


Udvikling af neurale netværk med en lineær vækst i deres adfærdskompleksitet
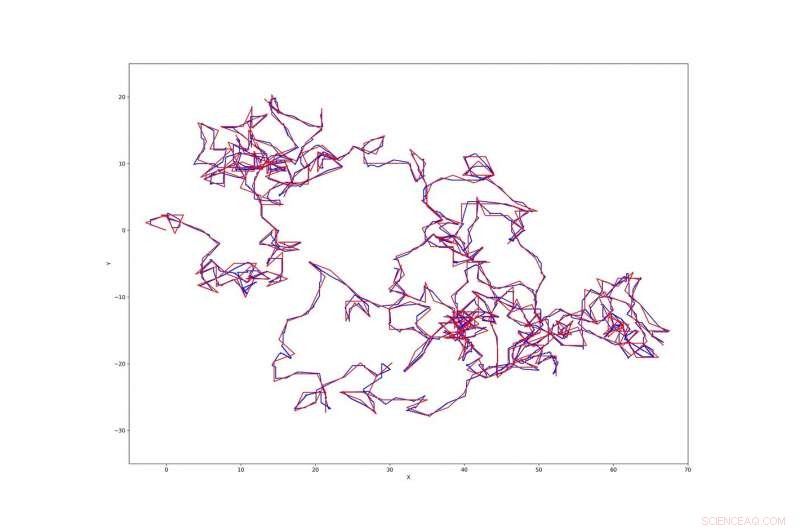
Bane for det bedst præsterende individ fra det bedste løb. Grøn:optimal bane; blå:faktisk bane. Begge starter ved (0, 0). Kredit:Inden &Jost.
Evolutionære algoritmer (EA'er) er designet til at replikere adfærden og udviklingen af biologiske organismer, mens de løser computerproblemer. I de seneste år, mange forskere har udviklet EA'er og brugt dem til at løse en række optimeringsopgaver.
Tidligere undersøgelser har også udforsket brugen af disse algoritmer til at lære topologien og forbindelsesvægtene af neurale netværk, der driver robotter eller virtuelle agenter. Når det anvendes i denne sammenhæng, EA'er kan have mange fordele, for eksempel at forbedre ydeevnen af kunstig intelligens (AI) agenter og forbedre vores nuværende forståelse af biologiske systemer.
Indtil nu, imidlertid, evolutionære robotapplikationer i den virkelige verden har været sparsomme, med meget få undersøgelser, der lykkes med at producere kompleks adfærd ved hjælp af EA'er. Forskere ved Nottingham Trent University og Max Planck Institute of Mathematics in the Sciences har for nylig udviklet en ny tilgang til at udvikle neurale netværk med en vedvarende lineær vækst i kompleksiteten af deres adfærd.
"Hvis vi ønsker en vedvarende lineær vækst af kompleksitet under evolutionen, vi skal sikre, at egenskaberne ved det miljø, hvori evolutionen finder sted, herunder befolkningsstrukturen og egenskaberne af de neurale netværk, der er relevante for de anvendte mutationsoperatører, forblive konstant i gennemsnit over evolutionær tid, " forklarede forskerne i deres papir. "Frysning af gamle netværksstrukturer er en metode, der hjælper med at opnå dette, men som undersøgelserne præsenteret her vil vise, det er ikke tilstrækkeligt i sig selv og ikke engang den største bidragyder til at nå målet."
I deres undersøgelse, forskerne fokuserede på en opgave, hvor et robotagent skal følge en foruddefineret bane på et uendeligt 2-D-plan så længe som muligt, som de refererer til som "banefølgende opgave." I deres version af denne opgave, agenten modtog ingen information via sine sensorer om, hvor den skulle placeres. Hvis det er for langt fra banen, imidlertid, agenten "dør". I denne sammenhæng, evolutionen skulle give agenten mulighed for at tilpasse sig denne opgave og lære at følge banen ved hjælp af åben sløjfekontrol.
For at opnå en lineær vækst i kompleksiteten af agentens evolutionære adfærd, mens denne opgave udføres, forskerne tilføjede fire nøglefunktioner til standardmetoder til udvikling af neurale netværk. I det væsentlige, de frøs netværkets tidligere udviklede struktur, samtidig med at der tilføjes tidsmæssige stilladser, en homogen overførselsfunktion for output noder og mutationer, der skaber nye veje til output.
Mens tilføjelse af mutationer til netværkene og ændring af overførselsfunktionerne af output førte til en vis forbedring af ydeevnen, de fandt, at den væsentligste forbedring var forbundet med brugen af stilladser. Dette tyder på, at standard neurale netværk ikke er særlig gode til at producere adfærd, der varierer over tid på en måde, der er let tilgængelig for evolution.
I deres papir, forskerne foreslår, at neurale netværk forstærket af stilladser kunne være en levedygtig løsning til at opnå stadig mere kompleks adfærd og udvikling i neurale netværk. I fremtiden, den tilgang, de præsenterede, kunne informere udviklingen af nye værktøjer til at udvikle neurale netværk til robotstyring og andre opgaver.
"Samlet set, udviklet kompleksitet er op til to størrelsesordener over den, der opnås ved standardmetoder i de eksperimenter, vi rapporterede, hvor den væsentligste begrænsende faktor for yderligere vækst er den tilgængelige driftstid, " skrev forskerne i deres papir. det sæt af metoder, der foreslås her, lover at være en nyttig tilføjelse til forskellige nuværende neuroevolutionsmetoder."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Strækbar elektronik en spilskifter til behandling af slagtilfældeKredit:Northwestern University En banebrydende ny bærbar, der er designet til at blive båret på halsen, kan være en game-changer inden for slagtilfælde rehabilitering. Udviklet i laboratoriet af
Strækbar elektronik en spilskifter til behandling af slagtilfældeKredit:Northwestern University En banebrydende ny bærbar, der er designet til at blive båret på halsen, kan være en game-changer inden for slagtilfælde rehabilitering. Udviklet i laboratoriet af -
 Enheden efterligner mangrovernes vandrensende kraftEnheden tæt på, i Menachem Elimeleks laboratorium. Kredit:Yale University Mangrovetræet overlever i sit subtropiske habitat ved effektivt at omdanne det salte vand i sit miljø til ferskvand - en i
Enheden efterligner mangrovernes vandrensende kraftEnheden tæt på, i Menachem Elimeleks laboratorium. Kredit:Yale University Mangrovetræet overlever i sit subtropiske habitat ved effektivt at omdanne det salte vand i sit miljø til ferskvand - en i -
 direktører for sundhedsvæsenet fører an i lønI denne 8. januar, 2018, fil foto, en certificeret apotekstekniker fylder en sprøjte til brug i en I.V. på et hospital i Toledo, Ohio. De sundeste lønpakker går til administrerende direktører hos sund
direktører for sundhedsvæsenet fører an i lønI denne 8. januar, 2018, fil foto, en certificeret apotekstekniker fylder en sprøjte til brug i en I.V. på et hospital i Toledo, Ohio. De sundeste lønpakker går til administrerende direktører hos sund -
 MIMIC thorax røntgendatabase for at give forskere adgang til over 350, 000 røntgenbilleder af pati…Forskere har frigivet et lager med mere end 350, 000 detaljerede røntgenbilleder af thorax, som er gratis og åben for akademiske, klinisk, og industrielle efterforskere. Kredit:Massachusetts Institute
MIMIC thorax røntgendatabase for at give forskere adgang til over 350, 000 røntgenbilleder af pati…Forskere har frigivet et lager med mere end 350, 000 detaljerede røntgenbilleder af thorax, som er gratis og åben for akademiske, klinisk, og industrielle efterforskere. Kredit:Massachusetts Institute
- Undersøgelse viser, hvordan små rum kunne have været forud for celler
- Asteroider overrasker tæt på, illustrerer behovet for flere øjne på himlen
- Den højeste præ-moderne blyforurening fandt sted for 800 år siden
- En dyb læringsbaseret metode til at opdage cybermobning på Twitter
- Design af sociale medier, der søger at afbøde polarisering, kan øge den ideologiske afstand
- NASA Goddard arbejder sammen for at studere uåbnede Apollo-prøver