


Robotkontrolsystem til at gribe og slippe genstande under både tørre og våde forhold
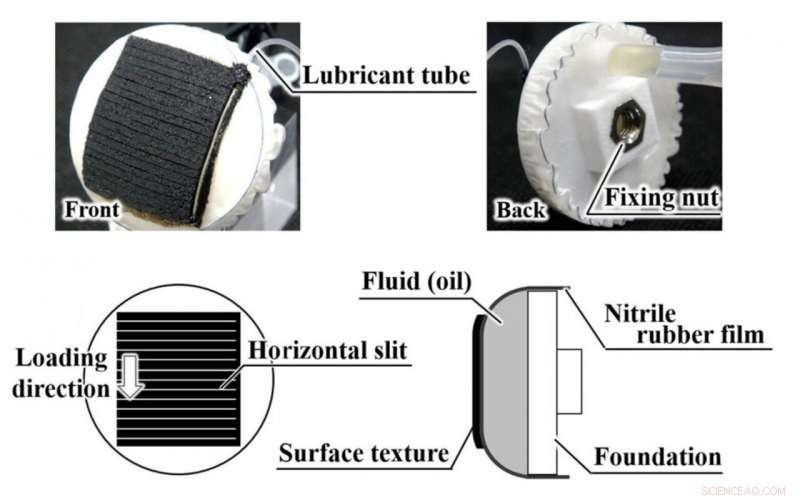
Dette er en flydende fingerspids med overfladetekstur bundet. Kredit:Kanazawa University
Industrirobotter er nu meget udbredt og er uundværlige i bilfremstilling og på andre områder. Konventionelle robothænder er velegnede til at gribe faste faste genstande, hvorimod det ikke er let at tage fat i komplicerede genstande eller forsigtigt at tage fat i bløde genstande. Det er også nødvendigt, under forskellige forhold, at reagere på fysiske egenskaber ved genstande såsom overfladekarakteristika:tør, våd, etc.
En fingerspids med blød overflade på en robothånd er deformerbar og kan ret let gribe fat i en genstand med kompliceret form, da kontaktområdet kan forstørres ved overfladedeformation som reaktion på objektformen. Bløde fingerspidser er meget effektive til at gribe bløde genstande; selv tofu kan fattes. Generelt, imidlertid, overfladefriktionen af blødt materiale er høj, hvilket gør udgivelsen sværere. Det er også svært at frigive genstande til ønskede positioner, især i tilfælde, hvor arbejdsrummet er snævert.
En gruppe ledet af prof. Tetsuyou Watanabe ved Kanazawa University har forsket i kontrolteknologi til at gribe objekter ved fingerspidserne af robothænder. I nærværende undersøgelse, gruppen havde til formål at udvikle et friktionskontrolsystem. Gruppen brugte de bløde fingerspidser af en robothånd til at gribe genstande; frigivelse blev opnået ved at påføre (injicere) et smøremiddel. I dette studie, absolut ethanol (> 99,5 %) blev brugt som smøremiddel, da ethanol er kemisk sikkert og let at tørre, og da dens overfladespænding er lav.
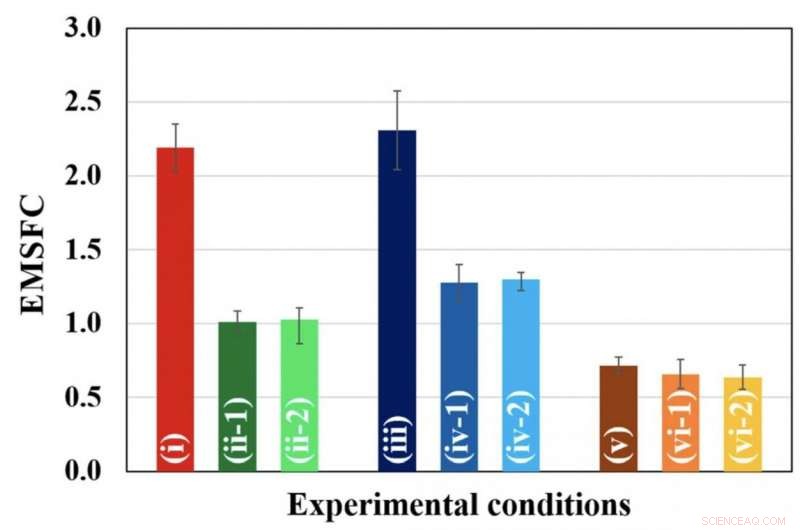
EMSFC under forskellige eksperimentelle forhold. Målmaterialet var polypropylen. En polypropylen genstand blev grebet af flydende fingerspidser vist i figur 1, og den ækvivalente maksimale statiske friktionskoefficient (EMSFC)*2) blev målt for at afsløre effekten af smøremidlet. (i) tør:(ii-1) tør, smøremiddel indsprøjtet før greb:(ii-2) tør, smøremiddel indsprøjtet efter greb:(iii) vådt med vand:(iv-1) vådt med vand, smøremiddel indsprøjtet før greb:(iv-2) vådt med vand, smøremiddel indsprøjtet efter greb:(v) olieagtig med kædesavsolie:(vi-1) olieagtig med kædesavsolie, smøremiddel indsprøjtet før greb:(vi-2) olieagtig med kædesavsolie, smøremiddel indsprøjtet efter greb. Virkningen af smøremidlet, absolut ethanol, blev verificeret under både tørre og våde forhold. Kredit:Kanazawa University
Som det ses i figur 1, en nitrilgummifilm blev bundet til siderne af fingerspidsfundamentet for at skabe et rum til påfyldning med kædesavsolie for at lave en "flydende fingerspids." Derefter blev en silikone "tekstur") bundet til at belægge gummifilmen; materialet i "teksturen" var en silikoneforsegling med slidser, hvis interval var 1,5 mm, vinkelret på belastningsretningen. Slidserne blev indført for mere friktion under en vandvåd tilstand og for smøremiddelspredning. Med denne flydende fingerspids, genstande af forskellige materialer brugt til køkkenredskaber blev grebet, og det blev verificeret, at ved påføring af smøremidlet, friktionen var faktisk reduceret (figur 2). Friktionen blev reduceret under både tørre og våde forhold, hvorimod en sådan smørende effekt ikke blev observeret under en olieagtig tilstand.
Næste, der blev udført en simulering af bokspakning som vist i figur 3. En papirkasse blev grebet med to væskefingerspidser fra begge sider. Den ovenfor beskrevne "tekstur" blev bundet til hver væskefingerspids. Stabilt greb blev bekræftet ved at lægge en vægt på papirkassen. Efter fjernelse af vægten, smøremiddel blev sprøjtet ind i begge væskefingerspidser, hvilket forårsagede en nedadgående glidning af papirkassen på ret kort tid (mindre end 2,5 s), så papirkasseemballeringsopgaven blev afsluttet (figur 3). Som vist her, en "tekstur" af høj friktion blev bundet til væskefingerspidsen, og indsprøjtning af et smøremiddel (her, absolut ethanol) reducerede friktionen. Dermed, frigivelse og placering af en genstand i en ønsket position blev opnået ved at kontrollere friktionen uden at flytte fingerspidserne.
I dette studie, det blev verificeret, at objekter, der greb med bløde overfladevæskefingerspidser med høj friktion, kunne kontrolleres ved at påføre et passende smøremiddel. Det er, imidlertid, nødvendigt at lave flere eksperimenter under forskellige forhold for at anvende den nuværende styringsteknologi til fremstillingsmiljøer. Ikke desto mindre, denne undersøgelse forventes at være et skridt fremad for at realisere arbejdsautomatisering af, for eksempel, gribe og frigive genstande i et snævert rum.
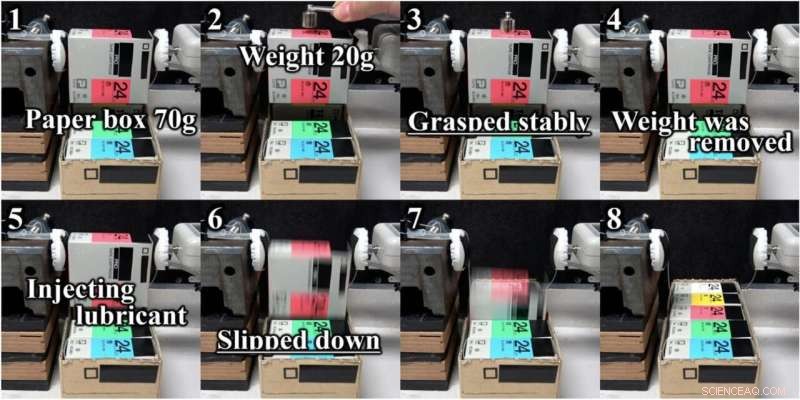
Dette er en simulering af en pakkeopgave i papirboks. (1) En papirkasse (70 g) blev grebet af to flydende fingerspidser fra venstre og højre side, (2) Anbringelse af en vægt på 20 g på papirkassen, (3) Bekræftelse af det stabile greb, (4) Fjernelse af vægten, (5) Indsprøjtning af smøremiddel, (6) Papirkassen glider nedad, (7) Papirkassen glider ind i den lille kasse, (8) Færdiggørelse af papirkassepakning. Kredit:Kanazawa University
Sidste artikelEU lancerer en dybdegående undersøgelse af Amazon over databrug
Næste artikelTeknologien slår romantikken ved Tour de France
 Varme artikler
Varme artikler
-
 Spotify lancerer en selvstændig musikapp til børnKredit:CC0 Public Domain Spotify ønsker at tilslutte dine børn til musik i en tidlig alder. Og det gør det svenske firma ved at lancere en skræddersyet Spotify Kids-app på onsdag, oprindeligt i be
Spotify lancerer en selvstændig musikapp til børnKredit:CC0 Public Domain Spotify ønsker at tilslutte dine børn til musik i en tidlig alder. Og det gør det svenske firma ved at lancere en skræddersyet Spotify Kids-app på onsdag, oprindeligt i be -
 Amazon løfter sløret for nye værktøjer til at luge ud forfalskede varerAmazon optrapper indsatsen for at begrænse salget af forfalskede varer ved at bruge teknologiske værktøjer og ved at tillade mærker selv at fjerne fortegnelser Amazon annoncerede torsdag et nyt in
Amazon løfter sløret for nye værktøjer til at luge ud forfalskede varerAmazon optrapper indsatsen for at begrænse salget af forfalskede varer ved at bruge teknologiske værktøjer og ved at tillade mærker selv at fjerne fortegnelser Amazon annoncerede torsdag et nyt in -
 Forskere foreslår en metode til at balancere brugeroplevelse og skyomkostningerKredit:CC0 Public Domain For en online gamer, forsinkelse er det værste. Spilleren ser, fortæller avataren om at bevæge sig for at undgå en anden spillers angreb, men avataren gør ingenting. Deref
Forskere foreslår en metode til at balancere brugeroplevelse og skyomkostningerKredit:CC0 Public Domain For en online gamer, forsinkelse er det værste. Spilleren ser, fortæller avataren om at bevæge sig for at undgå en anden spillers angreb, men avataren gør ingenting. Deref -
 Tesco Bank idømt en bøde af den britiske regulator for hackingEn kunde bruger en RBS-branded automated teller machine (ATM), på en Tesco Bank -kontant, i Liverpool, nordvestlige England, den 7. november, 2016 Den britiske Tesco Bank er blevet idømt en bøde p
Tesco Bank idømt en bøde af den britiske regulator for hackingEn kunde bruger en RBS-branded automated teller machine (ATM), på en Tesco Bank -kontant, i Liverpool, nordvestlige England, den 7. november, 2016 Den britiske Tesco Bank er blevet idømt en bøde p
- Projektionssystem til undersøgelse af insektsyn kunne føre til nye navigationshjælpemidler
- Officiel:Trump ønsker at skære ned på EPA-arbejdsstyrken, budget
- Gødningsfest og hungersnød:Løsning af det globale nitrogenproblem
- Sporing af de økonomiske konsekvenser af COVID-19 ét skib ad gangen
- Tyngdekraft (fysik): Hvad er det og hvorfor er det vigtigt?
- Ude af denne verden:Shepard satte golf på månen for 50 år siden