


Agile ubundne fuldbløde robotter i væske
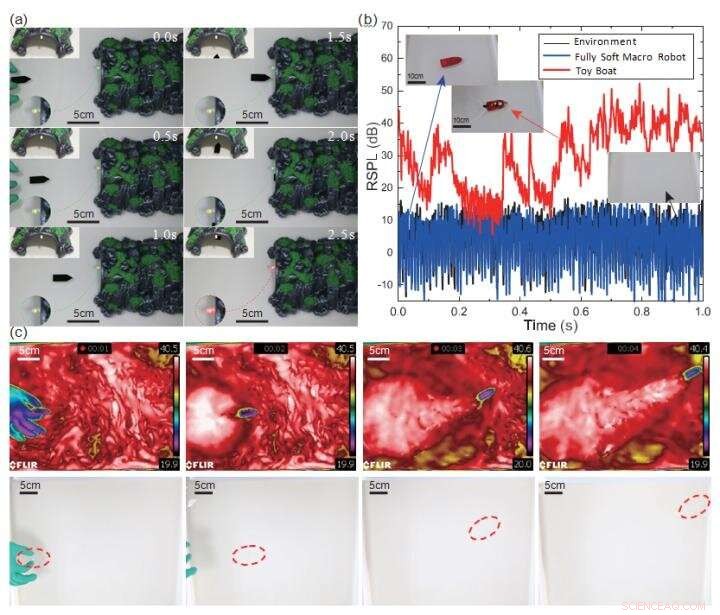
(a) Fotografier af en robot målrettet mod en LED-indikeret sti. Målretningsdemonstrationen viser den nøjagtighed, som robotstyringen kan opnå. (b) Sammenligning af det målte relative støjniveau for en blød makrorobot og en batteridrevet, legetøjsbåd af samme størrelse. RSPL angiver det relative lydtrykniveau. Robotten udviser et meget lavere støjniveau sammenlignet med legetøjsbåden. (c) Fotografier af en kold robot, der bevæger sig i varmt vand, taget af et infrarødt videokamera og et normalt kamera, henholdsvis. Kredit:©Science China Press
Bløde robotter har fået stor opmærksomhed i de seneste år for deres unikke egenskaber sammenlignet med traditionelle stive robotter. Imidlertid, i modsætning til Baymax i filmen "Big Hero 6, "state-of-the-art blød robot er bare en prototype i laboratorier, normalt bundet, hvilket betyder, at det kræver en elektrisk ledning eller pneumatisk slange til strømforsyning. For at udnytte det fulde potentiale af bløde robotter, ubundet design foretrækkes. Eksisterende tilgange til at udstyre de bløde robotter med ubundet design involverer normalt energikilder med høj energitæthed, som fører til integrationsproblemer, ellers vil robotten være fyldig og klodset til at bære strømkilder med lav energitæthed.
I naturen er enorme skabninger, der har udviklet sig i milliarder af år for at overleve. Rove biller i slægten Stenus, en type terrestriske insekter lever omkring bassiner eller vandløb, ville få et udbrud af kinetisk energi for at undslippe, når de ved et uheld faldt på vandet, ved at udskille kemikalier for at generere en overfladeenergigradient. Sådan en fremdriftsproces, almindeligvis kendt som Marangoni Propulsion, blev adopteret af levende væsner, så det var mildt og blidt, fuldstændig kompatibel med bløde materialer.
I en ny forskningsartikel offentliggjort i Beijing-baserede National Science Review , forskere ved Huazhong University of Science &Technology rapporterer om en ubundet fuldt blød robot i væske, hvis aktivering anvender miljømæssige energigradienter. Ved at frigive miljøaktive materialer (EAM'er) til det flydende miljø, robotten kunne opnå en smidig hastighed på 5,5 kropslængder i sekundet, hvilket er 7 gange højere end den bedst rapporterede værdi i den ubundne bløde robotfisk.
"Der opstår nogle få fordele ved at indføre en sådan mekanisme, såsom stilhed, ingen termisk træthed og så videre." Prof. Zhigang Wu sagde, "Vigtigere, aktiveringen og robottens funktionelle realisering kan suppleres separat. Designeren, for første gang, får mulighed for at fokusere på funktionsrealiseringen. Dette kan muliggøre den bløde robot i nogle uberørte scenarier i fremtiden."
 Varme artikler
Varme artikler
-
 Huawei vender sig til Afrika for at opveje amerikansk sortlisteDen kinesiske tech -gigant Huawei, nu midt i spændinger mellem USA og Kina, har søgt at styrke sine bånd i Afrika Da USA leder en indsats for Vesten for at undgå Huawei over frygt for sikkerhed, d
Huawei vender sig til Afrika for at opveje amerikansk sortlisteDen kinesiske tech -gigant Huawei, nu midt i spændinger mellem USA og Kina, har søgt at styrke sine bånd i Afrika Da USA leder en indsats for Vesten for at undgå Huawei over frygt for sikkerhed, d -
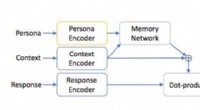 Facebook-forskere bygger et datasæt til at træne personlige dialogagenterPersona-baseret netværksarkitektur. Kredit:Mazaré et al. Forskere på Facebook har for nylig udarbejdet et datasæt med 5 millioner personas og 700 millioner persona-baserede dialoger. Denne databas
Facebook-forskere bygger et datasæt til at træne personlige dialogagenterPersona-baseret netværksarkitektur. Kredit:Mazaré et al. Forskere på Facebook har for nylig udarbejdet et datasæt med 5 millioner personas og 700 millioner persona-baserede dialoger. Denne databas -
 Hvad mennesker vil have i en automatiseret bilKredit:CC0 Public Domain Behagelig, samvittighedsfuld og stabil. Dette er tre menneskelige personlighedstræk, som det viser sig, vi ønsker at se i vores førerløse biler, uanset om vi selv besidder
Hvad mennesker vil have i en automatiseret bilKredit:CC0 Public Domain Behagelig, samvittighedsfuld og stabil. Dette er tre menneskelige personlighedstræk, som det viser sig, vi ønsker at se i vores førerløse biler, uanset om vi selv besidder -
 Californien udvider det digitale privatliv meget. Vil folk bruge det?I denne 8. oktober, 2019, fil foto en kvinde skriver på et tastatur i New York. Fyrre millioner californianere vil om kort tid opnå stærkere digitale fortrolighedsrettigheder stærkere end nogen tidlig
Californien udvider det digitale privatliv meget. Vil folk bruge det?I denne 8. oktober, 2019, fil foto en kvinde skriver på et tastatur i New York. Fyrre millioner californianere vil om kort tid opnå stærkere digitale fortrolighedsrettigheder stærkere end nogen tidlig
- Sådan finder du ametyst i Georgia
- Sådan placeres brøker på et tal Line
- Fire typer fysisk vejrforhold
- Forsvundne træer enormt overvurderet som miljøtrussel, undersøgelse finder
- Tankstationer udleder langt flere giftige dampe end hidtil antaget
- Den værste tørke i årtier rammer Chiles hovedstad og udkanten