


Forskere bygger mikroskopiske biohybride robotter drevet af muskler, nerver
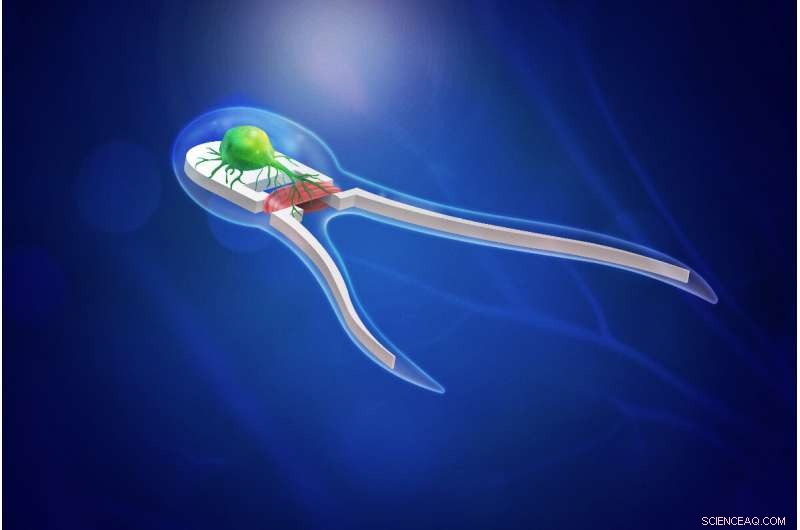
Kunstnergengivelse af en ny generation af biobots -- bløde robotanordninger drevet af skeletmuskelvæv stimuleret af motoriske neuroner om bord. Kredit:Michael Vincent
Forskere har udviklet bløde robotanordninger drevet af neuromuskulært væv, der udløses, når de stimuleres af lys - hvilket bringer maskinteknik et skridt tættere på at udvikle autonome biobots.
I 2014 forskerhold ledet af mekanisk videnskab og ingeniørprofessor Taher Saif og bioingeniørprofessor Rashid Bashir ved University of Illinois arbejdede sammen om at udvikle de første selvkørende biohybride svømme- og gående biobots drevet af at slå hjertemuskelceller afledt af rotter.
"Vores første svømmerundersøgelse viste med succes, at bots, modelleret efter sædceller, kunne faktisk svømme, " sagde Saif. "Den generation af single-tailed bots brugte hjertevæv, der slår af sig selv, men de kunne ikke mærke miljøet eller tage nogen beslutninger."
I en ny undersøgelse offentliggjort i Proceedings of the National Academy of Sciences og ledet af Saif, forskerne demonstrerer en ny generation af to-halede bots drevet af skeletmuskelvæv stimuleret af motoriske neuroner om bord. Neuronerne har optogenetiske egenskaber:Ved eksponering for lys, neuronerne vil fyre for at aktivere musklerne.
"Vi anvendte en optogenetisk neuroncellekultur, stammer fra musestamceller, støder op til muskelvævet, " sagde Saif. "Neuronerne rykkede frem mod musklen og dannede neuromuskulære forbindelser, og svømmeren samlede sig selv."
Efter at have bekræftet, at det neuromuskulære væv var kompatibelt med deres syntetiske biobotskeletter, holdet arbejdede på at optimere svømmerens evner.
Forskerholdet omfatter bl. fra venstre, professor Taher Saif, kandidatstuderende Onur Aydin, kandidatstuderende Xiastian Zhang, professor Mattia Gazzola, kandidatstuderende Gelson J. Pagan-Diaz, siddende, og professor og dekan ved Grainger College of Engineering, Rashid Bashir. Kredit:L. Brian Stauffer
"Vi brugte beregningsmodeller, ledet af mekanisk videnskab og ingeniørprofessor Mattia Gazzola, at bestemme hvilke fysiske egenskaber der ville føre til den hurtigste og mest effektive svømning, " sagde Saif. "F.eks. vi så på variationer i antallet af haler og halelængder for det mest effektive design af biohybrid svømmeren."
"I betragtning af det faktum, at biologiske aktuatorer, eller biobots, er ikke så modne som andre teknologier, de er ude af stand til at producere store kræfter. Dette gør deres bevægelser svære at kontrollere, " sagde Gazzola. "Det er meget vigtigt at omhyggeligt designe stilladset, som biobotterne vokser omkring og interagerer med for at få mest muligt ud af teknologien og opnå lokomotivfunktioner. De computersimuleringer, vi kører, spiller en afgørende rolle i denne opgave, da vi kan spænde over en række mulige designs og kun vælge de mest lovende til test i det virkelige liv."
"Evnen til at drive muskelaktivitet med neuroner baner vejen for yderligere integration af neurale enheder i biohybride systemer, " sagde Saif. "I betragtning af vores forståelse af neural kontrol hos dyr, det kan være muligt at komme videre med biohybrid neuromuskulært design ved at bruge en hierarkisk organisation af neurale netværk."
Saif sagde, at han og hans team forestiller sig, at dette fremskridt fører til udviklingen af flercellede manipulerede levende systemer med evnen til at reagere intelligent på miljømæssige signaler til anvendelser inden for bioteknologi, medicin og selvhelbredende materialeteknologier.
Imidlertid, holdet erkender, at - ligesom levende organismer - ikke to biohybride maskiner vil udvikle sig til at være nøjagtig ens.
"Ligesom tvillinger ikke rigtig er identiske, to maskiner designet til at udføre den samme funktion vil ikke være ens, " sagde Saif. "Den ene kan bevæge sig hurtigere eller helbrede fra skade anderledes end den anden - en unik egenskab ved levende maskiner."
 Varme artikler
Varme artikler
-
 Peberplukkerobot demonstrerer sine færdigheder inden for automatisering af drivhusarbejderKredit:MONOPOLY919, Shutterstock Med den stigende mangel på kvalificeret arbejdskraft i landbruget, der er et stigende behov for robotisering til at udføre arbejdskrævende og gentagne opgaver i dr
Peberplukkerobot demonstrerer sine færdigheder inden for automatisering af drivhusarbejderKredit:MONOPOLY919, Shutterstock Med den stigende mangel på kvalificeret arbejdskraft i landbruget, der er et stigende behov for robotisering til at udføre arbejdskrævende og gentagne opgaver i dr -
 Ion drev rummotor brugt på fly for første gangKredit:Steven Barrett/MIT Forestil dig en flymotor, der ikke har bevægelige dele, producerer ingen skadelig udstødning og larmer ikke. Det er, hvad forskere ved Massachusetts Institute of Technolo
Ion drev rummotor brugt på fly for første gangKredit:Steven Barrett/MIT Forestil dig en flymotor, der ikke har bevægelige dele, producerer ingen skadelig udstødning og larmer ikke. Det er, hvad forskere ved Massachusetts Institute of Technolo -
 Fordybende etisk værktøj hjælper udviklere med at undgå dystopi af Internet of ThingsKredit:Insight Publishers Googles berygtede motto Vær ikke ond lagde grundlæggernes grundværdier i de enkleste termer (uanset om du tror, at de har holdt fast ved deres løfte, er en anden samtal
Fordybende etisk værktøj hjælper udviklere med at undgå dystopi af Internet of ThingsKredit:Insight Publishers Googles berygtede motto Vær ikke ond lagde grundlæggernes grundværdier i de enkleste termer (uanset om du tror, at de har holdt fast ved deres løfte, er en anden samtal -
 Undersøgelse finder, at online restaurantinformation kan forudsige vigtige nabolagsindikatorerKredit:CC0 Public Domain Lejlighedssøgende i storbyer bruger ofte tilstedeværelsen af restauranter til at afgøre, om et kvarter ville være et godt sted at bo. Det viser sig, at der er meget bag
Undersøgelse finder, at online restaurantinformation kan forudsige vigtige nabolagsindikatorerKredit:CC0 Public Domain Lejlighedssøgende i storbyer bruger ofte tilstedeværelsen af restauranter til at afgøre, om et kvarter ville være et godt sted at bo. Det viser sig, at der er meget bag
- Højteknologiske sensorer til at indsamle langsigtede biogeokemiske data
- Nye fremskridt ved brug af eksotisk stof kan føre til ultrahurtig computing
- Hvordan dagens MBA-kandidater kan hjælpe med at redde verden
- Hvor meget påvirker Airbnb egentlig huslejer og boligpriser?
- Mere end 3000 års menneskelig aktivitet på 5 kvadratmeter
- Blå natlysende skyer dukker op længere sydpå end nogensinde før, og forurening kan være en års…