


Undersøgelse af robotillusioner og simuleringer af virkeligheden
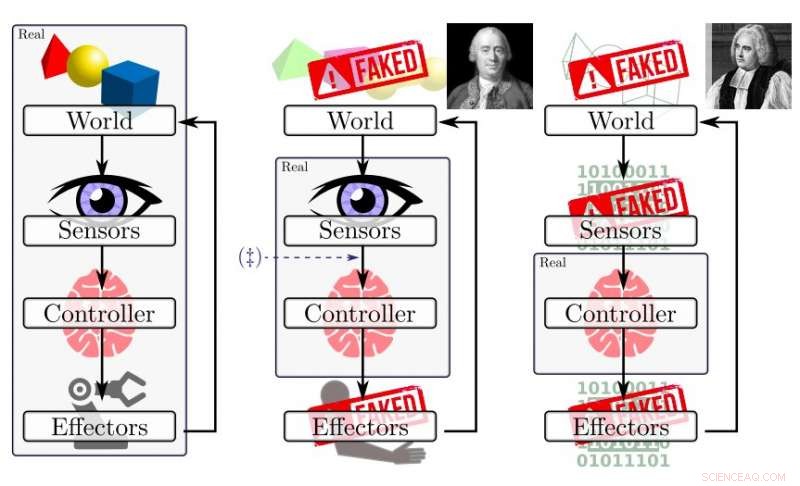
En illustration af forskellige former for falskneri matchet med passende intellektuelle positioner:den ortodokse opfattelse (venstre) og to former for filosofisk skepsis (midten og højre). Den venstre kolonne repræsenterer et fysisk roboteksperiment fra ende til ende, hvor hver del er ægte. Den midterste kolonne, bærer David Humes buste, involverer rigtige sensorer, men også grund til at tvivle på rigtigheden af den verden, de rapporterer. Kolonnen længst til højre, ledet af biskop Berkeley, har en rigtig controller, men alle andre elementer er blot software - det repræsenterer et roboteksperiment udført i simulering (til almindelig brug af det udtryk), hvor information injiceres direkte i robottens cortex. Humes klumme er det tilfælde, der er studeret i papiret:robotter opfatter en verden medieret af sensorer, der er forankret i den virkelige verden, men det er en verden af 'intet andet end sofistik og illusion.' Kredit:Shell &O'Kane.
For at evaluere ydeevnen af robotiske algoritmer og controllere, forskere bruger typisk softwaresimuleringer eller rigtige fysiske robotter. Selvom disse kan fremstå som to adskilte evalueringsstrategier, der er en hel anden række af muligheder, der kombinerer elementer fra begge dele.
I en nylig undersøgelse, forskere ved Texas A&M University og University of South Carolina har sat sig for at undersøge evaluerings- og udførelsesscenarier, der ligger i skæringspunktet mellem simuleringer og virkelige implementeringer. Deres undersøgelse, skitseret i et papir, der er forududgivet på arXiv, fokuserer specifikt på tilfælde, hvor rigtige robotter opfatter verden via deres sensorer, hvor det miljø, de fornemmer, kunne ses som en ren illusion.
"Vi overvejer problemer, hvor robotter konspirerer for at præsentere et syn på verden, der adskiller sig fra virkeligheden, "Dylan Shell og Jason O'Kane, de forskere, der har udført undersøgelsen, skrev i deres papir. "Forespørgslen er motiveret af problemet med at validere robotadfærd fysisk på trods af, at der er en uoverensstemmelse mellem de robotter, vi har ved hånden, og dem, vi ønsker at studere, eller miljøet for test, der er tilgængeligt versus det, der er ønsket, eller andre potentielle uoverensstemmelser i denne retning."
Studiet henter inspiration fra tidligere biologisk forskning, som havde til formål at forstå de perceptuelle begrænsninger af levende organismer, og hvordan informationsmæssige uoverensstemmelser kan påvirke deres adfærd. I de seneste år, biologer er begyndt at bruge teknologiske værktøjer som virtual reality (VR) og augmented reality (AR) for at få en bedre forståelse af biologiske organismer og deres opfattelser.
Tilsvarende softwaresimuleringer er blevet en nøglekomponent i robotforskning, med mange forskere, der bruger dem til at udføre og teste deres robotsystemer og tilgange. I de fleste af disse tilfælde, en simuleringssoftware gengiver nogle elementer af en robots udførelse i en virtuel, snarere end fysisk, miljø, generere kunstige sensoraflæsninger eller tilstandsrelaterede data.
Dette rejser et andet spørgsmål:Hvor tæt er en simulator, som er et system i sig selv, faktisk reproducere den virkelige verden? Med det i tankerne, forskerne satte sig for at udforske forholdet mellem par af systemer, der "matcher hinanden, " såvel som tilfælde, hvor et af disse systemer er kraftfuldt nok til at fremmane en illusion om det andet.
"Efter at have formuleret konceptet om en overbevisende illusion, i det væsentlige en forestilling om systemsimulering, der finder sted i den virkelige verden, vi undersøger implikationerne af denne type simulerbarhed i form af infrastrukturkrav, Shell og O'Kane forklarede i deres papir. "Tid er en vigtig ressource:nogle robotter er muligvis i stand til at simulere andre, men måske, kun med en hastighed, der er langsommere end i realtid."
Shell og O'Kane foreslår, at de forskellige hastigheder, hvormed systemer kan simulere andre systemer, gør det muligt for forskere at beskrive simulerede og simulerede systemer i en relativ form. Baseret på denne antagelse, de udviklede nogle sætninger for at skitsere forholdet mellem et simuleret og et simuleret system, giver flere eksempler for hver enkelt.
Efterfølgende forskerne gennemførte et simpelt multiroboteksperiment baseret på den teori, de udviklede. I dette eksperiment, en robot skulle udføre en simpel navigationsopgave i et ubegrænset felt af forhindringer, både i simulering og på en fysisk robottestbed. Deres resultater tyder på, at forskellige simuleringstilgange kan have markant forskellige tidseffektiviteter til at producere en illusion for et givet system.
Observationerne indsamlet af Shell og O'Kane, såvel som den teori, de udviklede, kunne udvide den nuværende forståelse af simuleringssoftware, der bruges til at evaluere robotteknologiske tilgange, fremhæve nye aspekter af forholdet mellem simulerede og simulerende systemer. I deres fremtidige arbejde, de kunne udforske en række nye forskningsretninger, for eksempel at udvide deres teori til at adressere forestillingerne om usikkerhed og ikke-determinisme eller udvikle en rigere teori om effektive illusioner.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Renault -salget falder på det svækkende bilmarkedCity K-ZE er Renaults håb om at fange en del af det kinesiske marked for elbiler Den franske bilgigant Renault sagde tirsdag, at salget i første halvår blev ramt af en afmatning i flere vækstlande
Renault -salget falder på det svækkende bilmarkedCity K-ZE er Renaults håb om at fange en del af det kinesiske marked for elbiler Den franske bilgigant Renault sagde tirsdag, at salget i første halvår blev ramt af en afmatning i flere vækstlande -
 Kemikere demonstrerer en bæredygtig tilgang til kuldioxidopsamling fra luftenFra venstre, Radu Custelcean og Neil Williams fra Oak Ridge National Laboratory brugte en solcelledrevet ovn til at generere milde temperaturer, der frigiver kuldioxid fanget i guanidinkarbonatkrystal
Kemikere demonstrerer en bæredygtig tilgang til kuldioxidopsamling fra luftenFra venstre, Radu Custelcean og Neil Williams fra Oak Ridge National Laboratory brugte en solcelledrevet ovn til at generere milde temperaturer, der frigiver kuldioxid fanget i guanidinkarbonatkrystal -
 Alibaba-omsætningen steg i første kvartalDen kinesiske e-handelsgigant Alibaba sagde, at indtægterne i første kvartal i 2019 slog analytikerestimater Den kinesiske e-handelsgigant Alibaba sagde torsdag, at omsætningen i første kvartal sl
Alibaba-omsætningen steg i første kvartalDen kinesiske e-handelsgigant Alibaba sagde, at indtægterne i første kvartal i 2019 slog analytikerestimater Den kinesiske e-handelsgigant Alibaba sagde torsdag, at omsætningen i første kvartal sl -
 G7-ministre er enige om en plan om digital skat, men mere arbejde forudeG7-ministre nåede til konsensus om skridt i retning af at beskatte de digitale giganter midt i uoverensstemmelser mellem USA og Frankrig og Storbritannien. Ministre fra G7-topøkonomier nåede torsd
G7-ministre er enige om en plan om digital skat, men mere arbejde forudeG7-ministre nåede til konsensus om skridt i retning af at beskatte de digitale giganter midt i uoverensstemmelser mellem USA og Frankrig og Storbritannien. Ministre fra G7-topøkonomier nåede torsd
- Surfing videnskab:Afhængig af vejret, defineret af havet
- Meget effektive vådbehandlede solceller med molekyler i samme retning
- Gentrificering udløser et fald på 16 procent i bykriminalitet i Cambridge, Massachusetts
- Forbrugere villige til at betale mere for bæredygtigt brygget øl, undersøgelse finder
- NASA ser Tropical Depression 9 dannes øst for de små Antiller
- Robotter bryder nyt i byggebranchen