


Disse nye bløde aktuatorer kan gøre bløde robotter mindre omfangsrige
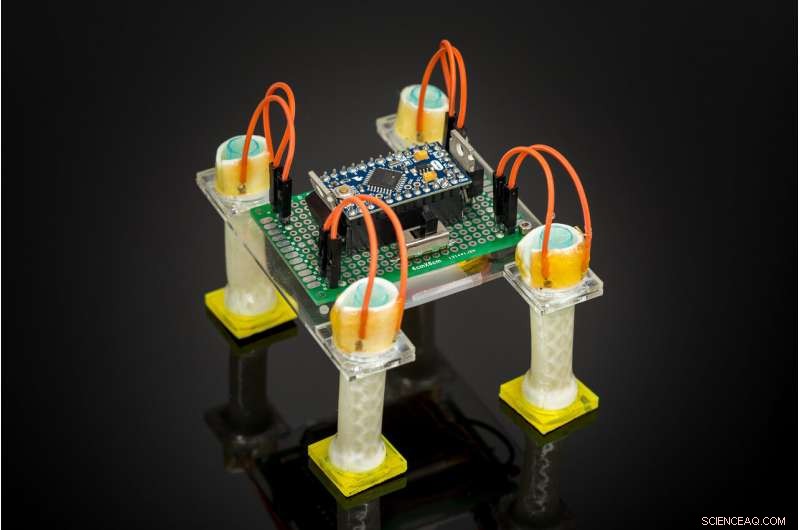
Elektrisk styret, ubundet blød robot bygget af fire bløde rørformede aktuatorer, en mikrocontroller og batteri. Robotten kan programmeres til at gå eller bære en genstand. Kredit:David Baillot/UC San Diego Jacobs School of Engineering
Ingeniører ved University of California San Diego har udviklet en måde at bygge bløde robotter, der er kompakte, bærbar og multifunktionel. Fremrykningen blev muliggjort ved at skabe bløde, rørformede aktuatorer, hvis bevægelser er elektrisk styret, gør dem nemme at integrere med små elektroniske komponenter.
Som et bevis på konceptet, ingeniører brugte disse nye aktuatorer til at bygge en blød, batteridrevet robot, der kan gå ubundet på flade overflader og flytte genstande. De byggede også en blød griber, der kan gribe og opfange små genstande.
Holdet, ledet af UC San Diego mekanisk og rumfartsingeniør professor Shengqiang Cai, udgav værket 11. oktober i Videnskabens fremskridt .
Et problem med de fleste bløde aktuatorer er, at de kommer med voluminøse opsætninger. Det skyldes, at deres bevægelser styres ved at pumpe enten luft eller væsker gennem kamre indeni. Så at bygge robotter med disse typer aktuatorer ville kræve, at de blev bundet til pumper, store strømkilder og andet specialiseret udstyr.
I den aktuelle undersøgelse, UC San Diego ingeniører skabte bløde aktuatorer, der styres med elektricitet. "Denne funktion gør vores rørformede aktuatorer kompatible med de fleste billige, kommercielt tilgængelige elektroniske enheder og batterier, " sagde Cai.
Aktuatorerne er lavet af en type materiale, der bruges til kunstige muskler i robotter, kaldet flydende krystal elastomerer. De er sammensat af flydende krystalmolekyler indlejret i et elastisk polymernetværk. Det særlige ved disse materialer er, at de ændrer form, bevæge sig og trække sig sammen som reaktion på stimuli såsom varme eller elektricitet - svarende til hvordan muskler trækker sig sammen som reaktion på signaler fra nerveceller.
For at konstruere hver aktuator, ingeniører klemte tre varmetråde mellem to tynde film af flydende krystal elastomer. Materialet rulles derefter ind i et rør, forstrakt og udsat for UV-lys.
Hver varmetråd kan styres uafhængigt for at få røret til at bøje i seks forskellige retninger. Når en elektrisk strøm føres gennem en eller to af ledningerne, det varmer en del af røret op og får det til at bøje i retning af disse ledninger. Når en strøm sendes gennem alle tre ledninger, hele røret trækker sig sammen, afkortning i længden. Når strømmen er slukket, røret køler langsomt ned og vender tilbage til sin oprindelige form.

Elektrisk styret, ubundet blød robot bygget af fire bløde rørformede aktuatorer, en mikrocontroller og batteri. Robotten kan programmeres til at gå eller bære en genstand. Kredit:David Baillot/UC San Diego Jacobs School of Engineering
"Brug af et eksternt påført elektrisk potentiale gør det nemt at programmere positionen af hver rørformet aktuator, " sagde første forfatter Qiguang He, en maskin- og rumfartsingeniør Ph.D. studerende ved UC San Diego Jacobs School of Engineering.
Kombinationen af flere aktuatorer sammen gjorde det muligt for ingeniører at bygge forskellige typer bløde robotter. De byggede en ubundet, gårobot med fire aktuatorer som ben. Denne robot er drevet af et lille lithium/polymer batteri ombord. De byggede også en blød griber med tre aktuatorer som fingre.
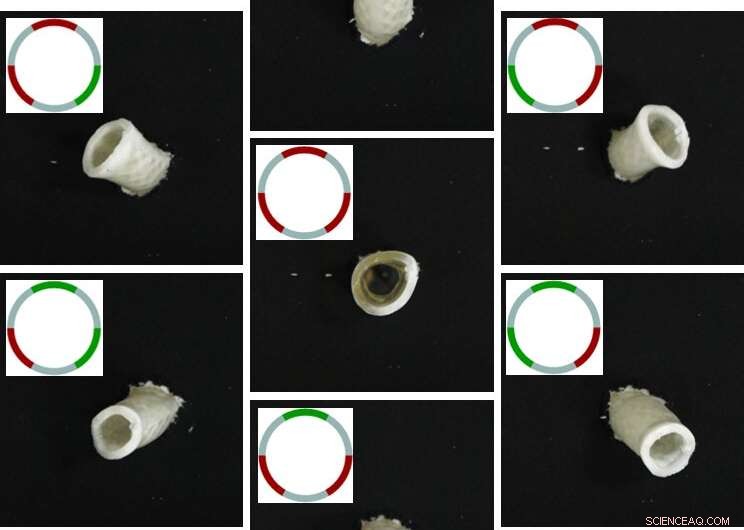
Afhængigt af hvilke varmeledninger der er elektrisk aktiveret (rød), den bløde rørformede aktuator kan bøjes i seks forskellige retninger (ydre billeder) og trække sig sammen i længden (midterbillede). Kredit:Qiguang He
Hver robot har en indbygget mikrocontroller, hvor ingeniører programmerede en sekvens af elektrisk styrede bevægelser til aktuatorerne. Dette gør det muligt for robotterne at bevæge sig uafhængigt.
Teamet arbejder nu på at lave bløde aktuatorer, der kan bevæge sig hurtigere. De nuværende aktuatorer tager omkring 30 sekunder at bøje og trække sig helt sammen, og op til fire minutter at vende tilbage til deres oprindelige former. Det er fordi materialet tager lidt tid at varme op og køle helt ned. Det ultimative mål er at lave aktuatorer, der kan trække sig sammen og slappe af lige så hurtigt som menneskelige muskler, Han sagde.
 Varme artikler
Varme artikler
-
 360 grader, 180 sekunder:Ny teknik hastighedsanalyse af afgrødeegenskaberNebraska -forskere har udtænkt en mere effektiv og præcis måde at scanne planters strukturelle egenskaber på. Kredit:Yufeng Ge | Suresh Thapa | Scott Schrage En potteplante med ni blade majs sidde
360 grader, 180 sekunder:Ny teknik hastighedsanalyse af afgrødeegenskaberNebraska -forskere har udtænkt en mere effektiv og præcis måde at scanne planters strukturelle egenskaber på. Kredit:Yufeng Ge | Suresh Thapa | Scott Schrage En potteplante med ni blade majs sidde -
 Casanova:En skalerbar konsensusprotokol for blockchainCasanova graf. Kredit:Pyrofex Corporation. Et team af forskere ved Pyrofex Corporation introducerede for nylig Casanova, en lederløs optimistisk konsensusalgoritme velegnet til brug i en blockchai
Casanova:En skalerbar konsensusprotokol for blockchainCasanova graf. Kredit:Pyrofex Corporation. Et team af forskere ved Pyrofex Corporation introducerede for nylig Casanova, en lederløs optimistisk konsensusalgoritme velegnet til brug i en blockchai -
 Er internettet vanedannende?Kredit:CC0 Public Domain Fremkomsten af ny teknologi medfører altid bekymringer om de virkninger, det kan have på brugerne med hensyn til fysisk og mental sundhed. Internettet, og specielt socia
Er internettet vanedannende?Kredit:CC0 Public Domain Fremkomsten af ny teknologi medfører altid bekymringer om de virkninger, det kan have på brugerne med hensyn til fysisk og mental sundhed. Internettet, og specielt socia -
 EU-lovgivere ønsker at reducere bilers emissioner med 40 procent inden 2030i denne 27. feb. 2018 filbillede, en dieselbil kører i Essen, Tyskland. Den tyske regering støttede planer om at hjælpe med at reducere forureningen fra dieselkøretøjer. (AP Photo/Martin Meissner)
EU-lovgivere ønsker at reducere bilers emissioner med 40 procent inden 2030i denne 27. feb. 2018 filbillede, en dieselbil kører i Essen, Tyskland. Den tyske regering støttede planer om at hjælpe med at reducere forureningen fra dieselkøretøjer. (AP Photo/Martin Meissner)
- Undersøgelse viser måde at skabe fælles fodslag om gen-redigering
- Ændringer i nedbør og temperaturer har allerede påvirket vandkvaliteten
- Ny teknik giver nøjagtig datering af gamle skeletter
- Comet U1 NEOWISE—en mulig kikkertkomet?
- Forskere får første blik på nyt, ekstremt sjælden galakse
- Video:Hvordan gamle iskerner viser sorte svanebegivenheder i historien - selv pandemier