


To-benet robot efterligner menneskelig balance, mens du løber og hopper
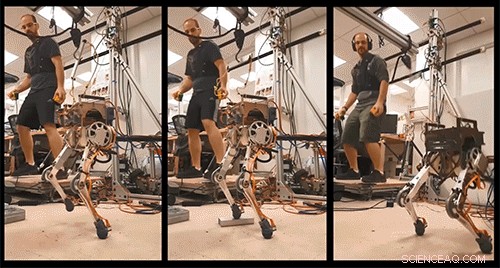
Joao Ramos teleopererer Little HERMES, en tobenet robot, der kan efterligne en operatørs balance for at forblive oprejst under løb, gå, og hopper på plads. Kredit:Joao Ramos og Sangbae Kim
Redning af ofre fra en brændende bygning, et kemikalieudslip, eller enhver katastrofe, der er utilgængelig for menneskelige respondenter, kan en dag være en mission for modstandsdygtige, fleksible robotter. Forestille, for eksempel, redningsbots, der kan gå gennem murbrokker på alle fire, rejs dig derefter op på to ben for at skubbe en tung forhindring til side eller bryde gennem en låst dør.
Ingeniører gør fremskridt med designet af firbenede robotter og deres evne til at løbe, hoppe og endda lave backflips. Men at blive tobenet, humanoide robotter til at udøve kraft eller skubbe mod noget uden at falde har været en væsentlig anstødssten.
Nu har ingeniører ved MIT og University of Illinois i Urbana-Champaign udviklet en metode til at kontrollere balancen hos en tobenet, teleoperateret robot-et vigtigt skridt i retning af at sætte en humanoid i stand til at udføre opgaver med stor indflydelse i udfordrende miljøer.
Holdets robot, fysisk ligner en bearbejdet torso og to ben, er fjernstyret af en menneskelig operatør iført en vest, der transmitterer information om menneskets bevægelse og jordreaktionskræfter til robotten.
Gennem vesten, den menneskelige operatør kan både styre robottens bevægelse og mærke robottens bevægelser. Hvis robotten begynder at vælte, mennesket føler et tilsvarende træk i vesten og kan justere på en måde for at genbalancere både sig selv og, synkront, robotten.
I eksperimenter med robotten for at teste denne nye "balance feedback" tilgang, forskerne var i stand til eksternt at opretholde robottens balance, da den hoppede og gik på plads synkroniseret med dens menneskelige operatør.
"Det er som at løbe med en tung rygsæk - du kan mærke, hvordan dynamikken i rygsækken bevæger sig rundt om dig, og du kan kompensere ordentligt, " siger Joao Ramos, der udviklede tilgangen som MIT postdoc. "Nu hvis du vil åbne en tung dør, mennesket kan beordre robotten til at kaste sin krop mod døren og skubbe den op, uden at miste balancen."
Ramos, som nu er assisterende professor ved University of Illinois i Urbana-Champaign, har detaljeret tilgangen i en undersøgelse, der vises i Videnskab robotik . Hans medforfatter på undersøgelsen er Sangbae Kim, lektor i maskinteknik ved MIT.
Mere end bevægelse
Tidligere har Kim og Ramos byggede den to-benede robot HERMES (til højeffektive robotmekanismer og elektromekanisk system) og udviklede metoder til at efterligne en operatørs bevægelser via teleoperation, en tilgang, som forskerne siger, har visse humanistiske fordele.
"Fordi du har en person, der kan lære og tilpasse sig i farten, en robot kan udføre bevægelser, som den aldrig har øvet før [via teleoperation], " siger Ramos.
I demonstrationer, HERMES har hældt kaffe i en kop, strakte en økse for at hugge træ, og håndterede en ildslukker for at slukke en brand.
Alle disse opgaver har involveret robottens overkrop og algoritmer til at matche robottens lemmerpositionering med dens operatørs. HERMES var i stand til at udføre kraftige bevægelser, fordi robotten var forankret på plads. Balance, i disse tilfælde, var meget nemmere at vedligeholde. Hvis robotten skulle tage nogle skridt, imidlertid, det ville sandsynligvis have væltet i forsøget på at efterligne operatørens bevægelser.
"Vi indså for at generere høje kræfter eller flytte tunge genstande, bare at kopiere bevægelser ville ikke være nok, fordi robotten let ville falde, "Kim siger." Vi var nødt til at kopiere operatørens dynamiske balance. "
Indtast lille HERMES, en miniatureversion af HERMES, der er omkring en tredjedel af størrelsen på en gennemsnitlig voksen. Holdet konstruerede robotten som blot en torso og to ben, og designet systemet specifikt til at teste opgaver i underkroppen, såsom bevægelse og balance. Som med sin helkropsmodstykke, Lille HERMES er designet til teleoperation, med en operatør egnet i en vest til at styre robottens handlinger.
For at robotten skal kopiere operatørens balance i stedet for kun deres bevægelser, holdet skulle først finde en enkel måde at repræsentere balance på. Ramos indså til sidst, at balancen kunne fjernes til to hovedingredienser:en persons massecenter og deres trykcenter - grundlæggende, et punkt på jorden, hvor der udøves en kraft svarende til alle støttekræfter.
Placeringen af massecentret i forhold til trykcentret, Ramos fandt, relaterer sig direkte til, hvor afbalanceret en person er på et givet tidspunkt. Han fandt også ud af, at positionen af disse to ingredienser fysisk kunne repræsenteres som et omvendt pendul. Forestil dig at svaje fra side til side, mens du forbliver forankret til det samme sted. Effekten ligner svajningen af et pendul på hovedet, den øverste ende repræsenterer et menneskes massecenter (normalt i torso) og bunden repræsenterer deres trykpunkt på jorden.
Tunge løft
For at definere, hvordan massecentrum forholder sig til trykcentrum, Ramos indsamlede menneskelige bevægelsesdata, inklusive målinger i laboratoriet, hvor han svajede frem og tilbage, gik på plads, og hoppede på en kraftplade, der målte de kræfter, han udøvede på jorden, da positionen af hans fødder og torso blev registreret. Derefter kondenserede han disse data til målinger af massecentret og trykcentret, og udviklet en model til at repræsentere hinanden i forhold til hinanden, som et omvendt pendul.
Han udviklede derefter en anden model, ligner modellen for menneskelig balance, men skaleret til dimensionerne af de mindre, lettere robot, og han udviklede en kontrolalgoritme til at forbinde og muliggøre feedback mellem de to modeller.
Forskerne testede denne balancefeedback-model, først på et simpelt omvendt pendul, som de byggede i laboratoriet, i form af en bjælke omtrent samme højde som Lille HERMES. De koblede strålen til deres teleoperationssystem, og den svajede frem og tilbage langs et spor som reaktion på en operatørs bevægelser. Mens operatøren svajede til den ene side, strålen gjorde det samme - en bevægelse, som operatøren også kunne mærke gennem vesten. Hvis strålen svajede for langt, operatøren, mærke træk, kunne læne sig den anden vej for at kompensere, og hold strålen afbalanceret.
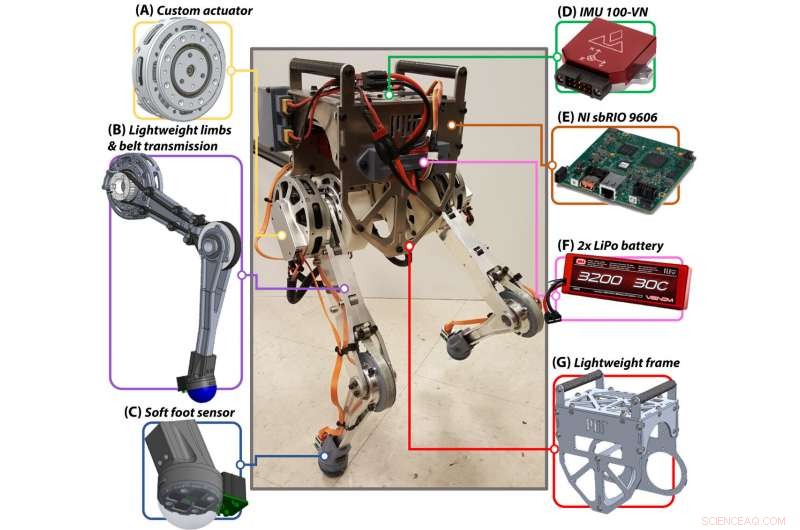
Den tobenede robot Lille HERMES. Kredit:Ramos og Kim, Sci. Robot. 4, eaav4282 (2019)
Eksperimenterne viste, at den nye feedback -model kunne fungere for at opretholde balancen på strålen, så forskerne prøvede derefter modellen på Lille HERMES. De udviklede også en algoritme til robotten til automatisk at oversætte den simple balancemodel til de kræfter, som hver af dens fødder skulle generere, at kopiere operatørens fødder.
I laboratoriet, Ramos fandt ud af, at da han bar vesten, han kunne ikke kun kontrollere robottens bevægelser og balance, men han kunne også mærke robottens bevægelser. Da robotten blev slået med en hammer fra forskellige retninger, Ramos følte vesten rykke i den retning, robotten bevægede sig. Ramos modstod instinktivt slæbebåden, som robotten registrerede som et subtilt skift i massecentrum i forhold til trykcentrum, som den igen efterlignede. Resultatet var, at robotten var i stand til at undgå at vælte, selv under gentagne slag på dens krop.
Lille HERMES efterlignede også Ramos i andre øvelser, herunder løb og hop på plads, og gå på ujævnt underlag, alt imens den opretholder balancen uden hjælp af tøjringer eller understøtninger.
"Balancefeedback er en svær ting at definere, fordi det er noget, vi gør uden at tænke, " siger Kim. "Dette er første gang balancefeedback er korrekt defineret for de dynamiske handlinger. Dette vil ændre, hvordan vi kontrollerer en teleopereret humanoid."
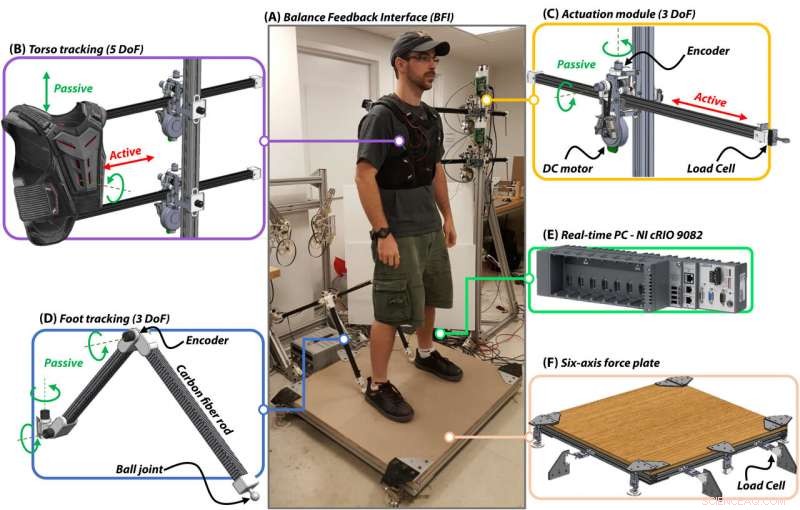
Teleoperationsgrænsefladen for den menneskelige operatør. Kredit:Ramos og Kim, Sci. Robot. 4, eaav4282 (2019)
Kim og Ramos vil fortsætte med at arbejde på at udvikle en helkrops-humanoid med lignende balancekontrol, for en dag at kunne galopere gennem en katastrofezone og rejse sig for at skubbe barrierer væk som en del af rednings- eller bjærgningsmissioner.
"Nu kan vi åbne tunge døre eller løfte eller kaste tunge genstande, med korrekt balancekommunikation, " siger Kim.
Sidste artikelDobbeltsidet tape til væv kan erstatte kirurgiske suturer
Næste artikelSystemet sørger for køling uden elektricitet
 Varme artikler
Varme artikler
-
 Hvordan blesensorer bedre kan registrere urinvejsinfektioner, reducere mere alvorlige sygdommePurdue University-forskere har fundet på en måde at indlejre en engangssensoranordning i bleer for bedre at kunne opdage urinvejsinfektioner. Kredit:Purdue University En urinvejsinfektion kan være
Hvordan blesensorer bedre kan registrere urinvejsinfektioner, reducere mere alvorlige sygdommePurdue University-forskere har fundet på en måde at indlejre en engangssensoranordning i bleer for bedre at kunne opdage urinvejsinfektioner. Kredit:Purdue University En urinvejsinfektion kan være -
 WhatsApp spillede en stor rolle i valget i NigeriaKredit:CC0 Public Domain Der er stigende bekymring for potentialet for budskabet og mediedelingsplatformen WhatsApp til at undergrave demokratiet i en række lande over hele verden, herunder Brasil
WhatsApp spillede en stor rolle i valget i NigeriaKredit:CC0 Public Domain Der er stigende bekymring for potentialet for budskabet og mediedelingsplatformen WhatsApp til at undergrave demokratiet i en række lande over hele verden, herunder Brasil -
 Etablering af system til 911-videoopkald giver designudfordringerImplementering af 911-videoopkald er muligvis ikke langt væk, med CRTC, der beder om, at ny 911-infrastruktur skal være på plads i 2020 - en ny undersøgelse ledet af Simon Fraser University antyder, a
Etablering af system til 911-videoopkald giver designudfordringerImplementering af 911-videoopkald er muligvis ikke langt væk, med CRTC, der beder om, at ny 911-infrastruktur skal være på plads i 2020 - en ny undersøgelse ledet af Simon Fraser University antyder, a -
 Et webcam er nok til at producere en 3D-model i realtid af en bevægende håndFranziska Müller, Max Planck Institut for Informatik, har udviklet et softwaresystem, der kun kræver det indbyggede kamera på en bærbar computer for at producere en 3-D-model i realtid af en hånd i be
Et webcam er nok til at producere en 3D-model i realtid af en bevægende håndFranziska Müller, Max Planck Institut for Informatik, har udviklet et softwaresystem, der kun kræver det indbyggede kamera på en bærbar computer for at producere en 3-D-model i realtid af en hånd i be
- Hvordan arbejder en GPS-sender på at studere pladebevægelser?
- 10 forskere, der var deres egne marsvin
- Spanien melder om tilfælde af kogalskab
- FN-rapport siger, at skrøbeligt klima sætter fødevaresikkerheden i fare
- Selskabsdyr i klimakrisen:Hvordan kæledyrsejere kan reducere deres miljøpåvirkninger
- Ny partikelanalyse teknik baner vej for bedre overvågning af luftforurening