


Design af ubemandede luftfartøjsbaner til energiminimering
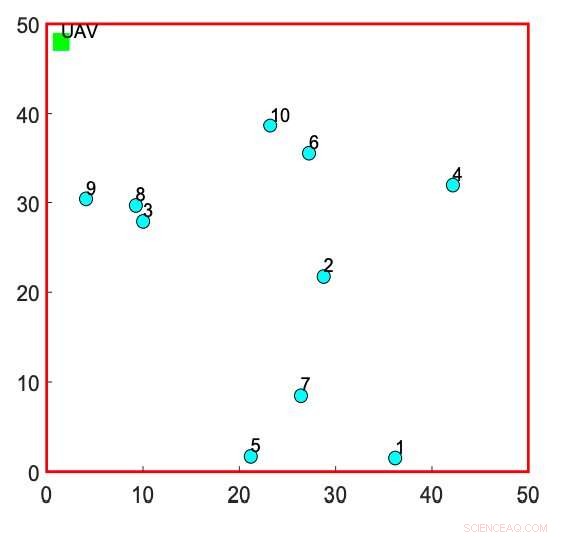
Billede der viser et todimensionalt kartesisk koordinatsystem, hvor UAV'en er placeret ved jordstationen og GU'erne er placeret i det betragtede område. Kredit:Tran et al.
Et team af forskere ved University of Luxembourg og Ontario Tech University har for nylig foreslået en ny tilgang til at designe baner for energieffektive, ubemandede luftfartøjer (UAV)-aktiveret trådløs kommunikation. Deres papir, forudgivet på arXiv, fokuserer specifikt på tilfælde, hvor en UAV fungerer som en flyvende basestation (BS) til at betjene jordbrugere (GS'er) inden for nogle forudbestemte latenstidsbegrænsninger.
"Vores mål er at designe UAV-banen for at minimere det samlede energiforbrug og samtidig opfylde RT-kravet og energibudgettet, hvilket opnås ved i fællesskab at optimere banen og UAV's hastigheder langs efterfølgende hop, " skrev forskerne i deres papir.
At optimere en UAV's bane og dens hastigheder sammen kan være noget vanskeligt at opnå. For at gøre det, forskerne udviklede en tilgang, der udfører to på hinanden følgende trin.
Deres tilgang indebærer brug af to forskellige algoritmer, en heuristisk søgning og en dynamisk programmering (DP) algoritme. Heuristiske søgemetoder fungerer ved at evaluere alle tilgængelige oplysninger ved hvert trin og beslutte, hvilken vej der skal følges ved at vælge tilgængelige rangeringsmuligheder.
Dynamisk programmering, på den anden side, er en tilgang til at løse problemer med overlappende 'delproblemer." Det virker ved kun at tackle individuelle underproblemer én gang og gemme resultaterne af disse analyser, for at bruge dem igen, hvis det samme underproblem støder på i fremtiden.
Forskerne brugte deres heuristiske søgning og dynamiske programmeringsalgoritmer til at opnå et gennemførligt sæt af baner for UAV'er, der ikke overtræder jordbrugerens latenstidsbegrænsninger. Opgaven med at finde disse baner løses, som var det et såkaldt rejsesælgerproblem med tidsvinduer (TSPTW). TSPTW er et algoritmisk problem, der bruges i datalogi, og som indebærer at finde en minimumsomkostningssti for en sælger, der ønsker at rejse og besøge hver af et sæt byer præcis én gang inden for et bestemt tidsvindue.
De baner, der blev foreslået af algoritmerne, blev efterfølgende sammenlignet med dem, der blev opnået ved hjælp af udtømmende søgeteknikker, og når man nærmede sig opgaven som den rejsende sælgerproblem (TSP); et algoritmisk problem, hvor man skal finde frem til de optimale ruter for en sælger, der ønsker at besøge et bestemt sæt byer uden særlige tidskrav.
"Mens den udtømmende algoritme opnår den bedste ydeevne til høje beregningsomkostninger, den heuristiske algoritme udviser dårligere ydeevne med lav kompleksitet, " forklarede forskerne i deres papir. "Som et resultat, DP foreslås som en praktisk afvejning mellem de udtømmende og heuristiske algoritmer."
Ud over de to algoritmer til at finde optimale UAV-baner, forskerne foreslog også en teknik til energiminimering. Denne metode fungerer ved i fællesskab at optimere UAV'ens hastigheder og efterfølgende hop.
Da forskerne evaluerede deres algoritmer, fandt de ud af, at de er yderst effektive, udkonkurrere eksisterende state-of-the-art teknikker både med hensyn til energiforbrug og udfaldsydelse. I fremtiden, den nye tilgang, de foreslog, kunne hjælpe med at designe bedre baner til energiminimering i applikationer, der involverer UAV-aktiveret trådløs kommunikation med latensbegrænsninger. Ud over, deres arbejde kunne bane vejen for fremtidige undersøgelser med henblik på at udvikle nye værktøjer til at forbedre ydeevnen af UAV-kommunikationsnetværk.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Game of drones:Lufthavne samler virksomheder for at bekæmpe truslen ovenfraMere end en gener, droner, der flyver ved lufthavne, udgør en reel fare, da de kan forårsage en dødelig ulykke, hvis de bliver suget ind i et flys motor En quadcopter drone vises på radarskærmen o
Game of drones:Lufthavne samler virksomheder for at bekæmpe truslen ovenfraMere end en gener, droner, der flyver ved lufthavne, udgør en reel fare, da de kan forårsage en dødelig ulykke, hvis de bliver suget ind i et flys motor En quadcopter drone vises på radarskærmen o -
 Fyrtårn:Hjemmeskærm er én smart vagtpostEn smart hjemmeenhed, der fungerer som et sikkerhedskamera, leverer service, der går ud over husets vagtpost. Hvad hvis du finder en hjemmeenhed, der ikke kun fungerer som vagtpost, men også fungerer
Fyrtårn:Hjemmeskærm er én smart vagtpostEn smart hjemmeenhed, der fungerer som et sikkerhedskamera, leverer service, der går ud over husets vagtpost. Hvad hvis du finder en hjemmeenhed, der ikke kun fungerer som vagtpost, men også fungerer -
 Er du en Tinder eller en Bumble type person? Stor dating klichéerKredit:CC0 Public Domain Fra den måde, vi tæller vores skridt til de foranstaltninger, vi tager for at blive bemærket online, Silicon Valley har forvandlet hverdagen for den gennemsnitlige amerika
Er du en Tinder eller en Bumble type person? Stor dating klichéerKredit:CC0 Public Domain Fra den måde, vi tæller vores skridt til de foranstaltninger, vi tager for at blive bemærket online, Silicon Valley har forvandlet hverdagen for den gennemsnitlige amerika -
 Frankrig vil køre førerløse hovedbanetog inden for fem årSnart er der ikke en chauffør til at vinke ud ad vinduet Den franske jernbaneoperatør SNCF sagde onsdag, at den planlægger at introducere prototyper af førerløse hovedbanetog til passagerer og god
Frankrig vil køre førerløse hovedbanetog inden for fem årSnart er der ikke en chauffør til at vinke ud ad vinduet Den franske jernbaneoperatør SNCF sagde onsdag, at den planlægger at introducere prototyper af førerløse hovedbanetog til passagerer og god
- Elektrokemisk fremstillet ammoniak kan revolutionere fødevareproduktionen
- Forskere udvikler sikrere elektrolytter og bruger ny teknik til at vurdere dem
- Maskinlæring forbedrer lys-stof-interaktioner i dielektriske nanostrukturer
- Plasmoniske pionerer skyder væk i kamp om lyset
- Ny type kosmisk støv i meteorit kan afsløre oprindelsen af vand på Jorden
- Forskelle i et almindeligt luftforurenende stof er synlige fra rummet