


RoboBee drevet af bløde muskler
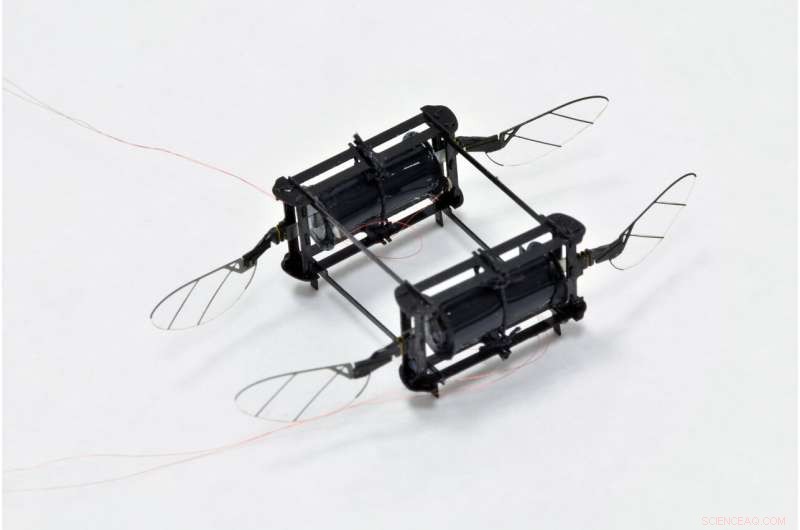
En firefløjet, model med to aktuatorer kunne flyve i et rodet miljø, overvinde flere kollisioner i en enkelt flyvning. Kredit:Harvard Microrobotics Lab
Synet af en RoboBee, der bevæger sig mod en væg eller styrter ind i en glaskasse, kan engang have udløst panik hos forskerne i Harvard Microrobotics Laboratory ved Harvard John A. Paulson School of Engineering and Applied Science (SEAS), men ikke mere.
Forskere ved SEAS og Wyss Institute for Biologically Inspired Engineering har udviklet en elastisk RoboBee drevet af bløde kunstige muskler, der kan støde ind i vægge, falder på gulvet, og kolliderer med andre RoboBees uden at blive beskadiget. Det er den første mikrorobot drevet af bløde aktuatorer til at opnå kontrolleret flyvning.
"Der har været et stort skub inden for mikrorobotik for at lave mobile robotter ud af bløde aktuatorer, fordi de er så modstandsdygtige, " sagde Yufeng Chen, en tidligere kandidatstuderende og postdoc-stipendiat ved SEAS og førsteforfatter til papiret. "Imidlertid, mange mennesker i feltet har været skeptiske over, at de kunne bruges til flyvende robotter, fordi effekttætheden af disse aktuatorer simpelthen ikke har været høj nok, og de er notorisk svære at kontrollere. Vores aktuator har høj nok effekttæthed og kontrollerbarhed til at opnå svæveflyvning."
Forskningen er publiceret i Natur .
For at løse problemet med effekttæthed, forskerne byggede på de elektrisk drevne bløde aktuatorer udviklet i David Clarkes laboratorium, den udvidede Tarr-familie professor i materialer. Disse bløde aktuatorer er lavet ved hjælp af dielektriske elastomerer, bløde materialer med gode isolerende egenskaber, der deformeres, når et elektrisk felt påføres.
Ved at forbedre elektrodens ledningsevne, forskerne var i stand til at betjene aktuatoren ved 500 Hertz, på niveau med de stive aktuatorer, der tidligere blev brugt i lignende robotter.
En anden udfordring, når man har at gøre med bløde aktuatorer, er, at systemet har en tendens til at bøje og blive ustabilt. For at løse denne udfordring, forskerne byggede et letvægtsfly med et stykke lodret begrænsningstråd for at forhindre aktuatoren i at bukke.
De bløde aktuatorer kan nemt samles og udskiftes i disse små robotter. For at demonstrere forskellige flyveevner, forskerne byggede flere forskellige modeller af den bløde RoboBee. En to-fløjet model kunne lette fra jorden, men havde ingen yderligere kontrol. En firefløjet, model med to aktuatorer kunne flyve i et rodet miljø, overvinde flere kollisioner i en enkelt flyvning.
"En fordel ved småskala, lavmasserobotter er deres modstandsdygtighed over for eksterne påvirkninger, " sagde Elizabeth Farrell Helbling, en tidligere kandidatstuderende ved SEAS og en medforfatter på papiret. "Den bløde aktuator giver en ekstra fordel, fordi den kan absorbere stød bedre end traditionelle aktiveringsstrategier. Dette ville være nyttigt i potentielle applikationer såsom at flyve gennem murbrokker til eftersøgnings- og redningsmissioner."
En ottefløjet, fire-aktuator model demonstreret kontrolleret svæveflyvning, den første til en blødt drevet flyvende mikrorobot.
Næste, forskerne sigter mod at øge effektiviteten af den bløde robot, som stadig halter langt bagefter mere traditionelle flyvende robotter.
"Bløde aktuatorer med muskellignende egenskaber og elektrisk aktivering repræsenterer en stor udfordring inden for robotteknologi, " siger Robert Wood, Charles River professor i ingeniørvidenskab og anvendt videnskab i SEAS, kernefakultetsmedlem af Wyss Institute for Biologically Inspired Engineering og seniorforfatter af papiret. "Hvis vi kunne konstruere højtydende kunstige muskler, himlen er grænsen for, hvilke robotter vi kunne bygge."
Sidste artikelBedre autonom ræsonnement i vanskelige vejkryds
Næste artikelDesign af ubemandede luftfartøjsbaner til energiminimering
 Varme artikler
Varme artikler
-
 Southwest forsinker genoptagelsen af Boeing 737 MAX-flyvningerSouthwest Airlines Boeing 737 MAX fly parkeret i Victorville, Californien Southwest Airlines meddelte torsdag, at de igen vil udsætte genoptagelsen af Boeing 737 MAX-flyvninger til den 6. juni.
Southwest forsinker genoptagelsen af Boeing 737 MAX-flyvningerSouthwest Airlines Boeing 737 MAX fly parkeret i Victorville, Californien Southwest Airlines meddelte torsdag, at de igen vil udsætte genoptagelsen af Boeing 737 MAX-flyvninger til den 6. juni. -
 Mobile enheder slører arbejde og privatliv, hvilket øger cyberrisici, siger QUT-forskerQUTs Dr. Kenan Degirmenci. Kredit:QUT Media Organisationer bevæger sig ikke hurtigt nok med hensyn til cybersikkerhedstrusler knyttet til driften mod at bruge personlige mobile enheder på arbejdsp
Mobile enheder slører arbejde og privatliv, hvilket øger cyberrisici, siger QUT-forskerQUTs Dr. Kenan Degirmenci. Kredit:QUT Media Organisationer bevæger sig ikke hurtigt nok med hensyn til cybersikkerhedstrusler knyttet til driften mod at bruge personlige mobile enheder på arbejdsp -
 Cambridge Analytica brugte vores hemmeligheder til profit – de samme data kunne bruges til offentlig…Hvordan kunne vi bruge den samme strategi, som Cambridge Analytica brugte, bedre? Kredit:AlexandraPopova/Shutterstock Lige siden det blev afsløret, at Cambridge Analytica havde taget data fra 87 m
Cambridge Analytica brugte vores hemmeligheder til profit – de samme data kunne bruges til offentlig…Hvordan kunne vi bruge den samme strategi, som Cambridge Analytica brugte, bedre? Kredit:AlexandraPopova/Shutterstock Lige siden det blev afsløret, at Cambridge Analytica havde taget data fra 87 m -
 Falske nyheder er ikke bare dårlige nyheder - det er dårligt for bundlinjen, ogsåUSC-ekspert Kimon Drakopoulos, der studerer, hvordan falske nyheder spredes, arbejder på et adfærdseksperiment for at studere, hvordan mennesker forbruger og internaliserer information. Kredit:iStock
Falske nyheder er ikke bare dårlige nyheder - det er dårligt for bundlinjen, ogsåUSC-ekspert Kimon Drakopoulos, der studerer, hvordan falske nyheder spredes, arbejder på et adfærdseksperiment for at studere, hvordan mennesker forbruger og internaliserer information. Kredit:iStock