


Hvordan man designer og styrer robotter med stretchy, fleksible kroppe
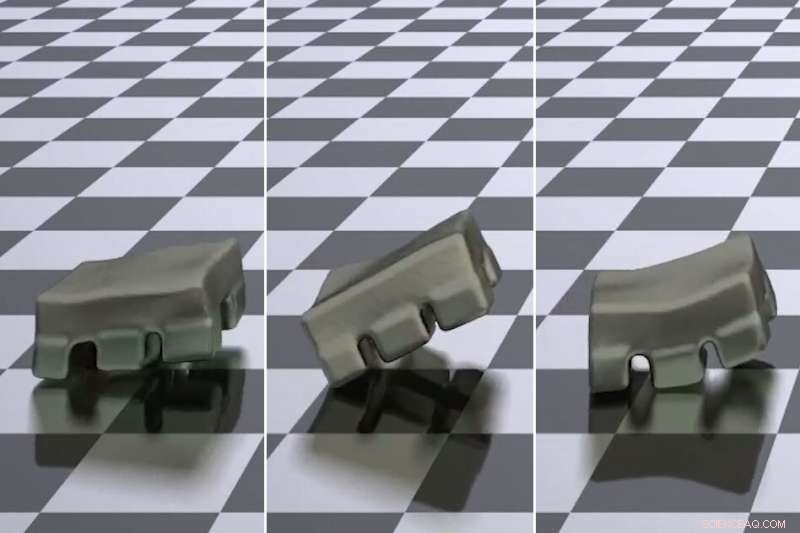
En MIT-opfundet model optimerer effektivt og samtidigt kontrol og design af bløde robotter til målopgaver, som traditionelt har været et monumentalt foretagende inden for beregning. Modellen, for eksempel, var betydeligt hurtigere og mere præcis end avancerede metoder til at simulere, hvordan firbenede robotter (billedet) skulle bevæge sig for at nå måldestinationer. Kredit:Andrew Spielberg, Daniela Rus, Wojciech Matusik, Allan Zhao, Tao Du, og Yuanming Hu
MIT-forskere har opfundet en måde til effektivt at optimere styring og design af bløde robotter til målopgaver, som traditionelt har været et monumentalt foretagende inden for beregning.
Bløde robotter har fjedrende, fleksibel, strækbare kroppe, der i det væsentlige kan bevæge sig et uendeligt antal veje på ethvert givet tidspunkt. Beregningsmæssigt, dette repræsenterer en meget kompleks "statsrepræsentation, " som beskriver, hvordan hver del af robotten bevæger sig. Tilstandsrepræsentationer for bløde robotter kan potentielt have millioner af dimensioner, gør det svært at beregne den optimale måde at få en robot til at udføre komplekse opgaver.
På konferencen om systemer til behandling af neurale oplysninger i næste måned, MIT-forskerne vil præsentere en model, der lærer en kompakt, eller "lavdimensionel, "men alligevel detaljeret statsrepræsentation, baseret på den underliggende fysik af robotten og dens miljø, blandt andre faktorer. Dette hjælper modellen med iterativt at co-optimere bevægelseskontrol og materialedesignparametre, der er tilpasset specifikke opgaver.
"Bløde robotter er uendelig-dimensionelle skabninger, der bøjer sig på en milliard forskellige måder på ethvert givet tidspunkt, "siger første forfatter Andrew Spielberg, en kandidatstuderende i datalogi og kunstig intelligenslaboratorium (CSAIL). "Men, i sandhed, der er naturlige måder, hvorpå bløde genstande sandsynligvis vil bøje sig. Vi finder, at bløde robotteres naturlige tilstande kan beskrives meget kompakt i en lavdimensionel beskrivelse. Vi optimerer kontrol og design af bløde robotter ved at lære en god beskrivelse af de sandsynlige tilstande."
I simuleringer, modellen gjorde det muligt for 2-D og 3-D bløde robotter at udføre opgaver – såsom at flytte bestemte afstande eller nå et målsted – hurtigere og mere præcist end de nuværende avancerede metoder. Forskerne planlægger derefter at implementere modellen i rigtige bløde robotter.
Sammen med Spielberg på papiret er CSAIL-kandidatstuderende Allan Zhao, Tao Du, og Yuanming Hu; Daniela Rus, direktør for CSAIL og Andrew og Erna Viterbi professor i elektroteknik og datalogi; og Wojciech Matusik, en MIT-lektor i elektroteknik og datalogi og leder af Computational Fabrication Group.
"Læring-i-løkken"
Blød robotik er et relativt nyt forskningsfelt, men det lover godt for avanceret robotteknologi. For eksempel, fleksible kroppe kunne tilbyde sikrere interaktion med mennesker, bedre objektmanipulation, og mere manøvredygtighed, blandt andre fordele.
Styring af robotter i simuleringer er afhængig af en "observatør, " et program, der beregner variabler, der ser, hvordan den bløde robot bevæger sig for at fuldføre en opgave. I tidligere arbejde, forskerne nedbrudte den bløde robot til hånddesignede klynger af simulerede partikler. Partikler indeholder vigtig information, der hjælper med at indsnævre robottens mulige bevægelser. Hvis en robot forsøger at bøje på en bestemt måde, for eksempel, aktuatorer kan modstå denne bevægelse nok til, at den kan ignoreres. Men, for så komplekse robotter, manuelt at vælge, hvilke klynger der skal spores under simuleringer, kan være vanskeligt.
At bygge det arbejde videre, forskerne designet en "learning-in-the-loop optimization" metode, hvor alle optimerede parametre læres i løbet af en enkelt feedbackloop over mange simuleringer. Og, samtidig med læringsoptimering - eller "in the loop" - lærer metoden også tilstandsrepræsentationen.
Modellen anvender en teknik kaldet en materialepunktmetode (MPM), som simulerer adfærden af partikler af kontinuum materialer, såsom skum og væsker, omgivet af et baggrundsgitter. Derved, den fanger robotens partikler og dets observerbare miljø i pixels eller 3-D pixels, kendt som voxels, uden behov for yderligere beregning.
I en læringsfase, denne rå partikelgitterinformation føres ind i en maskinlæringskomponent, der lærer at indtaste et billede, komprimere det til en lavdimensionel repræsentation, og dekomprimer repræsentationen tilbage i inputbilledet. Hvis denne "autoencoder" bevarer nok detaljer, mens inputbilledet komprimeres, det kan nøjagtigt genskabe inputbilledet fra komprimeringen.
I forskernes arbejde bl.a. autoencoderens indlærte komprimerede repræsentationer tjener som robottens lavdimensionelle tilstandsrepræsentation. I en optimeringsfase, at komprimeret repræsentation går tilbage i controlleren, som udsender en beregnet aktivering for, hvordan hver partikel i robotten skal bevæge sig i det næste MPM-simulerede trin.
Samtidigt, controlleren bruger denne information til at justere den optimale stivhed for hver partikel for at opnå den ønskede bevægelse. I fremtiden, at materialeinformation kan være nyttig til 3-D-printning af bløde robotter, hvor hver partikelplet kan være trykt med lidt forskellig stivhed. "Dette giver mulighed for at skabe robotdesigns tilpasset robotbevægelserne, som vil være relevante for specifikke opgaver, " siger Spielberg. "Ved at lære disse parametre sammen, du holder alt så synkroniseret så meget som muligt for at gøre designprocessen nemmere."
Hurtigere optimering
Al optimeringsinformation er, på tur, føres tilbage til starten af løkken for at træne autoencoderen. Over mange simuleringer, controlleren lærer den optimale bevægelse og materialedesign, mens autoencoderen lærer den stadig mere detaljerede tilstandsrepræsentation. "Nøglen er, at vi ønsker, at den lavdimensionelle tilstand skal være meget beskrivende, " siger Spielberg.
Når robotten har nået sin simulerede endelige tilstand over en bestemt tidsperiode – for eksempel så tæt som muligt på måldestinationen – den opdaterer en "tabsfunktion". Det er en kritisk komponent i maskinlæring, som forsøger at minimere nogle fejl. I dette tilfælde, det minimerer, sige, hvor langt væk robotten stoppede fra målet. Denne tabsfunktion flyder tilbage til controlleren, som bruger fejlsignalet til at tune alle de optimerede parametre for bedst muligt at fuldføre opgaven.
Hvis forskerne forsøgte at tilføre alle simuleringens rå partikler direkte ind i controlleren, uden kompressionstrinnet, "running and optimization time would explode, " Spielberg says. Using the compressed representation, the researchers were able to decrease the running time for each optimization iteration from several minutes down to about 10 seconds.
The researchers validated their model on simulations of various 2-D and 3-D biped and quadruped robots. They researchers also found that, while robots using traditional methods can take up to 30, 000 simulations to optimize these parameters, robots trained on their model took only about 400 simulations.
Deploying the model into real soft robots means tackling issues with real-world noise and uncertainty that may decrease the model's efficiency and accuracy. Men, in the future, the researchers hope to design a full pipeline, from simulation to fabrication, for soft robots.
 Varme artikler
Varme artikler
-
 Ny kortapplikation visualiserer omkostningerne ved at udvikle vedvarende energiressourcerKort over Solar Photovoltaics (PV) Levelized Cost of Energy (LCOE) i ASEAN-regionen for moderat teknisk potentiale. Kredit:National Renewable Energy Laboratory En ny rapport, Undersøgelse af mulig
Ny kortapplikation visualiserer omkostningerne ved at udvikle vedvarende energiressourcerKort over Solar Photovoltaics (PV) Levelized Cost of Energy (LCOE) i ASEAN-regionen for moderat teknisk potentiale. Kredit:National Renewable Energy Laboratory En ny rapport, Undersøgelse af mulig -
 Vedholdenhed er et centralt træk ved soldrevne Odysseus autonome flyKredit:Aurora Flight Sciences Aurora Flight Sciences forbereder en debutflyvning næste år med sine soldrevne ubemandede fly. Debuten vil levere særlige gaver til forsknings- og overvågningsindsats
Vedholdenhed er et centralt træk ved soldrevne Odysseus autonome flyKredit:Aurora Flight Sciences Aurora Flight Sciences forbereder en debutflyvning næste år med sine soldrevne ubemandede fly. Debuten vil levere særlige gaver til forsknings- og overvågningsindsats -
 Træk kan løfte fugle til nye højder, finder forskereSensorer og højhastighedskameraer måler papegøjen Garys kræfter, da han letter og lander mellem to siddepinde. Kredit:Diana Chin Fremtidens luftdesign skylder måske et nikk tak takket være fem pap
Træk kan løfte fugle til nye højder, finder forskereSensorer og højhastighedskameraer måler papegøjen Garys kræfter, da han letter og lander mellem to siddepinde. Kredit:Diana Chin Fremtidens luftdesign skylder måske et nikk tak takket være fem pap -
 Materiale kan hjælpe vinduer med både at drive dit hjem og kontrollere dets temperaturKredit:Cell Press Miljøvenlige byggetrends har øget populariteten af vinduesbelægninger, der holder varme- og køleomkostningerne nede ved at blokere unødvendige dele af sollys. De har også inspi
Materiale kan hjælpe vinduer med både at drive dit hjem og kontrollere dets temperaturKredit:Cell Press Miljøvenlige byggetrends har øget populariteten af vinduesbelægninger, der holder varme- og køleomkostningerne nede ved at blokere unødvendige dele af sollys. De har også inspi