


Flexoskelet print:Fremstilling af fleksible eksoskeletter til insekt-inspirerede robotter
Kredit:Jiang, Zhou &Gravish.
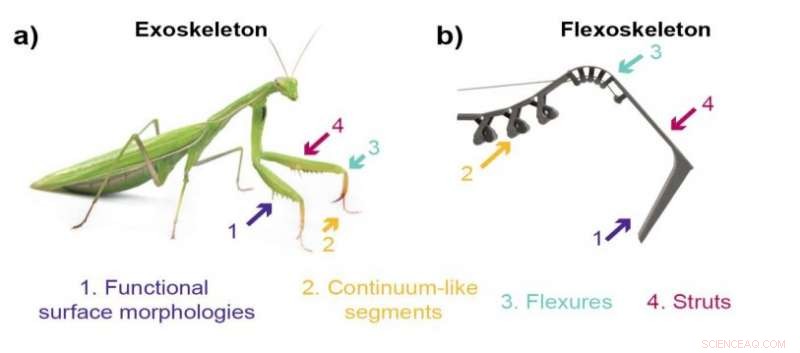
Insekter har typisk en række komplekse eksoskeletstrukturer, som støtter dem i deres bevægelser og hverdagsaktiviteter. Fremstilling af kunstige eksoskeletter til insekt-inspirerede robotter, der matcher kompleksiteten af disse naturligt forekommende strukturer, er en nøgleudfordring inden for robotteknologi.
Selvom forskere har foreslået adskillige fremstillingsprocesser og -teknikker til fremstilling af eksoskeletter til insekt-inspirerede robotter, mange af disse metoder er ekstremt komplekse eller er afhængige af dyrt udstyr og materialer. Dette gør dem umulige og vanskelige at anvende i en bredere skala.
Med det i tankerne, forskere ved University of California i San Diego har for nylig udviklet en ny proces til at designe og fremstille komponenter til insekt-inspirerede robotter med eksoskeletstrukturer. De introducerede denne proces, kaldet flexoskelet print, i et papir forudgivet på arXiv.
"Inspireret af insektets eksoskelet, vi præsenterer en ny fremstillingsproces kaldet 'flexoskeleton' print, der muliggør hurtig og tilgængelig fremstilling af hybride stive/bløde robotter, " skrev forskerne i deres papir.
Indtil nu, hybridrobotter med både stive og bløde komponenter er typisk blevet bygget ved hjælp af dyre materialer og 3D-printere, samt flertrins støbe- og maskinprocesser. I deres undersøgelse, forskerholdet ved UC San Diego satte sig for at skabe en ny fremstillingsmetode, der er billigere og nemmere at bruge.
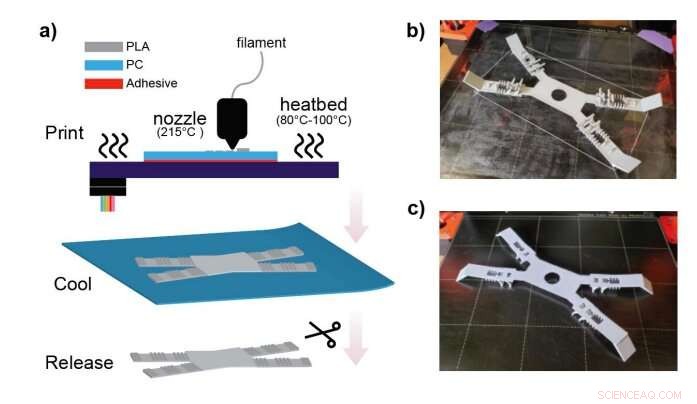
a) En figur, der forklarer, hvordan den trykproces, som forskerne introducerede, fungerer. b) En firbenet robot skabt ved hjælp af forskernes metode, umiddelbart efter udskrivning på klart pc-lag. c) Den firbenede robot efter frigivelse fra PC-laget. Kredit:Jiang, Zhou &Gravish.
Flexoskelet print, metoden de udviklede, er afhængig af en tilpasning af en 3D-printer med smeltet aflejringsmateriale (FDM) af forbrugerkvalitet, som giver en ekstrem stærk bindingsstyrke mellem det aflejrede materiale og printerens fleksible bundlag. Denne proces kan bruges til at skabe eksoskeletter til insekt-inspirerede robotter med forskellige former og morfologier.
Bemærkelsesværdigt, den fabrikationstilgang, som forskerne foreslår, kan bruges af både nybegyndere og ekspertbrugere, da det er ret ligetil og let at forstå. Det er også langt mere overkommeligt end alternative fremstillingsmetoder, da de materialer og udstyr, den er afhængig af, er betydeligt billige og let tilgængelige.
I deres undersøgelse, holdet demonstrerede gennemførligheden af deres tilgang ved at bruge den til at designe og teste en lang række kanoniske flexoskeletelementer. De kombinerede derefter alle de elementer, de producerede, til en gående firbenet robot med en fleksibel eksoskeletstruktur.
"Den tilgang, vi har udviklet, afhænger i høj grad af sammenhængen mellem tredimensionel geometri af overfladeegenskaber og deres bidrag til den komponents lokale mekaniske egenskaber, " skrev forskerne i deres papir. "Vi forestiller os, at denne metode vil muliggøre en ny klasse af bio-inspirerede robotter med fokus på det indbyrdes forhold mellem mekanisk design og bevægelse."
I fremtiden, den nye design- og fremstillingsproces, der er udtænkt af dette team af forskere, kan muliggøre udviklingen af adskillige insekt-inspirerede robotter. Da teknikken er langt mere ligetil og overkommelig end de fleste eksisterende metoder, det kan også gøre eksisterende eller nye robotter nemmere at opskalere, øge deres chancer for at blive produceret i større mængder og komme på markedet.
© 2019 Science X Network
Sidste artikelACLU til politiet, der bruger robotter:Fortæl os mere
Næste artikelBerlin lufthavn åbner i 2020 efter ni års forsinkelse
 Varme artikler
Varme artikler
-
 Datacenterforstærkere håber, at nye skatteincitamenter stopper blødningen, holde tekniske websted…Kredit:CC0 Public Domain Illinois lovgivere godkendte et datacenter skatteincitament tilhængere siger kunne få tech giganter og andre virksomheder til at tænke to gange om at placere deres datalag
Datacenterforstærkere håber, at nye skatteincitamenter stopper blødningen, holde tekniske websted…Kredit:CC0 Public Domain Illinois lovgivere godkendte et datacenter skatteincitament tilhængere siger kunne få tech giganter og andre virksomheder til at tænke to gange om at placere deres datalag -
 Forskere bruger AI til at tilføje 4-D-effekter til filmFjerde års computeringeniør Yuhao Zhou (højre) og U fra T postdoktor Makarand Tapaswi bruger neurale netværk til at automatisere ældre film til 4-D filmoplevelser. Kredit:Ryan Perez James Camerons
Forskere bruger AI til at tilføje 4-D-effekter til filmFjerde års computeringeniør Yuhao Zhou (højre) og U fra T postdoktor Makarand Tapaswi bruger neurale netværk til at automatisere ældre film til 4-D filmoplevelser. Kredit:Ryan Perez James Camerons -
 De apps, der kan fortælle dig, om du køber bæredygtigtBæredygtighed betyder forskellige ting for forskellige mennesker, siger forskere. Kredit:Lars Plougmann, licenseret under CC BY-SA 2.0 Hvordan ser bæredygtig shopping ud? Fra miljøpåvirkning til a
De apps, der kan fortælle dig, om du køber bæredygtigtBæredygtighed betyder forskellige ting for forskellige mennesker, siger forskere. Kredit:Lars Plougmann, licenseret under CC BY-SA 2.0 Hvordan ser bæredygtig shopping ud? Fra miljøpåvirkning til a -
 Nyttigt eller uhyggeligt? Maskiner foreslår Gmail-svarDenne 20. marts, 2018, filbillede viser Gmail-appen på en iPad i Baltimore. Google går på grænsen mellem at hjælpe dig med at spare tid og at krybe dig ud, når det henvender sig til maskiner til at fo
Nyttigt eller uhyggeligt? Maskiner foreslår Gmail-svarDenne 20. marts, 2018, filbillede viser Gmail-appen på en iPad i Baltimore. Google går på grænsen mellem at hjælpe dig med at spare tid og at krybe dig ud, når det henvender sig til maskiner til at fo
- To faktorer, der påvirker, hvor meget tyngdekraft der er på et objekt
- En masseudvandring fra Californien? Ikke nøjagtigt, siger ny undersøgelse
- Kobberbundede aflejringer
- Sådan beregnes firkantede fødder på et rektangel
- Undersøgelse viser, at en tredjedel af latinoerne siger, at de har oplevet diskrimination i deres j…
- ORNL hold med Los Alamos, EPB for at demonstrere næste generations netsikkerhedsteknologi