


Et IKEA-møbelmonteringsmiljø til at træne robotter i komplekse manipulationsopgaver
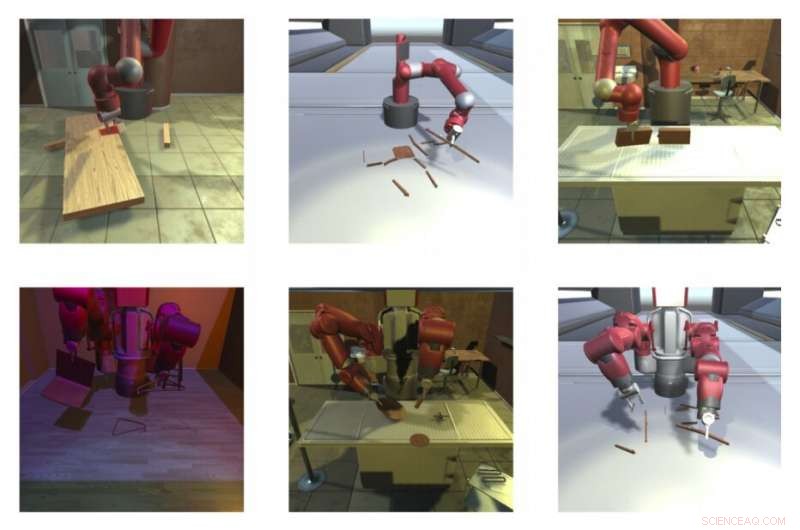
Skærmbilleder af IKEA møbelmonteringsmiljøet. Kredit:Lee et al.
For at udføre komplekse daglige opgaver såsom brug af udstyr, madlavning eller bygning af møbler, robotter skal være i stand til at planlægge deres handlinger og manipulere genstande i deres omgivelser. Indtil nu, imidlertid, lære robotter at udføre komplicerede opgaver, såsom dem, der kræver planlægning over en længere periode, har vist sig at være ret udfordrende, også på grund af mangel på pålidelige simulerede miljøer at teste dem i.
Med det i tankerne, forskere ved University of Southern Carolina har for nylig udviklet IKEA møbelmonteringsmiljøet, en simuleringsplatform, hvor forskere kan teste kunstig intelligens (AI) agenter på komplekse manipulationsopgaver. I det miljø, de udviklede, præsenteret i et papir, der er forudgivet på arXiv, agenter kan evalueres på en række forskellige manipulationsopgaver, der involverer bygning og manipulation af forskellige møbler.
"Miljøet er designet til at fremme forstærkende læring fra simple legetøjsopgaver til komplekse opgaver, der kræver både langsigtet planlægning og sofistikeret kontrol på lavt niveau, " skrev forskerne i deres papir.
At samle møbler kan være en udfordrende opgave selv for mennesker, da det typisk kræver både langsigtet planlægning og sofistikerede manipulationsevner. Miljøet udviklet af forskerne, som er ret nem at bruge, har flere interessante funktioner. Da det genererer en stor mængde syntetisk mærkede data, den kan bruges til at træne computervisionsmodeller til en lang række opgaver, inklusive estimering af objektets stilling, sceneforståelse, og mange flere, uden at kræve menneskeannoterede data.
Ud over, miljøet kunne tjene som benchmark for maskinlæringsmetoder designet til møbelmontering eller andre manipulationsopgaver med lang horisont, forbedre deres kontrol- og planlægningsevner. Interessant nok, de visuelle og interaktive data produceret af platformen kan også bruges til at erhverve domænespecifik viden til andre applikationer, såsom intuitive fysikmodeller.
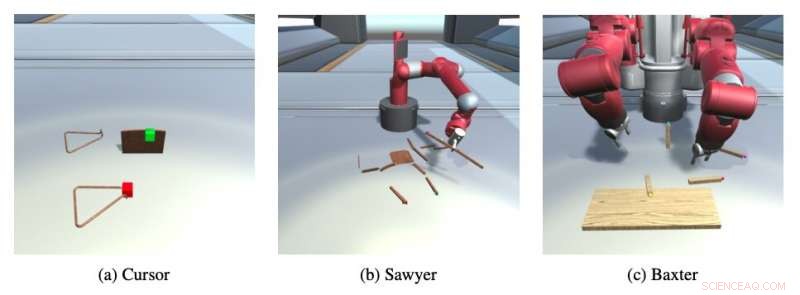
De tre robotter, der i øjeblikket understøttes af platformen. Kredit:Lee et al.
IKEA møbelmonteringsmiljøet understøtter over 80 møbelmodeller og kan tilpasses med baggrundsbilleder, belysning og teksturer. Det kunne i sidste ende ses som et testbed for maskinlæringsteknikker designet til at give robotter avancerede objektmanipulationsfærdigheder.
Indtil nu, miljøet kan bruges til at træne eller teste tre robotter i forskellige former og størrelser, kaldet markør, Sawyer og Baxter. I næste opdatering, imidlertid, forskerne planlægger også at tilføje støtte til Fetch, UR, Jaco og andre populære robotter.
I fremtiden, dette brugerdefinerbare miljø kunne åbne op for nye muligheder for træning og evaluering af talrige maskinlæringsteknikker til robotapplikationer. I mellemtiden, forskerne planlægger at opdatere platformen og forbedre nogle af dens funktioner.
For eksempel, de vil gerne tilføje understøttelse af 3-D bevægelsesenheder, giver brugerne mulighed for at fjernbetjene robotter og lave demonstrationsvideoer ved hjælp af en VR-controller eller 3-D-mus. Disse demonstrationsvideoer kan derefter bruges til at træne maskinlæringsmodeller, ved at bruge en strategi kendt som imitationslæring.
I fremtidige versioner af platformen, brugere kunne også få lov til at vejlede robotter via talte instruktioner, og måske endda være i stand til at træne flere agenter samtidigt. I øvrigt, robotter kunne i sidste ende blive trænet i, hvordan man bruger specifikke værktøjer, såsom skruetrækkere og hamre.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Maskintale:Overladt til deres egne enheder, computere kan finde ud af detVed at bruge nye maskinlæringsteknikker, et forskerhold fra Oak Ridge National Laboratory underviser i elektroniske enheder, hvordan man taler for sig selv. Kredit:Jason Richards/Oak Ridge National La
Maskintale:Overladt til deres egne enheder, computere kan finde ud af detVed at bruge nye maskinlæringsteknikker, et forskerhold fra Oak Ridge National Laboratory underviser i elektroniske enheder, hvordan man taler for sig selv. Kredit:Jason Richards/Oak Ridge National La -
 På vej til intelligente mikrorobotterScanningselektronmikroskopbilledet viser den fuglelignende konstruktion med arrangementer af nanoskala magneter. Magneterne kan magnetiseres i forskellige retninger parallelt med farvebjælkerne. Ved a
På vej til intelligente mikrorobotterScanningselektronmikroskopbilledet viser den fuglelignende konstruktion med arrangementer af nanoskala magneter. Magneterne kan magnetiseres i forskellige retninger parallelt med farvebjælkerne. Ved a -
 Ny ramme gør AI-systemer mere gennemsigtige uden at ofre ydeevnenKredit:CC0 Public Domain Forskere foreslår en ramme for kunstig intelligens (AI), der vil give brugerne mulighed for at forstå rationalet bag AI-beslutninger. Arbejdet er vigtigt, givet push-bevæg
Ny ramme gør AI-systemer mere gennemsigtige uden at ofre ydeevnenKredit:CC0 Public Domain Forskere foreslår en ramme for kunstig intelligens (AI), der vil give brugerne mulighed for at forstå rationalet bag AI-beslutninger. Arbejdet er vigtigt, givet push-bevæg -
 I stigende grad menneskelignende robotter udløser fascination og frygtEn kilde til kontroverser, der blandt andet skyldes frygt for menneskelig beskæftigelse, tilstedeværelsen af robotter i vores daglige liv er ikke desto mindre uundgåelig, siger ingeniører Med en
I stigende grad menneskelignende robotter udløser fascination og frygtEn kilde til kontroverser, der blandt andet skyldes frygt for menneskelig beskæftigelse, tilstedeværelsen af robotter i vores daglige liv er ikke desto mindre uundgåelig, siger ingeniører Med en
- Computer science college seniorer i USA klarer sig bedre end jævnaldrende i Kina, Indien og Rusland…
- Sådan konverteres GPM til KPPH
- Fleksibel, stabil og potent mod kræft - ny tilgang til tumorbehandling
- Fiat Chrysler betaler en bøde på 40 millioner dollars for vildledende salgstal
- Folk foretrækker månedlige betalinger i multipla af $100, selv når det kan koste dem penge
- Brygget kaffegrums tilbyder et bæredygtigt alternativ til farvestof til tøj