


Ingeniører viser, hvordan en autonom, drifting DeLorean kan forbedre førersikkerheden

MARTY, den autonome drivende DeLorean. Kredit:Jonathan Goh
Da DeLorean rullede til standsning, og skyen af dækrøg forsvandt, Jon Goh kiggede ud af splinten af vinduet i passagersiden for at se snesevis af forsamlede tilskuere juble og high-fiving den vellykkede test.
Publikum, og forventning, havde bygget hele eftermiddagen, mens Goh, en nylig maskiningeniør Ph.D. uddannet fra Stanford, havde skitseret en kilometer lang forhindringsbane i trafikkegler ved Thunderhill Raceway i det nordlige Californien. Solen gik hurtigt ned, men Goh og hans co-pilot, en anden studerende ved navn Tushar Goel, kunne ikke vente til morgen med at tage et skud på den snoede bane. Udover, MARTY, føreren, behøvede ikke at se sporet – det behøvede kun GPS-koordinater og algoritmerne på Gohs bærbare computer for at kortlægge sin vej.
MARTY er en DeLorean fra 1981, som Goh og hans kolleger ved Stanfords Dynamic Design Lab konverterede til en helelektrisk, autonom driftbil. Fire år siden, MARTY drev - kørestilen, hvor bilen bevæger sig fremad, selvom den peger sidelæns - gennem sine første donuts med umenneskelig præcision. Siden da, Goh og teamet har haft travlt med at svejse og kode for at forberede MARTY til at anvende de grundlæggende drifting-færdigheder på et intenst kørekursus, og utroligt alt havde fungeret perfekt. MARTY skreg sig vej gennem sving og hurtige zigs og zags på bare et par minutter, sparker røg og gummistykker op, uden at hakke en eneste kegle langs banen.
Mens jubelen fortsatte, tilfredshed skyllet over Goh. At gennemføre "MARTYkhana" kurset i det første forsøg var fantastisk, men han vidste, at de unikke data, der blev hentet fra løbeturen, kunne ændre mulighederne for autonome køresystemer, der findes i biler i dag.
At gå ud over grænserne for at få kontrol
MARTYkhana - et riff på "gymkhana" autocross-racing-formatet, der betragtes som mesterprøven af en kørers evner - er næppe et stunt. Udførelse af forskning i højhastighed, komplicerede køreforhold som dette er en brød-og-smør tilgang fra Dynamic Design Lab, hvor maskiningeniør Chris Gerdes og hans elever styrer autonome biler ind i udfordrende køresituationer, som kun de bedste menneskelige chauffører kan håndtere pålideligt. Indbyggede computere måler bilens respons over dusinvis af kørsler, og ingeniørerne oversætter disse køretøjsdynamikker til software, der en dag kan hjælpe din bil hurtigt med at undvige en fodgænger, der kører ind på vejen.
De fleste automatiserede køretøjer på vejen er designet til at håndtere enklere tilfælde af kørsel, såsom at blive i en vognbane eller holde den rigtige afstand til andre biler.
"Vi forsøger at udvikle automatiserede køretøjer, der kan håndtere nødmanøvrer eller glatte overflader som is eller sne, " sagde Gerdes. "Vi vil gerne udvikle automatiserede køretøjer, der kan bruge al friktionen mellem dækket og vejen til at få bilen ud af skade. Vi ønsker, at bilen skal være i stand til at undgå enhver ulykke, der kan undgås inden for fysikkens love."
At træne en autonom bil til at drive er en overraskende god metode til at teste en bils evne til at køre undvigende. Under typiske forhold, en chauffør peger bilen derhen, hvor de vil hen og bruger speederen og bremsepedalerne til at styre hastigheden. Når man driver, hvad enten det er med vilje eller ej, dette går ud af vinduet.
"Pludselig peger bilen i en helt anden retning, end hvor den skal hen. Dit rat styrer hastigheden, gashåndtaget påvirker rotationen, og bremserne kan påvirke, hvor hurtigt du skifter retning, "Goh sagde." Du er nødt til at forstå, hvordan du bruger disse velkendte input på en helt anden måde til at styre bilen, og de fleste bilister er bare ikke særlig gode til at håndtere bilen, når den bliver så ustabil."

Overlejrede rammer, med 0,5 sekunders mellemrum, fra en overheadvideo af en vellykket, fuldt autonomt "Figur 8" drivende eksperiment på MARTY. Dette eksperiment udføres ved hastigheder på 50 km/t, og overgange gennem +/- 40 graders sideslip på cirka et sekund. Kredit:Jonathan Goh
Erhvervskøretøjer er udstyret med elektroniske stabilitetskontrolsystemer, der forsøger at forhindre biler i at komme ind i disse ustabile stater, men det er her, driftere trives. De udnytter denne ustabilitet til at manøvrere bilen på mere adrætte og præcise måder, der giver dem mulighed for at svide sig gennem en smal forhindringsbane uden så meget som at græsse barriererne.
Ved at studere vanerne hos professionelle chauffører og teste de samme kontrolmanøvrer i MARTY, Stanford -teamet har gjort det muligt for bilen at bruge en større række af sine fysiske grænser for at opretholde stabilitet gennem en bredere vifte af forhold, og den involverede matematik kunne tillade autonome systemer at manøvrere med en drift racers smidighed i nødstilfælde.
"Gennem at drive, vi er i stand til at komme til ekstreme eksempler på kørefysik, som vi ellers ikke ville "Sagde Goh." Hvis vi kan erobre, hvordan vi sikkert kan styre bilen i de mest stabile og de mest ustabile scenarier, det bliver lettere at forbinde alle prikkerne imellem. "
En grundforvandling
Da Gerdes og Goh satte sig for at bygge MARTY-som står for Multiple Actuator Research Test-seng til Yaw-kontrol-vidste de, at de ville have en bil med baghjulstræk, der ville give frihed til endeløse opgraderinger, og de ønskede, at det skulle have en vis cool faktor.
"Sådan vi ser det, hvis du skal bygge et forskningsmiddel, hvorfor ikke gøre det med en vis stil?" Gerdes kan lide at sige, nikker til den klassiske linje fra Tilbage til Fremtiden.
En DeLorean afkrydsede alle disse felter. Hvis du skulle se under MARTYs ikoniske skal i rustfrit stål, du vil finde meget lidt DeLorean på dette tidspunkt. Den underdrevne drivlinje er blevet erstattet af kraftige batterier og elektriske motorer udviklet af Renovo. Den originale affjedring var for squishy til at holde en anstændig drift, så teamet designede og fremstillede komponenter, der kunne klare opgaven. Mekaniske kontroller til styring, bremsning og drosling blev erstattet af elektroniske systemer. Der er et rullebur.
Et par GPS-antenner prikker taget og sporer bilens placering inden for en tomme, og hele operationen kører på computere gemt bag sæderne. Indtastning af kursuslayout, MARTY beregner den glatteste afdriftsrute på få sekunder. Det tager langt længere tid at sætte trafikkeglerne op.
Kører som et menneske
Det første MARTY-relaterede tidsskriftsartikel blev for nylig offentliggjort og definerer det system, som bilen bruger til at kontrollere sin vinkel og position præcist under grundlæggende driftforhold. Controllerdesignet var langt mere ligetil end forventet, Goh sagde, og er åben adgang for at give andre mulighed for at gentage tilgangen.
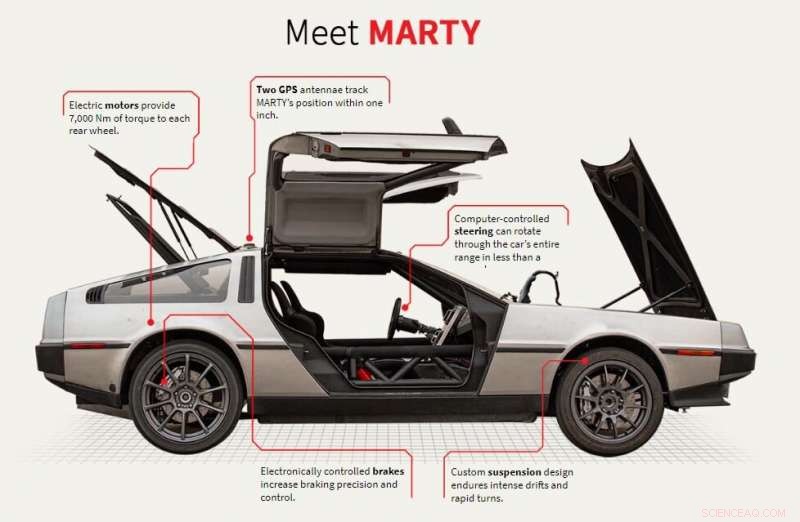
Kredit:Infographic af Yvonne Tang; originalt foto af Jonathan Goh
Andre papirer i værkerne vil detaljere de teknikker, holdet udviklede, der bruger bilens fulde styreområde, hvilket er det, der gør det muligt at gennemføre mere komplicerede ruter, såsom MARTYkhana. Og teamet fortsætter med at eksperimentere med, hvordan inkorporering af for- og bagbremser kan åbne op for endnu flere muligheder for det autonome system. Alt i alt, dette arbejde gør det muligt for MARTY at gøre skarpere sving i træk endnu hurtigere, som yderligere vil hjælpe med at træne den til at navigere i ekstreme forhold.
"Resultaterne indtil videre er ret fremragende, " sagde Gerdes. "Stabilitetskontrolsystemerne i moderne biler begrænser førerens kontrol til et meget snævert område af bilens potentiale. Med MARTY har vi været i stand til bredere at definere rækken af forhold, hvorunder vi kan arbejde sikkert, og vi har evnen til at stabilisere bilen under disse ustabile forhold."
Drifting er lige så meget en kunstform som en teknisk færdighed, en detalje, Gerdes har lagt vægt på siden begyndelsen. Det er derfor, han vil skylle over, hvor imponeret han er over, at hans elever har programmeret MARTY til at køre på niveau med professionelle chauffører.
"Det er virkelig imponerende, hvor hurtig bilen kan lave disse overgange, og også hvor præcis den kunne være, sagde Fredric Aasbo, verdensmesteren i Formel Drift i 2015. "Fordi det er tricket som chauffør. Det er det, vi alle prøver at finde ud af."
 Varme artikler
Varme artikler
-
 Spionchefen ønskede forbud mod kinesisk telekommunikation fra australsk 5GI denne 26. sept. 2018, Foto, besøgende går forbi en skærm fra det kinesiske teknologifirma ZTE på PT Expo i Beijing. En spionchef sagde i en tale offentliggjort tirsdag, 30. okt. 2018, at Australiens
Spionchefen ønskede forbud mod kinesisk telekommunikation fra australsk 5GI denne 26. sept. 2018, Foto, besøgende går forbi en skærm fra det kinesiske teknologifirma ZTE på PT Expo i Beijing. En spionchef sagde i en tale offentliggjort tirsdag, 30. okt. 2018, at Australiens -
 Digital afhængighed – hvordan teknologi holder os hookedDer er en række grunde til, at du ikke kan komme væk fra din skærm. Kredit:shutterstock Verdenssundhedsorganisationen skal inkludere spilforstyrrelse, manglende evne til at stoppe med at spille, i
Digital afhængighed – hvordan teknologi holder os hookedDer er en række grunde til, at du ikke kan komme væk fra din skærm. Kredit:shutterstock Verdenssundhedsorganisationen skal inkludere spilforstyrrelse, manglende evne til at stoppe med at spille, i -
 Frankrig går videre med digital skat fra den 1. januarFrankrig har kørt hårdt for en ny såkaldt GAFA-skat - opkaldt efter Google, Æble, Facebook og Amazon – for at sikre, at de globale giganter betaler en rimelig andel af skat på deres massive forretning
Frankrig går videre med digital skat fra den 1. januarFrankrig har kørt hårdt for en ny såkaldt GAFA-skat - opkaldt efter Google, Æble, Facebook og Amazon – for at sikre, at de globale giganter betaler en rimelig andel af skat på deres massive forretning -
 Sådan køber du en elbilDette udaterede billede leveret af GM viser 2019 Chevrolet Bolt, en elbil, der får 238 miles rækkevidde på en opladning. (Jessica Lynn Walker/GM via AP) Selvom elbiler kun udgør en brøkdel af det
Sådan køber du en elbilDette udaterede billede leveret af GM viser 2019 Chevrolet Bolt, en elbil, der får 238 miles rækkevidde på en opladning. (Jessica Lynn Walker/GM via AP) Selvom elbiler kun udgør en brøkdel af det
- Hvide dværgstjerners dannelse af affaldsskiver er forsinket
- NASA analyserer koncentrationen af vanddampen Tropical Cyclone Cristinas
- Fem masseudryddelser - og hvad vi kan lære af dem om planeten i dag
- Elektrisk fast drivmiddel:Kan det tage varmen?
- Fremtiden for elektronik er elastisk
- Hvordan man laver slime uden borax eller flydende stivelse