


Fodgængere:En tobenet robot, der tilpasser sin gangstil som reaktion på miljøændringer

Fodgængere, den tobenede robot udviklet af forskerne, krydser gaden ved siden af en menneskelig bruger. Kredit:Ahmad et al.
Mennesker er generelt i stand til at tilpasse deres gåstil baseret på det miljø, de bevæger sig i, for eksempel, fremskynde, hvis jordens konsistens under deres fødder tillader det, bremse, når gulvet er glat, ændre retning for at undgå vandpytter eller huller i jorden, og så videre. For at navigere i en række forskellige miljøer, robotter skal kunne tilpasse deres gangadfærd på lignende måde, tilpasse deres struktur som reaktion på miljøændringer.
Med det i tankerne, Forskere ved Osaka University i Japan har for nylig skabt PedestriANS, en tobenet robot, der kan ændre nogle af de fysiske egenskaber og bevægelser af sine ben som reaktion på ændringer i dets omgivende miljø. Denne nye robot, præsenteret i et papir offentliggjort i SAGEs tidsskrift Adaptiv adfærd , kan ændre sin gåstil ved hjælp af et simpelt system, der forbinder bevægelserne og konfigurationen af sine to ben.
"Hovedformålet med vores arbejde er at udvikle robuste robotter, der kan håndtere forstyrrelser; robotter, der kan ledsage mennesker og gå effektivt over jævnt terræn såvel som ujævnt som græs og grus, "Huthaifa Ahmad, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "For at nå dette mål, vi skal udvikle robotsystemer med en adaptiv morfologi; fordi selv med de fleste avancerede bipedale robotter, der er tilgængelige i disse dage, at have en præcis model af både robotkroppen og miljøet er afgørende for, at de kan fungere korrekt."
Fodgængere, robotten udviklet af Ahmad og hans kolleger, er afhængig af et aktuatornetværkssystem (ANS), et designkoncept introduceret i deres tidligere arbejde. I deres tidligere studier, forskerne inkorporerede det samme koncept i flere andre applikationer, inklusive robotrygsøjler, arme og flerbenede robotter.
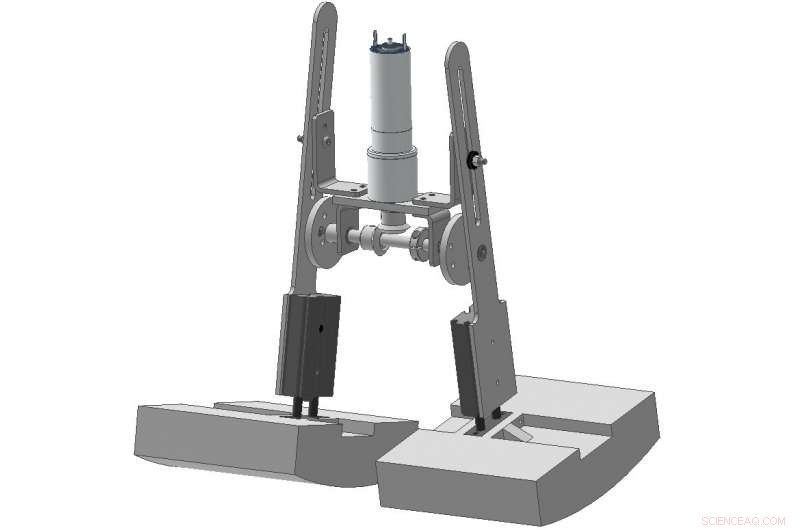
En illustration af fodgængere. Kredit:Ahmad et al.
"Som dets gennemførlighed blev påvist i flere undersøgelser, Jeg bruger i øjeblikket ANS-princippet i min forskning for at opnå tilpasningsdygtige robotter, ved at udnytte de forskellige interaktioner mellem de monterede aktuatorer på deres krop, " sagde Ahmad.
Bevægelserne af robotten udviklet af Ahmad og hans kolleger er produceret af en enkelt motor, og dens ben er forbundet med hinanden gennem en ANS. I modsætning til andre tobenede robotter baseret på komplekse systemer, Fodgængere har en ret simpel struktur. Robotten tilpasser sig ændringer i dets omgivende miljø ved at udnytte fysiske egenskaber ved dens ben og interaktioner mellem dens forskellige komponenter, resulterer i en række forskellige gangadfærder.
"Robotens gangadfærd ændrer sig ved at ændre interaktionen mellem ANS'ens aktuatorer, " sagde Ahmad. "For at skabe bedre adfærd, robottens krav til et bestemt forbindelsesmønster er forskellige ud fra den givne situation. Vores arbejde tyder på, at den bedste måde at realisere selvtilpasselige robotter er ved at sætte dem i stand til at justere deres morfologier og udnytte deres helkropsdynamik som reaktion på miljøændringer."

Fodgængere, den tobenede robot udviklet af forskerne. Kredit:Ahmad et al.
Forskerne evaluerede deres robots ydeevne i en række eksperimenter. For det første, de testede, hvordan ændringer i robottens morfologi påvirkede dens gangadfærd ved at observere dens evne til at tilpasse sig forskellige jordmaterialer, med fokus på ændringer i dens gåstil, stabilitet, hastighed, og den retning, den bevægede sig i.
Efter at have analyseret resultaterne indsamlet i dette første eksperiment, Ahmad og hans kolleger opgraderede robottens design på en måde, så den automatisk kunne skifte på tværs af forskellige forbindelsesmønstre mellem dens ben. De foretog derefter en anden evaluering og fandt betydelige forbedringer i, hvordan robotten justerede sin morfologi under bevægelse. I dette andet eksperiment, Fodgængere producerede effektivt tilpasningsdygtige gangstile som reaktion på det miljø, de opererede i.
I fremtiden, robotten udviklet af dette team af forskere kunne bruges til at udføre opgaver, der involverer at bevæge sig rundt i ukontrollerede og konstant skiftende miljøer. Mens fodgængere kan ændre typen af interaktion mellem dens ben for at producere forskellige bevægelsesadfærd, der bedst matcher dens omgivelser, det kan stadig ikke selvstændigt identificere de morfologiske justeringer, der passer bedst til specifikke situationer. Forskerne planlægger at fortsætte arbejdet med robotten for at muliggøre denne vigtige evne, hvilket er nødvendigt for at robotten kan fungere uden kontinuerlig menneskelig input og vejledning.
"Det næste skridt i vores forskning vil være at realisere et kontrolsystem, der kan tillade robotten at blive ved med at yde den bedste ydeevne under alle bevægelsesfaser, selvstændigt at vælge et passende forbindelsesmønster, " sagde Ahmad. "Desuden, ved at udvide ANS til at omfatte flere dele af robotten (f.eks. overkroppen), dette vil øge de mulige morfologiske ændringer, hvilket igen afspejler robottens tilpasningsevne."
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Facebook lancerer offensiv for at bekæmpe misinformation om vaccinerVirksomheden vil også afvise den annonce, den finder, og som indeholder misinformation om vacciner Facebook lancerede en offensiv torsdag for at undertrykke spredningen af misinformation om vacc
Facebook lancerer offensiv for at bekæmpe misinformation om vaccinerVirksomheden vil også afvise den annonce, den finder, og som indeholder misinformation om vacciner Facebook lancerede en offensiv torsdag for at undertrykke spredningen af misinformation om vacc -
 Google sagsøgt af australske tilsynsmyndigheder for lokationssporingAustralian Competition and Consumer Commission (ACCC) formand Rod Sims taler under en mediekonference i Sydney, Tirsdag, 29. okt. 2019. ACCC tager Google for retten med påstand om, at teknologigigante
Google sagsøgt af australske tilsynsmyndigheder for lokationssporingAustralian Competition and Consumer Commission (ACCC) formand Rod Sims taler under en mediekonference i Sydney, Tirsdag, 29. okt. 2019. ACCC tager Google for retten med påstand om, at teknologigigante -
 University of California sygeplejersker, lægearbejdere melder sig i strejkeDemonstranter jubler, mens de lytter til en højttaler under et møde på UCLA-campus mandag, 7. maj, 2018, i Los Angeles. Tusindvis af forældremyndigheder, sikkerhedsvagter, gartnere og andre servicearb
University of California sygeplejersker, lægearbejdere melder sig i strejkeDemonstranter jubler, mens de lytter til en højttaler under et møde på UCLA-campus mandag, 7. maj, 2018, i Los Angeles. Tusindvis af forældremyndigheder, sikkerhedsvagter, gartnere og andre servicearb -
 Mikrochips kan permanent forbinde patienter med kliniske prøverDu så blodet strømme fra din arm ind i et hætteglas. Teknikeren lukkede hætteglasset og sikrede med et gummibånd papirskrotet med dit navn og patientoplysninger. Når du ringer for at få resultaterne a
Mikrochips kan permanent forbinde patienter med kliniske prøverDu så blodet strømme fra din arm ind i et hætteglas. Teknikeren lukkede hætteglasset og sikrede med et gummibånd papirskrotet med dit navn og patientoplysninger. Når du ringer for at få resultaterne a
- Forskning fremhæver måder at beskytte astronautens kardiovaskulære sundhed mod rumstråling
- Canadiske Radarsat-satellitter blev opsendt ombord på SpaceX-raketten
- Hvordan enzymaktivitet ændres som enzymkoncentrationreduktion
- Kinas online-servicegigant Meituan sigter mod at rejse 4,4 mia
- Kriminelle cybersquatters
- Kunne Jorden nogensinde få et nyt hav?