


En robotplanlægger, der reagerer på naturlige sprogkommandoer
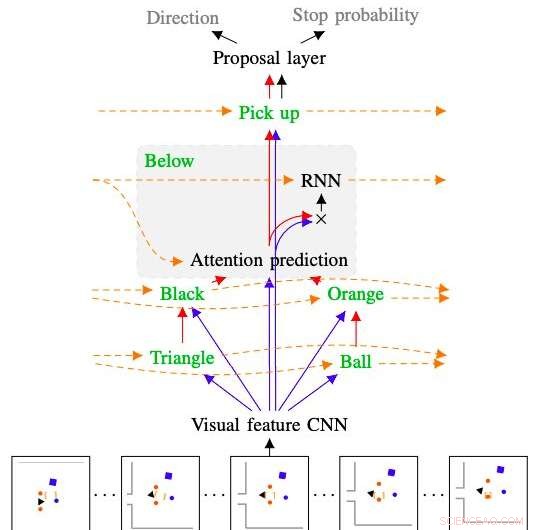
Figur, der viser, hvordan modellen udviklet af forskerne fortolker og følger kommandoen 'afhent den orange kugle nedenunder den sorte trekant'. Kredit:Kuo, Katz &Barbu.
I de kommende år, robotter kunne hjælpe menneskelige brugere på en række forskellige måder, både når de er inde i deres hjem og i andre rammer. For at være mere intuitiv, robotter skal være i stand til at følge naturlige sprogkommandoer og instruktioner, da dette giver brugerne mulighed for at kommunikere med dem, ligesom de ville med andre mennesker.
Med det i tankerne, forskere ved MIT's Center for Brains, Minds &Machines har for nylig udviklet en prøvetagningsbaseret robotplanlægger, der kan trænes til at forstå sekvenser af naturlige sprogkommandoer. Systemet de udviklede, præsenteret i et papir, der er forududgivet på arXiv, kombinerer et dybt neuralt netværk med en sampling-baseret planner.
"Det er ret vigtigt at sikre, at fremtidige robotter i vores hjem forstår os, både af sikkerhedsmæssige årsager og fordi sproget er den mest bekvemme grænseflade til at bede om, hvad du vil have, " Andrei Barbu, en af forskerne, der har udført undersøgelsen, fortalte TechXplore. "Vores arbejde kombinerer tre forskningsområder:robotplanlægning, dybe netværk, og vores eget arbejde med, hvordan maskiner kan forstå sprog. Det overordnede mål er at give en robot kun et par eksempler på, hvad en sætning betyder, og få den til at følge nye kommandoer og nye sætninger, som den aldrig har hørt før. "
Det vidtrækkende mål for forskningen udført af Barbu og hans kolleger er at bedre forstå kropssprogskommunikation. Faktisk, mens funktionerne og mekanismerne bag talt kommunikation nu er godt forstået, det meste af kommunikation, der finder sted mellem dyr og mennesker, er non-verbal.
At opnå en bedre forståelse af kropssprog kan føre til udvikling af mere effektive strategier for robot-menneske-kommunikation. Blandt andet, forskerne ved MIT har således undersøgt muligheden for at oversætte sætninger til robotbevægelser, og omvendt. Deres nylige undersøgelse er et første skridt i denne retning.

Kredit:Kuo, Katz og Barbu.
"Robotplanlæggere er fantastiske til at undersøge, hvad robotten kan, og derefter få robotten til at udføre en handling, "Yen-Ling Kuo, en anden forsker, der udførte undersøgelsen, fortalte TechXplore. "Vores arbejde tager en sætning, bryder det ned i stykker, disse stykker er oversat til små netværk, som er kombineret igen."
Ligesom sprog er opbygget af ord, der kan kombineres til sætninger efter grammatiske regler, netværk udviklet af Barbu, Kuo og deres kollega Boris Katz består af mindre netværk, der er trænet til at forstå enkelte begreber. Når de kombineres, disse netværk kan afdække og repræsentere betydningen af hele sætninger.
Den nye robotplanlægger udviklet af forskerne har to nøglekomponenter. Den første er et tilbagevendende hierarkisk dybt neuralt netværk, som styrer, hvordan planlæggeren udforsker det omgivende miljø, samtidig med at man forudsiger, hvornår en planlagt vej sandsynligvis vil nå et givet mål, og estimerer effektiviteten af hver af robottens mulige bevægelser individuelt. Den anden er en prøveudtagningsbaseret planlægger, der ofte bruges i robotstudier, kaldet rapidly explorer random tree (RRT).
"Den største fordel ved vores planlægger er, at det kræver lidt træningsdata, "Forklarede Barbu." Hvis du vil lære en robot, du kommer ikke til at give det tusindvis af eksempler derhjemme, men en håndfuld er ret rimelige. Træning af en robot bør indebære lignende handlinger som dem, du kunne udføre, hvis du trænede en hund."
Mens tidligere undersøgelser også undersøgte måder at guide robotter via verbale kommandoer, de teknikker, der præsenteres i dem, gælder ofte kun for diskrete miljøer, hvor robotter kun kan udføre en begrænset mængde handlinger. Planlæggeren udviklet af forskerne, på den anden side, kan understøtte en række interaktioner med det omgivende miljø, selvom de involverer objekter, som robotten aldrig har stødt på før.
"Når vores netværk er forvirret, planlæggerdelen tager over, finder ud af, hvad de skal gøre, og derefter kan netværket overtage næste gang, det er overbevist om, hvad de skal gøre, " Kuo forklarede. "Det faktum, at vores model er bygget op af dele, giver den også en anden ønskelig egenskab:fortolkning."
Når de ikke er i stand til at udføre en given opgave, mange eksisterende maskinlæringsmodeller er ikke i stand til at give information om, hvad der gik galt, og de problemer, de stødte på. Dette gør det sværere for udviklere at identificere en models mangler og foretage målrettede ændringer i dens arkitektur. Den dybe læringskomponent i robotplanlæggeren skabt af Barbu, Kuo og Katz, på den anden side, viser sin begrundelse trin for trin, tydeliggøre, hvad hvert ord, det behandler, formidler om verden, og hvordan det kombinerede resultaterne af dets analyser sammen. Dette giver forskerne mulighed for at lokalisere problemer, der forhindrede den i at gennemføre en given handling i fortiden og foretage ændringer i arkitekturen, der kunne sikre dens succes i fremtidige forsøg.
"Vi er meget begejstrede for ideen om, at robotter hurtigt kan lære sprog og hurtigt lære nye ord med meget lidt hjælp fra mennesker, " sagde Barbu. "Normalt, dyb læring anses for at være meget data-hungrende; dette arbejde forstærker ideen om, at når du bygger de rigtige principper (sammensætning) ind og får agenter til at udføre meningsfulde handlinger, har de ikke brug for nær så meget data."
Forskerne evaluerede deres planlæggers ydeevne i en række eksperimenter, samtidig med at dens ydeevne sammenlignes med eksisterende RRT-modeller. I disse tests, planlæggeren opnåede med succes betydningen af ord og brugte det, den lærte, til at repræsentere sekvenser af sætninger, som den aldrig har stødt på før, overgik alle de modeller, den blev sammenlignet med.
I fremtiden, modellen udviklet af dette team af forskere kunne informere udviklingen af robotter, der kan behandle og følge naturlige sprogkommandoer mere effektivt. I øjeblikket, deres planlægger giver robotter mulighed for at behandle og udføre enkle instruktioner såsom 'afhent tallerkenen på bordet', men er stadig ikke i stand til at fange betydningen af mere komplekse, såsom 'saml dukken op, når den falder på gulvet, og rengør den'. Barbu, Kuo og Katz forsøger således i øjeblikket at udvide rækken af sætninger, som robotten kan forstå.
"Vores langsigtede fremtidige mål er at udforske ideen om omvendt planlægning, " sagde Kuo. "Det betyder, at hvis vi kan gøre sprog til robothandlinger, så kunne vi også se handlinger og spørge robotten 'hvad tænkte nogen, da de gjorde dette?' Vi håber, at dette vil fungere som en nøgle til at låse op for kropssprog i robotter. "
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Forskere opdager sårbarheder, der påvirker milliarder af computerchipsWPI-sikkerhedsforskere Berk Sunar (til venstre) og Daniel Moghimi opdagede sikkerhedssårbarheder i computerchips lavet af Intel Corp. og STMicroelectronics. Kredit:Worcester Polytechnic Institute
Forskere opdager sårbarheder, der påvirker milliarder af computerchipsWPI-sikkerhedsforskere Berk Sunar (til venstre) og Daniel Moghimi opdagede sikkerhedssårbarheder i computerchips lavet af Intel Corp. og STMicroelectronics. Kredit:Worcester Polytechnic Institute -
 Madrid beordrer fjernelse af el-scootereAnkomsten af elektriske scootere har tvunget Madrid og andre spanske byer til at regulere den nye trend Madrids rådhus sagde tirsdag, at det havde nægtet at give en licens til tre elektriske sco
Madrid beordrer fjernelse af el-scootereAnkomsten af elektriske scootere har tvunget Madrid og andre spanske byer til at regulere den nye trend Madrids rådhus sagde tirsdag, at det havde nægtet at give en licens til tre elektriske sco -
 Solenergi kan gøre Bælt- og Vejinitiativet grøntDette visuelle abstrakt opsummerer hvordan med et enormt og ubalanceret regionalt solpotentiale, samarbejde og sammenkobling ved hjælp af BRI giver mulighed for at afkoble fremtidig økonomisk vækst fr
Solenergi kan gøre Bælt- og Vejinitiativet grøntDette visuelle abstrakt opsummerer hvordan med et enormt og ubalanceret regionalt solpotentiale, samarbejde og sammenkobling ved hjælp af BRI giver mulighed for at afkoble fremtidig økonomisk vækst fr -
 Rent-a-captain:S. Afrika afhjælper global pilotmangelSouth African Airways ønsker at udleje overskydende piloter og kabinepersonale til andre flyselskaber for at reducere omkostningerne Næste gang du stuver dit bakkebord, spænd sikkerhedsselen og gø
Rent-a-captain:S. Afrika afhjælper global pilotmangelSouth African Airways ønsker at udleje overskydende piloter og kabinepersonale til andre flyselskaber for at reducere omkostningerne Næste gang du stuver dit bakkebord, spænd sikkerhedsselen og gø
- Nyt design til nanopartikler, der absorberer lavenergilys, udsender højenergilys kan finde anvendel…
- Spækhuggere:Hvorfor mere end halvdelen af verdener spækhuggere er truet af resterende industrike…
- Spektral opløsning af superledende enkeltfotondetektorer mere end fordoblet
- Sådan bygger du et pariserhjul som et skoleprojekt
- Forskere laver ultrakompakt on-chip beregningsmæssigt infrarødt spektrometer
- Sunshine bringer højere auktionspriser