


En bæredygtig strategi til fremstilling af sensorer til bløde robotter
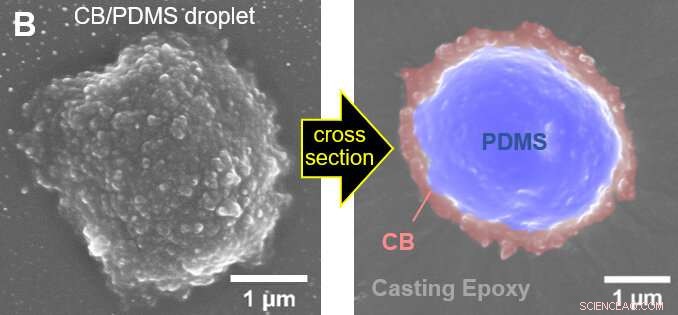
En dråbe af emulsionen hærdede i ethanolmedium før (venstre) og efter at ethanolen er fordampet (højre). Tværsnitsbilledet er falskfarvet for at fremhæve polymerkernen (blå) og kulsorte nanopartikelskal (rød). Kredit:Kim et al., Sci. Robot. 5, eaay3604 (2020)
Et stigende antal virksomheder og forskningsgrupper verden over udvikler nu kompatible sensorer baseret på kompositmaterialer, som kan have en bred vifte af mulige anvendelser. kompositmaterialer, dem, der er lavet af to eller flere stoffer, har ofte unikke og fordelagtige egenskaber, der adskiller sig fra deres individuelle komponenters.
Tidligere undersøgelser har fundet ud af, at kompositmaterialer indeholdende polymermatricer og ledende fyldstoffer er særligt lovende for udviklingen af kompatible sensorer, da de kan printes i store skalaer. En vigtig fordel ved sensorer lavet af denne klasse af materialer er, at de kan integreres i geometrisk komplekse eller fleksible systemer, såsom bærbare enheder og bløde robotter.
Forskere ved Yale University har for nylig introduceret en tilgang, der kunne muliggøre bæredygtig fremstilling af kompatible sensorer til bløde robotapplikationer. Denne tilgang, præsenteret i en Videnskab robotik papir, involverer brugen af en ethanolbaseret Pickering-emulsion, der spontant koagulerer, skabe en ledende komposit, der nemt kan printes på bløde robotsystemer.
"Udskrivning af kompositmaterialer indebærer generelt brug af opløsningsmidler, såsom toluen eller cyclohexan, at opløse polymerharpiksen og fortynde materialet til en printbar viskositet, " skrev forskerne i deres papir. "Men, sådanne opløsningsmidler forårsager kvældning og nedbrydning af de fleste polymersubstrater, begrænser anvendeligheden af kompositmaterialerne. I øvrigt, mange konventionelle opløsningsmidler er giftige eller på anden måde udgør en sundhedsfare."
Er klar over de udfordringer, man støder på, når man forsøger at printe kompositmaterialer ved hjælp af opløsningsmidler, forskerne ved Yale udtænkte en ny tilgang, der kunne muliggøre fremstilling af sensorer på en mere effektiv og bæredygtig måde. Strategien, de udviklede, er baseret på brugen af en ethanol-baseret Pickering-emulsion, der koagulerer spontant, skabe en ledende komposit, der kan printes ind i forskellige typer sensorer.
"Pickering-emulsionen består af emulgerede polymerprækursorer stabiliseret af ledende nanopartikler i en ethanolbærer, " skrev forskerne i deres papir. "Ved fordampning af ethanolen, prækursorerne frigives, som derefter smelter sammen mellem nanopartikelnetværk og spontant polymeriserer i kontakt med den atmosfæriske fugt."
Så snart de afgrænsede deres nye sensorfremstillingsstrategi, forskerne trykte den selvkoagulerende Pickering-emulsion i en række polymere systemer, herunder traditionelle tekstilmaterialer og bløde aktuatorer. Det ledende stof, de brugte, gav disse systemer registreringsevner, resulterer i forskellige typer kompatible sensorer.
-
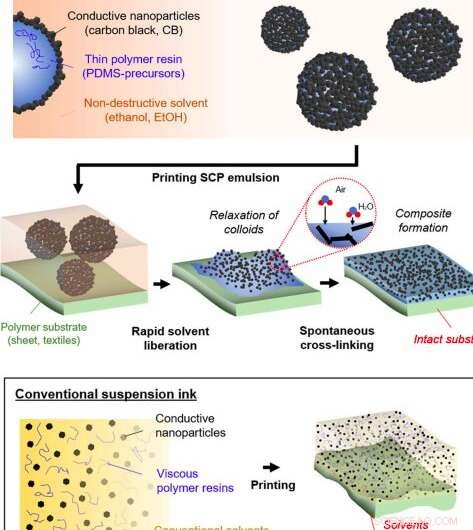
Illustration, der viser, hvordan SCP-emulsionen og printprocessen fungerer. Kredit:Kim et al.
-
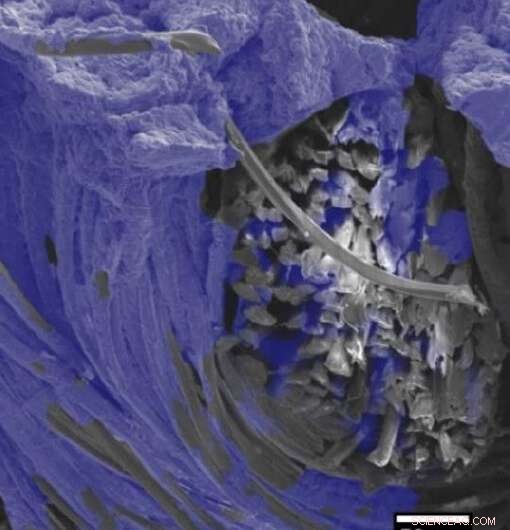
Et nærbillede af de emulsionsinfunderede tekstiler (grå). Emulsionen er angivet med blåt. Kredit:Kim et al., Sci. Robot. 5, eaay3604 (2020)
-
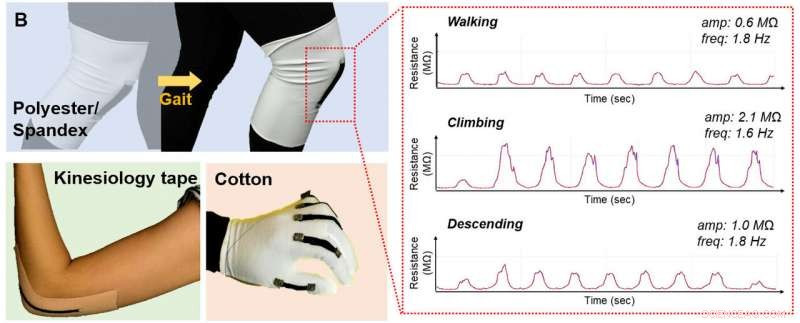
Blot at "male" emulsionen på beklædningsgenstande og kinesiologitape kan resultere i færdiglavede strain-sensing wearables. Kredit:Kim et al., Sci. Robot. 5, eaay3604 (2020)
Indtil nu, forskerne har brugt deres fremstillingstilgang til at skabe komposit-infunderet kinesiologitape, knæbeskyttere og bomuldshandsker. De anvendte også den samme strategi til at fremstille bløde robotskind, døbt OmniSkins, ved at printe den ledende emulsion på muslinstof og fastgøre aktuatorer på den.
I foreløbige tests, Pickering emulsionsbaserede sensorsystemer udviklet af forskerne opnåede en bemærkelsesværdig belastningsfølsomhed og ubetydelig hysterese, som er yderst ønskelige egenskaber for de fleste bærbare teknologier og bløde robotapplikationer. I fremtiden, den nye produktionsstrategi introduceret i dette nylige papir kunne muliggøre en mere bæredygtig udvikling af innovative og højtydende sensorteknologier, inklusive bløde robotskind og beklædningsgenstande med sansefunktioner.
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 At bringe menneskelignende ræsonnement til førerløs bilnavigationFor at bringe mere menneskelignende ræsonnement til autonom køretøjsnavigation, MIT-forskere har skabt et system, der gør det muligt for førerløse biler at tjekke et simpelt kort og bruge visuelle dat
At bringe menneskelignende ræsonnement til førerløs bilnavigationFor at bringe mere menneskelignende ræsonnement til autonom køretøjsnavigation, MIT-forskere har skabt et system, der gør det muligt for førerløse biler at tjekke et simpelt kort og bruge visuelle dat -
 Går op til en ny hastighedsrekord i KalahariBloodhound gør sig klar til at forsøge at slå den nuværende landhastighedsrekord Et højt sus suser gennem stilheden i det sydlige Afrikas Kalahari -ørken. Det lyder som et kampfly, der flyver lav
Går op til en ny hastighedsrekord i KalahariBloodhound gør sig klar til at forsøge at slå den nuværende landhastighedsrekord Et højt sus suser gennem stilheden i det sydlige Afrikas Kalahari -ørken. Det lyder som et kampfly, der flyver lav -
 Du ved ikke, om en online restaurantanmeldelse er falsk - men dette kan AIEr denne restaurantanmeldelse skrevet af en maskine eller en person? Ikke så let, er det? Kredit:Aalto Universitet Forskere finder, at AI-genererede anmeldelser og kommentarer udgør en betydelig t
Du ved ikke, om en online restaurantanmeldelse er falsk - men dette kan AIEr denne restaurantanmeldelse skrevet af en maskine eller en person? Ikke så let, er det? Kredit:Aalto Universitet Forskere finder, at AI-genererede anmeldelser og kommentarer udgør en betydelig t -
 Kunstig intelligens hjælper soldater med at lære mange gange hurtigere i kampHærens forskere og deres akademiske partnere finder kunstig intelligens-teknikker, der gør det muligt for amerikanske soldater at lære 13 gange hurtigere. Kredit:US Army illustration Ny teknologi
Kunstig intelligens hjælper soldater med at lære mange gange hurtigere i kampHærens forskere og deres akademiske partnere finder kunstig intelligens-teknikker, der gør det muligt for amerikanske soldater at lære 13 gange hurtigere. Kredit:US Army illustration Ny teknologi