


Tillid til mennesker og robotter:Økonomisk ens, men følelsesmæssigt anderledes
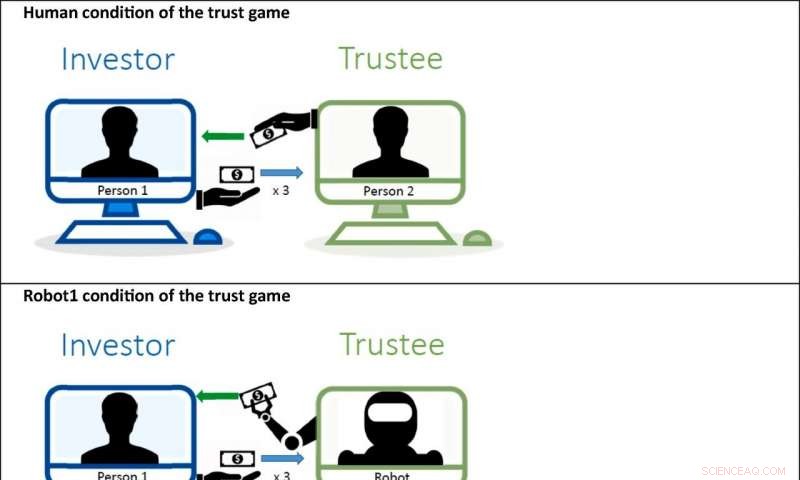
I den menneskelige tilstand parres en menneskelig deltager (Person 1) i rollen som investor med en menneskelig deltager (Person 2) i rollen som administrator. I Robot1-tilstanden parres et menneske (Person 1) i rollen som investor med en robot i rollen som trustee. I Robot2-tilstanden parres en menneskelig deltager (Person 1) i rollen som investor med en robot i rollen som administrator, der handler på vegne af en passiv deltager (Person 2). Kredit:Chapman University
I forskning offentliggjort i Tidsskrift for økonomisk psykologi , videnskabsmænd undersøger, om folk stoler på robotter, som de gør medmennesker. Disse interaktioner er vigtige at forstå, fordi tillidsbaserede interaktioner med robotter er mere og mere almindelige på markedet, arbejdsplads, på vejen og i hjemmet. Resultater viser, at folk udvider tillid på samme måde som mennesker og robotter, men folks følelsesmæssige reaktioner i tillidsbaserede interaktioner varierer afhængigt af partnertype.
Undersøgelsen blev ledet af Chapman University's Eric Schniter, Ph.D. og Timothy Shields, Ph.D. sammen med University of Montreals Daniel Sznycer, Ph.D.
Forskerne brugte et anonymt tillidsspilseksperiment, hvor en menneskelig tillidsmand besluttede, hvor meget af en bevilling på $10, der skulle give til en tillidsmand - et menneske, en robot, eller en robot, hvis udbytte går til et andet menneske. Den menneskelige tillidsmand ved, at der var potentielle gevinster ved overførslen, og administratoren ville afgøre, om han skulle gengælde ved at overføre et beløb tilbage. Robotter blev programmeret til at efterligne tidligere observeret reciprokering af menneskelige tillidsmænd.
Det er veletableret, at i tillidsspil som dette, de fleste mennesker træffer beslutninger, der fører til både tillidsmands- og trusteefordele. Efter interaktionen, deltagere vurderede forskellige positive og negative følelser.
Det eksperimentelle design gjorde det muligt for forskere at forklare to vigtige aspekter af tillid til robotter, der kan forklares:hvor meget mennesker stoler på robotter sammenlignet med medmennesker og mønstre for, hvordan mennesker reagerer følelsesmæssigt efter interaktioner med robotter kontra andre mennesker.
Eksperimentet viser, at folk udvider tilsvarende niveauer af tillid til mennesker og robotter. Det er ikke, hvad vi ville finde, hvis mennesker blindt stolede på eller nægtede at stole på robotter. Dette ville heller ikke være resultatet, hvis vi tror, at folk udvider tillid med den ene intention om at forbedre andre menneskers velfærd, da tillid til en robot ikke forbedrer en anden persons velfærd.
Resultatet er i overensstemmelse med det synspunkt, at folk udvider tillid for både økonomisk gevinst og for at opdage information om menneskelige adfærdstilbøjeligheder. Gennem deres tillidsinteraktioner med robotterne, deltagerne lærte om medmenneskers samarbejdsvilje.
Sociale følelser er mere end følelser - de regulerer social adfærd. Mere specifikt, sociale følelser som skyld, taknemmelighed, vrede, og stolthed påvirker, hvordan vi behandler andre og påvirker, hvordan andre behandler os i tillidsbaserede interaktioner.
Deltagerne i dette eksperiment oplevede sociale følelser forskelligt afhængigt af, om deres partner var en robot eller et menneske. En undladelse af at gengælde tillidsmandens investering i administratoren udløste mere vrede, når administratoren var et menneske, end når administratoren var en robot. Tilsvarende gensidighed udløste mere taknemmelighed, når administratoren var et menneske, end når administratoren var en robot.
Yderligere, deltagernes følelser skelnes fint mellem robottyper. De rapporterede, at de følte mere intens stolthed og skyld, når robottillidsmandens udbetaling gik til et menneske, end når robotten handlede alene.
I betragtning af at den oprindelige tillid ikke var forskellig på tværs af partnertyper, men sociale følelser gjorde det, en udtalt mulighed er, at genudvidelse af tillid i gentagne interaktioner vil være forskellig, når partneren er et menneske, en robot, eller en robot knyttet til en menneskelig modtager.
I fremtiden, kørsel vil præsentere interaktionsmuligheder, hvor det vil have betydning, om beslutninger træffes af mennesker eller robotter, og om de tjener mennesker eller ej. Nogle biler, der bruges til levering eller afhentning, kan køre uden menneskelige passagerer, andre biler vil køre med passive menneskelige passagerer og atter andre biler vil blive ført af menneskelige chauffører. Analoge interaktioner forekommer med automatiserede eller robotiserede check-in-agenter, bankbetjente, kirurger, etc.
Partnerskaber med konsekvente modspillere kan konsolideres til stærkere, mere produktive partnerskaber, når reciprokatorerne er medmennesker, fordi mennesker fremkalder mere taknemmelighed end robotter gør. Omvendt partnerskaber med inkonsekvente reciprocatorer kan være mere stabile, når reciprocatorerne er robotter, fordi robotter fremkalder mindre vrede end mennesker gør. Yderligere, mennesker oplevede stolthed og skyldfølelse mere intenst i interaktioner, hvor robotter tjente en modtager, hvilket tyder på, at folk vil være mere tilbøjelige til at genudvide tillid til lignende partnere.
Den menneskelige kognitive arkitektur udviklede sig til at have tilstrækkelig struktur og indhold til at fremme vores forfædres overlevelse og reproduktion, samtidig med at den havde fleksibiliteten til at navigere i nye udfordringer og muligheder. Disse funktioner gør det muligt for mennesker at designe og rationelt interagere med kunstig intelligens og robotter. Stadig, interaktioner med automater, og videnskabens evne til at forklare disse interaktioner er ufuldkommen, fordi automater mangler de psykofysiske signaler, som vi forventer i en interaktion og ofte er styret af uforklarlige eller uintuitive beslutningslogikker.
 Varme artikler
Varme artikler
-
 Deling af elektrisk scooter bevæger sig ind i hurtigbanenElektriske scootere lejet af smartphone -app er ved at blive en trend i Washington DC og andre byer Hvor hurtigt vokser den elektriske scooter-delingskrage? Hurtigt nok til at blive erklæret for
Deling af elektrisk scooter bevæger sig ind i hurtigbanenElektriske scootere lejet af smartphone -app er ved at blive en trend i Washington DC og andre byer Hvor hurtigt vokser den elektriske scooter-delingskrage? Hurtigt nok til at blive erklæret for -
 Israels centralbank giver grønt lys til ny digital bankKredit:CC0 Public Domain Israels centralbank siger, at den har givet et par højprofilerede iværksættere en licens til at åbne landets første helt digitale bank. Den første nye bank, der blev etab
Israels centralbank giver grønt lys til ny digital bankKredit:CC0 Public Domain Israels centralbank siger, at den har givet et par højprofilerede iværksættere en licens til at åbne landets første helt digitale bank. Den første nye bank, der blev etab -
 Forskere øger bevidstheden om sammenkobling, privatlivsrisici ved onlinetjenesterKredit:CC0 Public Domain Hvis du er en hyppig bruger af teknologi, noget som dette sker sandsynligvis for dig hver dag:Du søger på nettet efter artikler om din nye hvalps ernæringsbehov, og næsten
Forskere øger bevidstheden om sammenkobling, privatlivsrisici ved onlinetjenesterKredit:CC0 Public Domain Hvis du er en hyppig bruger af teknologi, noget som dette sker sandsynligvis for dig hver dag:Du søger på nettet efter artikler om din nye hvalps ernæringsbehov, og næsten -
 Til ros for den store pixel:Gaming har et retro-øjeblikAfskriv ikke retro endnu Clunky spilkonsoller med blobby-pixel er måske ikke det nyeste – men de er stadig seje, selvom du ikke længere er i skole. Videospilsproducenter, der leverer deres varer
Til ros for den store pixel:Gaming har et retro-øjeblikAfskriv ikke retro endnu Clunky spilkonsoller med blobby-pixel er måske ikke det nyeste – men de er stadig seje, selvom du ikke længere er i skole. Videospilsproducenter, der leverer deres varer
- Nanopartikelinjektioner kan være fremtidige ved behandling af slidgigt
- Californiens CO2-reduktionsbestræbelser kan blive forpurret af selve klimaændringerne
- Dårligt vejr forsinker lanceringen af amerikansk rumfragt til fredag
- Hollænderne køber Air-France KLM-andele for at modvirke fransk indflydelse
- Undersøgelse:Lejere af farve er mindre tilbøjelige til at blive boligejere
- Nyt nanomateriale udviklet til at spalte vandmolekyler, få dihydrogen under sollys