


LiDAR- og radarsensorer – pladsbesparende forlygteinstallation
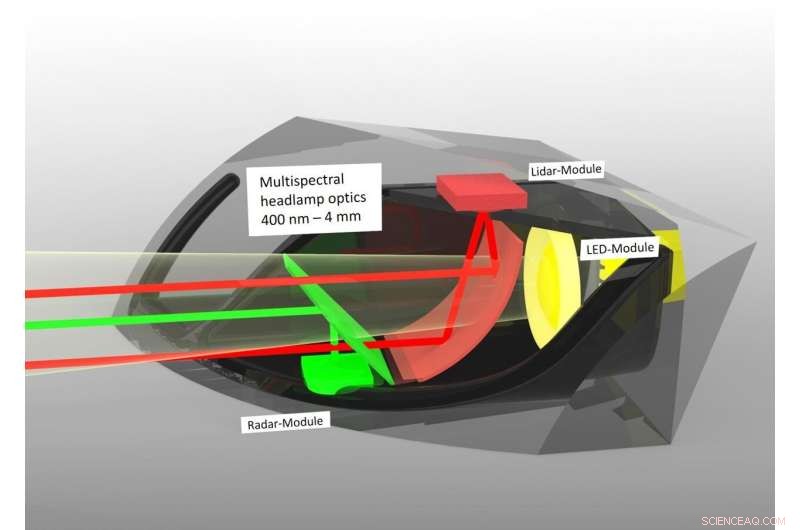
LED-forlygtemodel med multispektrale kombinatorer til koaksial sammensmeltning af optisk lys, LiDAR (rød) og radarstråler (grøn), med det formål at opnå pladsbesparende sensorintegration til næste generations førerassistentsystemer. Kredit:Fraunhofer FHR
Folk bruger deres øjne og ører til at opfange trafiksituationer, der involverer potentielle farer. For at selvkørende køretøjer kan gøre det samme, har de brug for en lang række sensorer. Efterhånden som antallet af sensorer, de indeholder, stiger, stiger den mængde plads, der kræves for at passe dem ind - noget, der ofte er uforeneligt med designeres vision.
Nu har forskere ved Fraunhofer-Gesellschaft opdaget en metode til at integrere visse sensorer diskret. Deres løsning ligger i køretøjets forlygter, hvor de kombinerer optisk lys, radar og LiDAR.
Nutidens køretøjer er i stand til selv at påtage sig flere og flere funktioner uden at kræve førerens input. Fartpilot holder automatisk den rigtige afstand til den forankørende bil, vognbaneskifteadvarselssystemer korrigerer om nødvendigt køretøjets vej, og nødbremsningen træder i kraft, hvis føreren bliver overrumplet.
Alt dette er muligt takket være kameraer i passagerområdet og radarsensorer i kølergrillen – og fremtiden er sat til at se biler gøre endnu mere af sig selv. At få dette til at ske betyder, at du skal bruge betydeligt flere sensorer, men at proppe grillen fulde af dem er ikke noget, bildesignere er ivrige efter at underholde.
Radar- og LiDAR-sensorer integreret i forlygter
Fem Fraunhofer-institutter, herunder Institute for High Frequency Physics and Radar Techniques FHR, er gået sammen som en del af Smart Headlight-projektet for at skabe en metode til installation af sensorer, der både er pladsbesparende og så subtil som muligt – uden at gå på kompromis med funktion eller ydeevne.
Projektets mål er at udvikle en sensor-integreret forlygte til førerassistentsystemer, der gør det muligt at kombinere en række sensorelementer med adaptive lyssystemer. Det er håbet, at dette vil forbedre sensorernes evne til at identificere genstande på vejen – og især andre trafikanter, såsom fodgængere. LiDAR-sensorer kan for eksempel bruges i elektroniske bremseassistent- eller afstandskontrolsystemer.
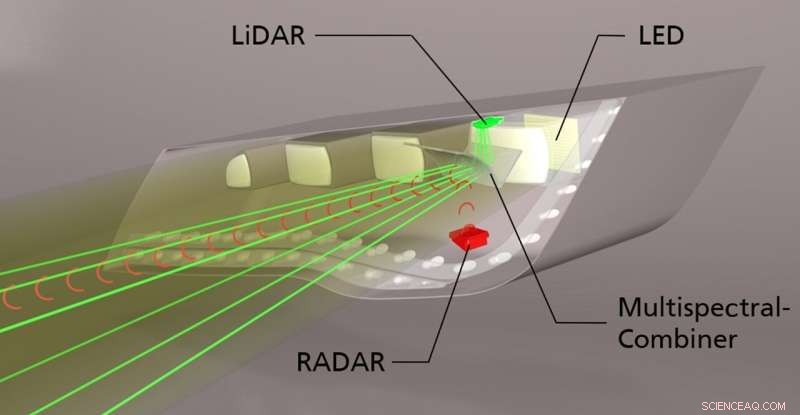
3D-visualisering af multispektral forlygteoptik. Kredit:Fraunhofer FHR
"Vi integrerer radar- og LiDAR-sensorer i forlygter, der allerede er der alligevel - og hvad mere er, det er de dele, der sikrer den bedst mulige transmission for optiske sensorer og lyskilder og er i stand til at holde tingene rene," siger Tim Freialdenhoven, en forsker ved Fraunhofer FHR. LiDAR-sensorer (Light Detection And Ranging) fungerer ved hjælp af et måleprincip, der er baseret på at bestemme tiden mellem en laserimpuls, der udsendes, og det reflekterede lys modtages, en metode, der producerer exceptionelt præcise afstandsmålinger.
Den første fase i at skabe forlygtesensorer involverer design af et LiDAR-system, der er egnet til integration i bilteknologi. Dette skal også tages i betragtning, at lyset, der stråler ud på vejen af forlygten, ikke kan hæmmes af de to ekstra sensorer, selvom de lysdioder, der er ansvarlige for lyset, er placeret langt tilbage i forlygten.
Af denne grund placerer forskerne LiDAR-sensorerne øverst og radarsensorerne i bunden af forlygtehuset. Samtidig skal strålerne fra begge sensorsystemer følge samme vej som LED-lyset – noget der bliver vanskeligere af, at alle de involverede stråler har forskellige bølgelængder.
Det synlige lys fra forlygten måler i området 400 til 750 nanometer, mens infrarøde LiDAR-stråler spænder fra 860 til 1.550 nanometer, tæt på det synlige område. Radarstråler har på den anden side en bølgelængde på fire millimeter. "Disse tre bølgelængder skal fusioneres koaksialt - det vil sige langs den samme akse - og det er her, hvad vi kalder en multispektral kombinator," siger Freialdenhoven.
At styre bjælkerne koaksialt på denne måde er afgørende for at forhindre parallaksefejl, som er komplicerede at udrede. Derudover ville det at placere sensorerne ved siden af hinanden optage betydeligt mere plads end en koaksial konfiguration, så forskerne kommer uden om dette ved hjælp af såkaldte bi-combiners.
For at kombinere LED-lys og LiDAR-lys bruger denne løsning et dikroisk spejl med en speciel belægning, som leder de to strålebundter langs en enkelt akse ved hjælp af bølgelængdeselektiv refleksion. Den samme effekt sker i den anden combiner (omend på en mere kompleks måde på grund af de meget forskellige bølgelængder), hvor LED-lyset, LiDAR-lyset og radaren kombineres.
Da radarsensorer allerede er i udbredt brug i bilindustrien, skal bi-kombinerdesigner tillade producenterne at fortsætte med at bruge eksisterende sensorer uden behov for ændringer.
Radarsystemer:Trænger ind i tågen
Så hvorfor overhovedet kombinere optiske systemer, LiDAR og radar? "Hvert individuelt system har sine styrker, men også sine svagheder," forklarer Freialdenhoven.
Optiske systemer viser for eksempel begrænset ydeevne i situationer, hvor sigtbarheden er dårlig, såsom tågede og støvede omgivelser. Radarsystemer på den anden side er i stand til at tage tætte tågeskyer i deres skridt, men er ikke særlig gode til at kategorisere:Selvom de er i stand til at fortælle, om noget er en person eller et træ, har deres evner intet på LiDAR-systemer.
"Vi arbejder også på at fusionere data fra radar og LiDAR - noget, der vil tilføje enorm værdi, især når det kommer til pålidelighed," siger Freialdenhoven. Holdet har allerede indsendt en patentansøgning og arbejder nu hårdt på at skabe en prototype.
Teknologien skal skabe en lang række yderligere muligheder for at integrere sensorer i førerassistentsystemer. Mindre lysmoduler, mere kompakte LiDAR-sensorer og integrerede radarsensorer vil gøre det muligt at skabe multisensorkoncepter – især med henblik på selvkørende køretøjsteknologi, hvor designkravene bliver mere krævende og installationspladsen er begrænset.
Som et resultat heraf kan fremtidige selvkørende systemer muligvis ikke kun registrere en person, men også analysere deres hastighed, hvor langt væk de er og den vinkel, de er placeret i i forhold til køretøjet. + Udforsk yderligere
Kraftig regn påvirker genstandsdetektion af autonome køretøjers LiDAR-sensorer
 Varme artikler
Varme artikler
-
 Er Zuckerberg villig til at handle modigt for at rette op på Facebook-krisen?Denne 5. feb. Filfoto fra 2007 viser Facebooks grundlægger Mark Zuckerberg ved Facebooks hovedkvarter i Palo Alto, Californien Zuckerbergs drengeagtige udseende, selv i dag, er en påmindelse om, hvor
Er Zuckerberg villig til at handle modigt for at rette op på Facebook-krisen?Denne 5. feb. Filfoto fra 2007 viser Facebooks grundlægger Mark Zuckerberg ved Facebooks hovedkvarter i Palo Alto, Californien Zuckerbergs drengeagtige udseende, selv i dag, er en påmindelse om, hvor -
 Discovery fjerner pres fra blodmålingerBlodtryksovervågningsenhed i skala. Kredit:Monash University Forskere ved Monash University er på nippet til at skabe en revolutionær, bærbar blodtryksovervågningsenhed, der kontinuerligt kan leve
Discovery fjerner pres fra blodmålingerBlodtryksovervågningsenhed i skala. Kredit:Monash University Forskere ved Monash University er på nippet til at skabe en revolutionær, bærbar blodtryksovervågningsenhed, der kontinuerligt kan leve -
 APNewsBreak:USA har mistanke om mobiltelefonspionageudstyr i DCDette udaterede filbillede leveret af U.S. Patent and Trademark Office viser StingRay II, en mobilsitesimulator, der bruges til overvågningsformål, fremstillet af Harris Corporation, af Melbourne, Fla
APNewsBreak:USA har mistanke om mobiltelefonspionageudstyr i DCDette udaterede filbillede leveret af U.S. Patent and Trademark Office viser StingRay II, en mobilsitesimulator, der bruges til overvågningsformål, fremstillet af Harris Corporation, af Melbourne, Fla -
 Facebooks nyhedsbrug falder, WhatsApp vokser:undersøgelseFacebook er blevet hårdt ramt af en enorm skandale om brugerdatas privatliv Nyhedsforbruget skifter i stigende grad fra sociale medier som Facebook til messaging -applikationer som WhatsApp, ifølg
Facebooks nyhedsbrug falder, WhatsApp vokser:undersøgelseFacebook er blevet hårdt ramt af en enorm skandale om brugerdatas privatliv Nyhedsforbruget skifter i stigende grad fra sociale medier som Facebook til messaging -applikationer som WhatsApp, ifølg
- Fyrre år efter, Voyager springer stadig gennem rummet
- Brunel finjusterer næste generations digitale motor
- Forskere diskuterer den fremtidige virkning af nutidens nanoteknologiske forskning
- Forskere laver kulstof-nanorørmønstre kaldet moirés til materialeforskning
- Tardigrader overlever stød på op til 825 meter i sekundet
- Spændende resultater af 2 eksperimenter trodser fysikens regelbog