


Lære robotter at være holdspillere med naturen
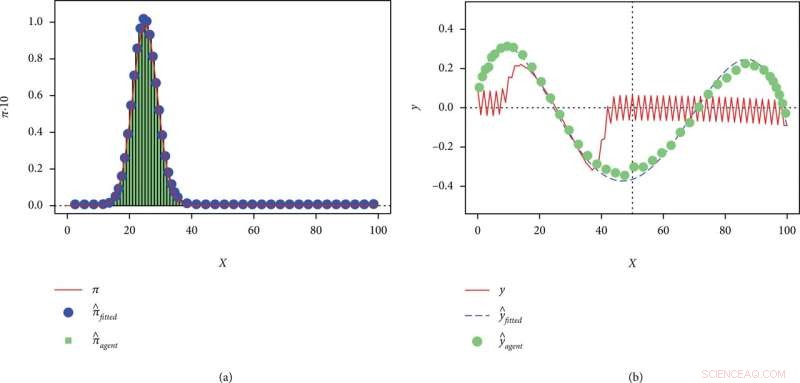
Resultater for det unimodale scenarie. Illustration af designmetoden og sammenligning med multiagentsimuleringer for det unimodale scenarie:(a) viser den stationære fordeling og (b) den forventede ændring. Kredit:Intelligent Computing (2022). DOI:10.34133/2022/9761694
Alger blomstrer, fugle flokkes, og insekter sværmer. Denne masseadfærd fra individuelle organismer kan give separat og kollektivt gode, såsom at forbedre chancerne for vellykket parringsformering eller give sikkerhed. Nu har forskere udnyttet de selvorganiseringsevner, der kræves for at høste fordelene af naturlige sværme til robotapplikationer inden for kunstig intelligens, databehandling, eftersøgning og redning og meget mere.
De offentliggjorde deres metode den 3. august i Intelligent Computing .
"At designe et sæt regler, der, når de først er udført af en sværm af robotter, resulterer i en specifik ønsket adfærd, er særligt udfordrende," sagde den tilsvarende forfatter Marco Dorigo, professor i laboratoriet for kunstig intelligens, ved navn IRIDIA, fra Université Libre de Bruxelles, Belgien. "Sværmens adfærd er ikke et en-til-en-kort med enkle regler, der udføres af individuelle robotter, men er snarere et resultat af de komplekse interaktioner mellem mange robotter, der udfører det samme sæt regler."
Robotterne skal med andre ord arbejde sammen for at nå det samlede mål om diskrete bidrag. Spørgsmålet er ifølge Dorigo og hans medforfattere Dr. Valentini og Prof. Hamann, at konventionelt design for individuelle enheder for at opnå et kollektivt mål er bottom-up, hvilket kræver trial-and-error-forbedring, som kan være dyrt.
"For at tackle denne udfordring foreslår vi en ny global-til-lokal designtilgang," sagde Dorigo. "Vores nøgleidé er at sammensætte en heterogen sværm ved hjælp af grupper af adfærdsmæssigt forskellige agenter, således at den resulterende sværmadfærd nærmer sig et brugerinput, der repræsenterer hele sværmens adfærd."
Denne sammensætning involverer udvælgelse af individuelle agenter med forudbestemt adfærd, som forskerne ved vil arbejde sammen for at opnå den målrettede kollektive adfærd. De mister evnen til lokalt at programmere individuelle enheder, men ifølge Valentini, Hamann og Dorigo er afvejningen det værd. De pegede på eksemplet med en overvågningsopgave, hvor en sværm muligvis skal overvåge et anlæg, der kræver mere intern overvågning om dagen og mere ekstern overvågning om natten.
"Brugeren giver en beskrivelse af de ønskede sværmtildelinger som en sandsynlighedsfordeling over rummet af alle mulige sværmtildelinger - flere agenter inde om dagen, flere udenfor om natten eller omvendt," sagde Valentini.
Brugeren vil definere måladfærden ved at ændre antallet og positionen af distributionstilstande, hvor hver tilstand svarer til en specifik allokering, såsom 80 % af agenter inde, 20 % udenfor om dagen og 30 % inde, 70 % udenfor om natten. Dette gør det muligt for sværmen at ændre adfærd periodisk og autonomt, forudbestemt af de indstillede tilstande, efterhånden som omstændighederne ændrer sig.
"Selvom det er svært at finde de nøjagtige kontrolregler for robotter, så sværmen opfører sig, som vi ønsker, kan en ønsket sværmadfærd opnås ved at kombinere forskellige sæt kontrolregler, som vi allerede forstår," sagde Dorigo. "Sværmadfærd kan designes makroskopisk ved at blande robotter af forskellige foruddefinerede regelsæt."
Det er ikke første gang, Dorigo har henvendt sig til naturen for at forbedre computervidenskabelige tilgange. Han har tidligere udviklet myrekolonioptimeringsalgoritmen, baseret på hvordan myrer navigerer mellem deres kolonier og fødekilder, for at løse vanskelige computerproblemer, der involverer at finde en god tilnærmelse af en optimal sti på en graf.
Mens Dorigo først foreslog denne tilgang til et relativt simpelt problem, har den siden udviklet sig som et middel til at løse en række problemer. Dorigo sagde, at han planlægger at tage sværmmetoden i en lignende retning.
"Vores umiddelbare næste skridt er at demonstrere gyldigheden af vores metodologi på tværs af et større sæt sværm-adfærd og gå videre end opgavefordeling," sagde Dorigo. "Vores ultimative mål er at forstå, hvad der gør dette muligt, ved at formalisere en generisk teori, der giver forskere og ingeniører mulighed for at designe sværmeadfærd uden at gå igennem den omhyggelige trial-and-error-proces." + Udforsk yderligere
Mindre kommunikation mellem robotter giver dem mulighed for at træffe bedre beslutninger
Sidste artikelSandblæsning med lys
Næste artikelTagsolceller kan også være en fordel for vandbesparelse
 Varme artikler
Varme artikler
-
 Tesla-aktien falder tættere på pre-Musk-tweetniveauEt Tesla -emblem ses på bagsiden af en Model S i Tesla -showroomet i Santa Monica, Californien, på onsdag, 8. august, 2018. Bestyrelsesmedlemmer hos Tesla evaluerer administrerende direktør og forma
Tesla-aktien falder tættere på pre-Musk-tweetniveauEt Tesla -emblem ses på bagsiden af en Model S i Tesla -showroomet i Santa Monica, Californien, på onsdag, 8. august, 2018. Bestyrelsesmedlemmer hos Tesla evaluerer administrerende direktør og forma -
 Mad vækker interesse på Vegas tech showJeremy Miller fra GE Appliances viser en smart hub, som bruger kunstig intelligens til at hjælpe forbrugere med planlægning og forberedelse af måltider, ved 2020 Consumer Electronics Show i Las Vegas
Mad vækker interesse på Vegas tech showJeremy Miller fra GE Appliances viser en smart hub, som bruger kunstig intelligens til at hjælpe forbrugere med planlægning og forberedelse af måltider, ved 2020 Consumer Electronics Show i Las Vegas -
 Ny enhed lover lavere driftsomkostninger for jernbanesektorenKredit:VMCgroup, Shutterstock Vedligeholdelsesarbejde på jernbaneinfrastruktur koster jernbanesektoren tæt på 40 000 EUR pr. kilometer jernbanespor. Faktisk, jernbaneselskaber bruger betydelige be
Ny enhed lover lavere driftsomkostninger for jernbanesektorenKredit:VMCgroup, Shutterstock Vedligeholdelsesarbejde på jernbaneinfrastruktur koster jernbanesektoren tæt på 40 000 EUR pr. kilometer jernbanespor. Faktisk, jernbaneselskaber bruger betydelige be -
 Online købmandstjenester kæmper for at imødekomme stigningen i efterspørgslenI denne torsdag, 19 marts, 2020 filbillede, folk står i en gang med tomme hylder i et supermarked i London, midt i panikkøb på grund af coronavirus-udbruddet. En pandemi, der tvinger alle til at blive
Online købmandstjenester kæmper for at imødekomme stigningen i efterspørgslenI denne torsdag, 19 marts, 2020 filbillede, folk står i en gang med tomme hylder i et supermarked i London, midt i panikkøb på grund af coronavirus-udbruddet. En pandemi, der tvinger alle til at blive
- Test til reduktion af sukker
- Nogle havbundsmikrober kan tage varmen:Her er hvad de spiser
- Sudoku røntgen afslører bevægelser inden for uigennemsigtige materialer
- Southwest forlænger MAX-jordforbindelse indtil april 2020
- Sådan reverserer polerne på en Magnet
- Hvordan Venus og Mars kan lære os om Jorden