


Smarte mikrorobotter lærer at svømme og navigere med kunstig intelligens
Kredit:New Jersey Institute of Technology
Forskere fra Santa Clara University, New Jersey Institute of Technology og University of Hong Kong har med succes lært mikrorobotter at svømme via dyb forstærkningslæring, hvilket markerer et væsentligt spring i udviklingen af mikrosvømmeevne.
Der har været en enorm interesse for at udvikle kunstige mikrosvømmere, der kan navigere i verden på samme måde som naturligt forekommende svømmemikroorganismer, såsom bakterier. Sådanne mikrosvømmere giver løfte om en bred vifte af fremtidige biomedicinske applikationer, såsom målrettet lægemiddellevering og mikrokirurgi. Alligevel kan de fleste kunstige mikrosvømmere til dato kun udføre relativt simple manøvrer med faste bevægelige gangarter.
I forskernes undersøgelse offentliggjort i Communications Physics , mente de, at mikrosvømmere kunne lære - og tilpasse sig skiftende forhold - gennem AI. Ligesom mennesker, der lærer at svømme, kræver forstærkningslæring og feedback for at holde sig flydende og drive i forskellige retninger under skiftende forhold, så skal mikrosvømmere også gøre det, dog med deres unikke sæt af udfordringer pålagt af fysikken i den mikroskopiske verden.
"At være i stand til at svømme i mikroskalaen i sig selv er en udfordrende opgave," sagde On Shun Pak, lektor i maskinteknik ved Santa Clara University. "Når du vil have en mikrosvømmer til at udføre mere sofistikerede manøvrer, kan designet af deres bevægelige gangarter hurtigt blive uoverskueligt."
Ved at kombinere kunstige neurale netværk med forstærkende læring lærte holdet med succes en simpel mikrosvømmer at svømme og navigere i enhver vilkårlig retning. Når svømmeren bevæger sig på bestemte måder, får den feedback på, hvor god den særlige handling er. Svømmeren lærer derefter gradvist, hvordan man svømmer, baseret på sine erfaringer med at interagere med det omgivende miljø.
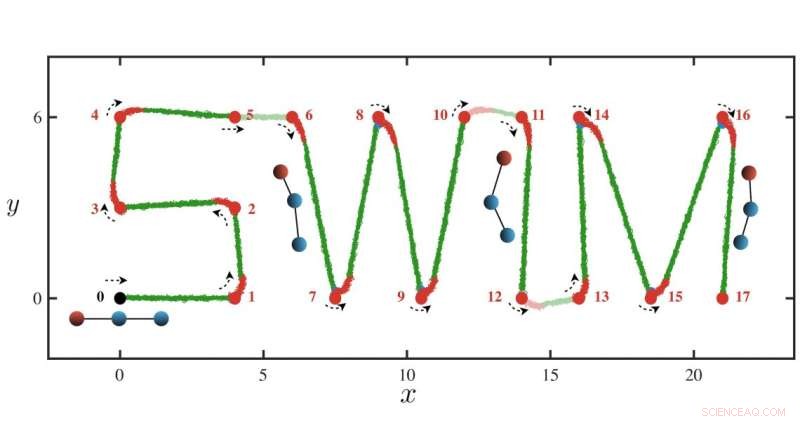
"I lighed med et menneske, der lærer at svømme, lærer mikrosvømmeren at flytte sine 'kropsdele' - i dette tilfælde tre mikropartikler og strækbare led - for at selvkøre og dreje," siger Alan Tsang, assisterende professor i maskinteknik ved Universitetet i Hong Kong. "Det gør det uden at stole på menneskelig viden, men kun på en maskinlæringsalgoritme."
Som en demonstration af svømmerens kraftfulde evne viste forskerne, at den kunne følge en kompleks vej uden at være eksplicit programmeret. De demonstrerede også svømmerens robuste præstation ved at navigere under forstyrrelser, der opstår fra eksterne væskestrømme.
"Dette er vores første skridt i at tackle udfordringen med at udvikle mikrosvømmere, der kan tilpasse sig som biologiske celler i at navigere i komplekse miljøer autonomt," sagde Yuan-nan Young, professor i matematiske videnskaber ved New Jersey Institute of Technology.
Sådan adaptiv adfærd er afgørende for fremtidige biomedicinske anvendelser af kunstige mikrosvømmere i komplekse medier med ukontrollerede og uforudsigelige miljøfaktorer.
"Dette arbejde er et nøgleeksempel på, hvordan den hurtige udvikling af kunstig intelligens kan udnyttes til at tackle uløste udfordringer i bevægelsesproblemer i væskedynamik," sagde Arnold Mathijssen, ekspert i mikrorobotter og biofysik ved University of Pennsylvania, som ikke var involveret. i forskningen. "Integrationen mellem maskinlæring og mikrosvømmere i dette arbejde vil udløse yderligere forbindelser mellem disse to meget aktive forskningsområder."
 Varme artikler
Varme artikler
-
 Google lukker cloud-spiltjenesten StadiaWedbush Securities-analytiker Michael Pachter sagde, at Stadia Cloud-spiltjenesten, som snart skulle være frakoblet, var en god idé med en dårlig forretningsmodel, der lider af mangel på titler til ab
Google lukker cloud-spiltjenesten StadiaWedbush Securities-analytiker Michael Pachter sagde, at Stadia Cloud-spiltjenesten, som snart skulle være frakoblet, var en god idé med en dårlig forretningsmodel, der lider af mangel på titler til ab -
 Første kunstige intelligens Google Doodle indeholder BachDette billede fra Google viser den animerede Google Doodle torsdag, 21. marts 2019. Google fejrer komponisten Johann Sebastian Bach med sin første kunstige intelligens-drevne Doodle. Google siger, at
Første kunstige intelligens Google Doodle indeholder BachDette billede fra Google viser den animerede Google Doodle torsdag, 21. marts 2019. Google fejrer komponisten Johann Sebastian Bach med sin første kunstige intelligens-drevne Doodle. Google siger, at -
 At leve med kunstig intelligens - hvordan får vi det rigtigt?Kredit:GIC på Stocksy Kraftfuld AI skal være pålideligt tilpasset menneskelige værdier. Betyder det, at AI i sidste ende bliver nødt til at politi disse værdier? Cambridge filosoffer Huw Price og
At leve med kunstig intelligens - hvordan får vi det rigtigt?Kredit:GIC på Stocksy Kraftfuld AI skal være pålideligt tilpasset menneskelige værdier. Betyder det, at AI i sidste ende bliver nødt til at politi disse værdier? Cambridge filosoffer Huw Price og -
 Privatlivsrettigheder kan blive det næste offer for en morderpandemiCoronavirus-pandemien har ført til oprettelsen af apps og sporingssystemer, der bruger folks smartphone-placering som en del af bestræbelserne på at begrænse smitte Digital overvågning og smartp
Privatlivsrettigheder kan blive det næste offer for en morderpandemiCoronavirus-pandemien har ført til oprettelsen af apps og sporingssystemer, der bruger folks smartphone-placering som en del af bestræbelserne på at begrænse smitte Digital overvågning og smartp
- Gummiaffald strøer kilometervis af Puyallup-floden, efter at kunstgræs blev brugt i dæmningsproje…
- The Lost Art of True Damascus Steel
- Vedligeholdelse af veje med drue og landbrugsaffald
- Dyrelivet i grøfterne har brug for en detox-kur
- Kom nøglebyggesten til livet fra det dybe rum?
- Udvikling af næste generation af kunstige synshjælpemidler