


Hvordan man hjælper samlebåndsrobotter med at skifte gear og hente næsten alt
Kredit:University of Washington
I begyndelsen af COVID-19-pandemien flyttede bilfremstillingsvirksomheder som Ford hurtigt deres produktionsfokus fra biler til masker og ventilatorer.
For at gøre dette skifte muligt, var disse virksomheder afhængige af folk, der arbejdede på et samlebånd. Det ville have været for udfordrende for en robot at foretage denne overgang, fordi robotter er bundet til deres sædvanlige opgaver.
Teoretisk set kunne en robot opfange næsten alt, hvis dens gribere kunne skiftes ud til hver opgave. For at holde omkostningerne nede kunne disse gribere være passive, hvilket betyder, at gribere opsamler genstande uden at ændre form, ligesom tangen på en gaffeltruck fungerer.
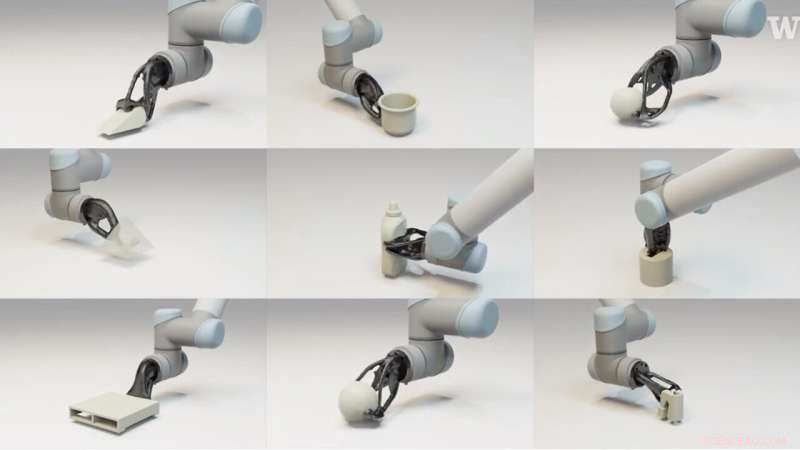
Et team fra University of Washington har skabt et nyt værktøj, der kan designe en 3D-printbar passiv griber og beregne den bedste vej til at samle et objekt op. Holdet testede dette system på en suite af 22 objekter - inklusive en 3D-printet kanin, en dørstop-formet kile, en tennisbold og en boremaskine. De designede gribere og stier var vellykkede for 20 af objekterne. To af disse var kilen og en pyramideform med et buet nøglehul. Begge former er udfordrende for flere typer gribere at samle op.
Holdet vil præsentere disse resultater den 11. august på SIGGRAPH 2022.
"Vi producerer stadig de fleste af vores varer med samlebånd, som er virkelig fantastiske, men også meget stive. Pandemien viste os, at vi skal have en måde, hvorpå vi nemt kan genbruge disse produktionslinjer," siger seniorforfatter Adriana Schulz, en UW adjunkt i Paul G. Allen School of Computer Science &Engineering. "Vores idé er at skabe tilpasset værktøj til disse produktionslinjer. Det giver os en meget simpel robot, der kan udføre én opgave med en bestemt griber. Og når jeg så ændrer opgaven, udskifter jeg bare griberen."
Passive gribere kan ikke justeres, så de passer til det objekt, de samler op, så traditionelt er genstande designet til at matche en specifik griber.
"Den mest succesrige passive griber i verden er tængerne på en gaffeltruck. Men afvejningen er, at gaffeltrucks tænger kun fungerer godt med specifikke former, såsom paller, hvilket betyder, at alt, du vil gribe, skal være på en palle," sagde medforfatter Jeffrey Lipton, UW assisterende professor i maskinteknik. "Her siger vi 'Okay, vi ønsker ikke at foruddefinere geometrien af den passive griber'. I stedet vil vi tage ethvert objekts geometri og designe en griber."
For enhver given genstand er der mange muligheder for, hvordan dens griber kunne se ud. Derudover er griberens form knyttet til den vej, robotarmen tager for at samle genstanden op. Hvis den er designet forkert, kan en griber styrte ind i genstanden på vej til at samle den op. For at løse denne udfordring havde forskerne et par vigtige indsigter.
"Punkterne, hvor griberen kommer i kontakt med objektet, er essentielle for at bevare objektets stabilitet i grebet. Vi kalder dette sæt af punkter 'grebskonfigurationen'," sagde hovedforfatter Milin Kodnongbua, der afsluttede denne forskning som UW bachelorstuderende i Allen Skolen. "Derudover skal griberen kontakte objektet på de givne punkter, og griberen skal være en enkelt solid genstand, der forbinder kontaktpunkterne med robotarmen. Vi kan søge efter en indsatsbane, der opfylder disse krav."
Når teamet designer en ny griber og bane, starter teamet med at give computeren en 3D-model af objektet og dets orientering i rummet – hvordan det for eksempel vil blive præsenteret på et transportbånd.
"Først genererer vores algoritme mulige grebskonfigurationer og rangerer dem baseret på stabilitet og nogle andre målinger," sagde Kodnongbua. "Så tager den den bedste mulighed og co-optimerer for at finde ud af, om en indsættelsesbane er mulig. Hvis den ikke kan finde en, så går den til den næste grebskonfiguration på listen og forsøger at lave co-optimeringen igen."
Når computeren har fundet et godt match, udsender den to sæt instruktioner:en til en 3D-printer til at skabe griberen og en med banen til robotarmen, når griberen er udskrevet og fastgjort.
Holdet valgte en række forskellige objekter for at teste metodens kraft, herunder nogle fra et datasæt af objekter, der er standarden for at teste en robots evne til at udføre manipulationsopgaver.
"Vi har også designet genstande, der ville være udfordrende for traditionelle griberobotter, såsom genstande med meget lave vinkler eller genstande med indre greb - hvor du skal samle dem op med indsættelse af en nøgle," sagde medforfatter Ian Good, en UW ph.d.-studerende i maskinteknisk afdeling.
Forskerne udførte 10 test pickupper med 22 former. For 16 former var alle 10 pickups succesfulde. Mens de fleste former havde mindst én vellykket pickup, havde to det ikke. Disse fejl skyldtes problemer med 3D-modellerne af de objekter, der blev givet til computeren. For det første - en skål - beskrev modellen siderne af skålen som tyndere, end de var. For den anden – en genstand, der ligner en kop med et ægformet håndtag – havde modellen ikke sin korrekte orientering.
Algoritmen udviklede de samme gribende strategier for lignende formede objekter, selv uden nogen menneskelig indgriben. Forskerne håber, at det betyder, at de vil være i stand til at skabe passive gribere, der kan opfange en klasse af objekter, i stedet for at skulle have en unik griber for hvert objekt.
En begrænsning ved denne metode er, at passive gribere ikke kan designes til at opfange alle genstande. Selvom det er nemmere at samle genstande op, der varierer i bredde eller har udragende kanter, er genstande med ensartet glatte overflader, såsom en vandflaske eller en kasse, svære at få fat i uden bevægelige dele.
Alligevel blev forskerne opfordret til at se algoritmen klare sig så godt, især med nogle af de mere vanskelige former, såsom en søjle med et nøglehul i toppen.
"Den sti, som vores algoritme kom frem til for den, er en hurtig acceleration ned til, hvor den kommer helt tæt på objektet. Det så ud som om det skulle smadre ind i objektet, og jeg tænkte:"Åh nej. Hvad hvis vi ikke kalibrerede den rigtigt?'" sagde Good. "Og så kommer den selvfølgelig utrolig tæt på og så opfanger den perfekt. Det var dette ærefrygtindgydende øjeblik, en ekstrem rutschebane af følelser."
Yu Lou, der afsluttede denne forskning som kandidatstuderende på Allen School, er også medforfatter på dette papir.
 Varme artikler
Varme artikler
-
 Nukleare materialer udviklet til en bæredygtig fremtidKredit:P.Stroppa/CEA Et EU-finansieret projekt har fremmet forbindelser mellem nationale og europæiske programmer for at harmonisere og implementere videnskabelig og teknisk forskning i materialer
Nukleare materialer udviklet til en bæredygtig fremtidKredit:P.Stroppa/CEA Et EU-finansieret projekt har fremmet forbindelser mellem nationale og europæiske programmer for at harmonisere og implementere videnskabelig og teknisk forskning i materialer -
 Gør (sjovt) spil med flere spillere til en lærerig oplevelseDette stillbillede er fra en prototype af spillet Crystal Island:EcoJourneys. Spillet blev lavet ved hjælp af en ny ramme, der integrerer narrativ-centreret læring og kollaborative læringsteknikker fo
Gør (sjovt) spil med flere spillere til en lærerig oplevelseDette stillbillede er fra en prototype af spillet Crystal Island:EcoJourneys. Spillet blev lavet ved hjælp af en ny ramme, der integrerer narrativ-centreret læring og kollaborative læringsteknikker fo -
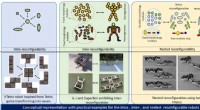 En ramme til at evaluere og sammenligne selvrekonfigurerbare robotsystemerKredit:Tan et al. Selvrekonfigurerbare robotter (SRRer), der automatisk kan ændre form og tilpasse sig deres omgivende miljø, har for nylig tiltrukket sig stor interesse inden for robotforskningsm
En ramme til at evaluere og sammenligne selvrekonfigurerbare robotsystemerKredit:Tan et al. Selvrekonfigurerbare robotter (SRRer), der automatisk kan ændre form og tilpasse sig deres omgivende miljø, har for nylig tiltrukket sig stor interesse inden for robotforskningsm -
 Fælles WiFi kan registrere våben, bomber og kemikalier i poserBrug af almindelig WiFi, dette billige mistænkelige objektdetekteringssystem kan registrere våben, bomber og eksplosive kemikalier i poser, rygsække og bagage. Kredit:Dataanalyse og informationssikker
Fælles WiFi kan registrere våben, bomber og kemikalier i poserBrug af almindelig WiFi, dette billige mistænkelige objektdetekteringssystem kan registrere våben, bomber og eksplosive kemikalier i poser, rygsække og bagage. Kredit:Dataanalyse og informationssikker
- Field-cycling relaxometry kan vurdere tumorstatus ved at måle hastigheden af cellulær vandudveks…
- Vil elbiler fortsat hovedsageligt være for velhavende købere?
- Video:Isolation i Antarktis
- Bot kan slå mennesker i multiplayer skjulte rollespil
- Hvad er det første skridt i dekodning af genetiske meddelelser?
- Lægemiddelleverende nanopartikler søger og ødelægger undvigende kræftstamceller