


Pulsdrevet robot:Bevægelse via solitære bølger
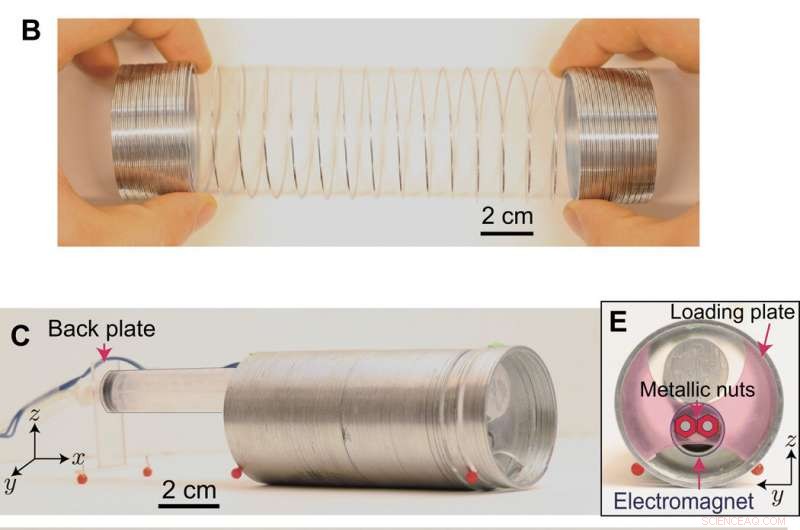
Slinky-robotten. (A) skematisk viser lokomotiv mekanisme af en regnorm baseret på retrograd peristaltiske bølger (dvs. bølger, der forplanter sig i den modsatte retning af bevægelse). (B) Billede af metallisk Slinky brugt i denne undersøgelse. (C og D) Billeder af vores Slinky-robot (C) før og (D) efter at den pneumatiske aktuator er forlænget. (E) Set forfra af Slinky-robotten, der viser elektromagneten. Bemærk, at flere røde plastkugler er limet fast på Slinky for at forhindre, at den ruller. Fotokredit:Bolei Deng, Harvard Universitet. Kredit:Science Advances, doi:10.1126/sciadv.aaz1166
Forskere har for nylig undersøgt de unikke egenskaber ved ikke -lineære bølger for at lette en bred vifte af applikationer, herunder slagreduktion, asymmetrisk transmission, skifte og fokusere. I en ny undersøgelse, der nu er offentliggjort på Videnskabens fremskridt , Bolei Deng og et team af forskere ved Harvard, CNRS og Wyss Institute for Biologically Inspired Engineering i USA og Frankrig udnyttede udbredelsen af ikke-lineære bølger for at få fleksible strukturer til at kravle. De kombinerede bioinspirerede eksperimentelle og teoretiske metoder for at vise, hvordan en sådan pulsdrevet bevægelse kunne nå en maksimal effektivitet, når de initierede pulser var solitoner (ensom bølge). Den enkle maskine, der blev udviklet i arbejdet, kunne bevæge sig hen over en bred vifte af overflader og styre videre. Undersøgelsen udvidede rækken af mulige applikationer med ikke-lineære bølger for at tilbyde en ny platform for fleksible maskiner.
Fleksible strukturer, der er i stand til store deformationer, tiltrækker interesse for bioteknik på grund af deres spændende statiske respons og deres evne til at understøtte elastiske bølger med stor amplitude. Ved omhyggeligt at kontrollere deres geometri, det elastiske energilandskab i stærkt deformerbare systemer kan konstrueres til at udbrede en række ikke-lineære bølger, herunder vektorsolitoner, overgangsbølger og sjældne pulser. Den dynamiske opførsel af sådanne strukturer demonstrerer en meget rig fysik, samtidig med at det giver nye muligheder for at manipulere udbredelsen af mekaniske signaler. Sådanne mekanismer kan tillade ensrettet udbredelse, bølgeleder, mekanisk logik og afbødning, blandt andre applikationer.
I dette arbejde, Deng et al. var inspireret af den biologiske retrograde peristaltiske bølgebevægelse i regnorme og lineære elastiske bølgers evne til at generere bevægelse i ultralydsmotorer. Teamet viste spredning af ikke -lineære elastiske bølger i fleksible strukturer for at give mulighed for bevægelse. Som proof of concept, de fokuserede på en Slinky – og brugte den til at skabe en pulsdrevet robot, der var i stand til at drive sig selv frem. De byggede den enkle maskine ved at forbinde Slinky til en pneumatisk aktuator. Teamet brugte en elektromagnet og en plade indlejret mellem sløjferne til at starte ikke -lineære pulser til at sprede sig langs enheden fra forsiden til bagsiden, lader pulsretningaliteten diktere den simple robot til at bevæge sig fremad. Resultaterne angav effektiviteten af en sådan pulsdreven bevægelse til at være optimal med solitons-ikke-lineære pulser med stor amplitude med en konstant hastighed og stabil form langs forplantning. Undersøgelsen udvidede anvendelserne af solitære bølger (solitoner), mens de viste, hvordan de kan udforskes som simple underliggende motorer til at hjælpe fleksible maskiner med at bevæge sig.
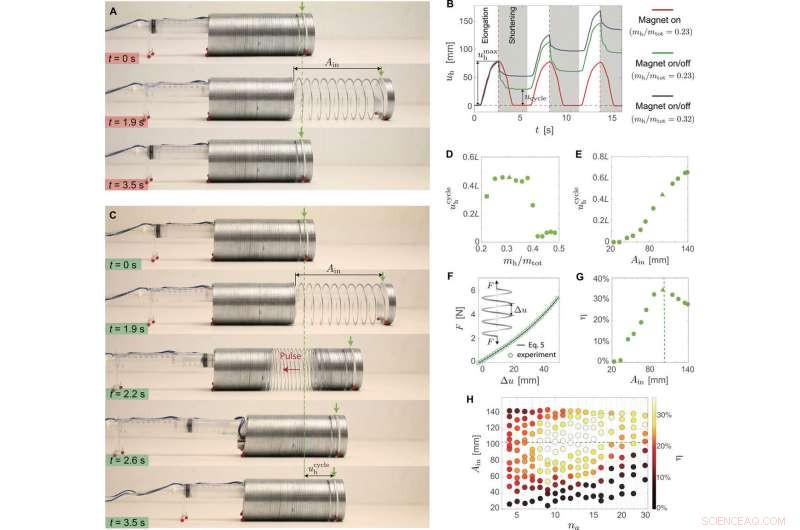
Slinky-robottens ydeevne. (A) Snapshots taget under en test, hvor vi forlænger de forreste 10 sløjfer til Ain =100 mm, mens vi holder elektromagneten tændt. (B) Forskydning af hovedet i løbet af tre cyklusser for test, hvor (i) mh/mtot =0,23 og vi holder elektromagneten tændt (rød linje), (ii) mh/mtot =0,23, og vi slukker elektromagneten efter strækning (grøn linje), og (iii) mh/mtot =0,32 og vi slukker for elektromagneten efter strækning (blå linje). (C) Snapshots taget under en test, hvor Ain =100 mm, og vi slukker elektromagneten efter at have strakt de forreste sløjfer. (D) Udvikling af u cyklus h som funktion af mh/mtot for tests, hvor Ain =100 mm. De firkantede og trekantede markører svarer til mh/mtot =0,23 og 0,32, henholdsvis. (E) Udvikling af u-cyklus h som funktion af Ain for tests, hvor mh/mtot =0,32. Den trekantede markør svarer til Ain =100 mm. (F) Statisk respons af Slinky målt i en uniakset test. (G) Udvikling af η som funktion af Ain for test, hvor mh/mtot =0,32. De trekantede markører svarer til Ain =100 mm. Den grønne stiplede linje svarer til amplituden af den understøttede soliton, Som. (H) Udvikling af η som funktion af na og Ain for test, hvor mh/mtot =0,32. Billedkredit:Bolei Deng, Harvard Universitet. Kredit:Science Advances, doi:10.1126/sciadv.aaz1166
For at oprette Slinky -robotten, Deng et al. brugt en metal Slinky med en længde på 50 mm og 90 løkker, for derefter at teste og forstå, hvordan man udforsker dens iboende fleksibilitet, og skabe en enkel maskine, der er i stand til at bevæge sig. De koblede to slinkies i serie (100 mm, 180 sløjfer) til en simpel aktiveringsstrategi baseret på en pneumatisk aktuator, en elektromagnet og tre akrylplader. De kunne strække og forkorte opsætningen ved hjælp af den pneumatiske aktuator, mens elektromagneten blev tændt. Teamet testede maskinens respons ved at placere den på en glat overflade og overvåge den med et højhastighedskamera. Deng et al. slukkede derefter magnetfeltet i et forsøg på at bryde symmetrien og få maskinen til at kravle. De observerede ikke en reflekteret bølge i Slinky på grund af den store energidissipation ved kollision af løkkerne og observerede i stedet tydelig fremadgående bevægelse af robotten. Holdet undersøgte derfor retningsbestemmelsen introduceret af de elastiske bølger for at få robotten til at bevæge sig - selv i nærvær af identiske friktionskoefficienter.
Udbredelse af ikke-lineære bølger. En slinky med 90 løkker løftes fra underlaget og understøttes af en plaststang for at minimere friktionen. Ved at forstrække 10 løkker nær fronten og slukke for den magnetiske elektromagnet starter vi elastiske bølger, der forplanter sig mod bagsiden. De grønne markører bruges til at spore forskydningen af hver anden sløjfe. Se hele filmen på Credit:Science Advances, doi:10.1126/sciadv.aaz1166
Forsøg på at få den fleksible maskine til at kravle via elastiske impulser afslørede imidlertid, at de eksperimentelle forhold var suboptimale. For eksempel, de bemærkede tilbageskridt umiddelbart efter at have slukket for elektromagneten. For at begrænse denne bevægelse, Deng et al. øgede massen i spidsen af Slinky-robotten, mens værdien blev optimeret for at identificere et optimalt område. Slinky fastholdt 10 sløjfer mellem fronten og lastepladerne i opsætningen. Holdet udpegede den maksimale afstand mellem lastning og frontplader som A i , som var cirka 100 mm. For at forstå, hvordan robotens effektivitet var et maksimum for A i =100 mm Deng et al. omhyggeligt undersøgt udbredelsen af store amplituden pulser gennem Slinky.
Til disse eksperimenter, de fokuserede på en enkelt Slinky og overvågede positionen af grønne markører placeret ved hver anden sløjfe. De påbegyndte derefter elastiske bølger, der forplantede sig mod bagsiden ved at forstrække 10 løkker nær fronten og slukke for elektromagneten. Testene gjorde det muligt for holdet at indsamle dybere indsigt i udbredelsen af pulser ved at overvåge forskydningen af hver sløjfe. Forskerne indså to hovedtræk ved robotten; 1) de bagud-udbredte bølger flyttede Slinky'ens massecenter fremad, og 2) Slinky'en understøttede udbredelsen af solitære bølger med stor amplitude.
For na =4 er impulserne for stærke, og deres energi spredes via kollisioner mellem løkkerne. For na =30 er pulserne for svage og udbreder sig knap. Se hele filmen på Credit:Science Advances, doi:10.1126/sciadv.aaz1166
For at få yderligere indsigt i de eksperimentelle resultater, Deng et al. udviklet en matematisk model, der repræsenterede massen og elasticiteten af en individuel sløjfe. De beregnede resultater matchede ekstremt godt med de eksperimentelle resultater, og modellen bekræftede de eksperimentelle observationer. Analysen bekræftede yderligere, at effektiviteten af Slinky-robotten var på et maksimum, når de initierede bølger var solitoner. Ensomme impulsers ikke-spredende karakter og kompakthed gjorde dem ekstremt effektive til at overføre energien fra den pneumatiske aktuator til bevægelse for at opnå den mest effektive pulsdrevne bevægelse.
På denne måde Deng et al. viste, hvordan solitoner, der forplanter sig bagud, effektivt kunne flytte en Slinky-robot fremad. Selvom organismer uden lemmer tidligere har bioinspireret ingeniører til at designe en række robotter, holdet mener, at dette arbejde er det første robotsystem, der er afhængig af elastiske impulser for at bevæge sig. Principperne præsenteret i undersøgelsen var forskellige fra dem, der bruges af ultralydsmotorer, da den fleksible Slinky-robot brugte ikke-lineære pulsbølger til at ændre positionen af massecentret, ultralydsmotorer drives derimod af lineære sinusformede bølger. Teamet fokuserede kun på retlinet fremad kravling i dette arbejde, men de kan udforske Slinkys fleksibilitet for at opnå en række bevægelser.
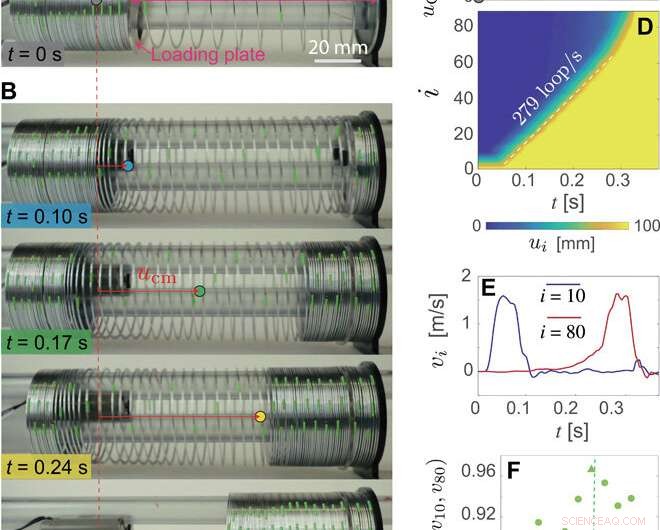
Bølgeudbredelse i Slinky. (A) Eksperimentel opsætning brugt til at teste udbredelsen af impulser i den metalliske Slinky. Ved t =0 s, na =10 løkker mellem ladepladen og fronten af Slinky strækkes til Ain =100 mm. (B) øjebliksbilleder af forplantningen af pulsen i Slinky ved t =0,10, 0,17, 0,24, og 0,34 s. De cirkulære markører angiver positionerne for Slinkyens massecenter. (C) Forskydning af Slinkyens massecenter, uCM, som en funktion af tiden. Cirkulære markører svarer til de tidspunkter, der betragtes i (A) og (B). (D) Spatiotemporal forskydningsdiagram af udbredelsesimpulsen. (E) Hastighedssignaler målt ved 10. og 80. sløjfe. (F) Udvikling af krydskorrelationen af v10 (t) og v80 (t) som funktion af indgangsamplituden Ain. Den trekantede markør svarer til Ain =100 mm. Den grønne stiplede linje svarer til amplituden af den understøttede soliton, Som, forudsagt af ligninger afledt i undersøgelsen. Billedkredit:Bolei Deng, Harvard Universitet. Kredit:Science Advances, doi:10.1126/sciadv.aaz1166
Holdet agter derefter at styre robotten ved at dreje den sidste løkke på bagsiden af enheden og kontrollere styrevinklen, samtidig med at man understreger den eksisterende mulighed for at flytte robotten hen over en bred vifte af overflader. Selvom Deng et al. brugte kun en Slinky til at realisere pulsdreven bevægelse i dette arbejde, principperne er generelle og kan udvides til en bred vifte af strækbare systemer på tværs af skalaer til åbne veje for mikroskala -crawlers, der er velegnede til medicinske anvendelser.
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Epidemier:Afslutningen på indeslutningsforanstaltninger?H1N1 virus. Kredit:C. S. Goldsmith og A. Balish, CDC Når et epidemiudbrud som H1N1, Zika- eller SARS-virus forekommer, indeslutningsforanstaltninger kan synes at være den mest rimelige løsning. Im
Epidemier:Afslutningen på indeslutningsforanstaltninger?H1N1 virus. Kredit:C. S. Goldsmith og A. Balish, CDC Når et epidemiudbrud som H1N1, Zika- eller SARS-virus forekommer, indeslutningsforanstaltninger kan synes at være den mest rimelige løsning. Im -
 Sådan laver du en sammensat maskine til en tredje grad Science ProjectNæsten hvert eneste værktøj, vi bruger i vores daglige liv, er en sammensat maskine. En sammensat maskine er blot en kombination af to eller flere enkle maskiner. De enkle maskiner er håndtaget, kilen
Sådan laver du en sammensat maskine til en tredje grad Science ProjectNæsten hvert eneste værktøj, vi bruger i vores daglige liv, er en sammensat maskine. En sammensat maskine er blot en kombination af to eller flere enkle maskiner. De enkle maskiner er håndtaget, kilen -
 Model identificerer en høj grad af udsving i gluoner som afgørende for at forklare protonstrukture…Fire øjebliksbilleder produceret af en model, der repræsenterer fluktuerende gluontæthed i en proton ved høj energi, med rød, der angiver høj gluondensitet og blå, der angiver lav densitet. At forstå
Model identificerer en høj grad af udsving i gluoner som afgørende for at forklare protonstrukture…Fire øjebliksbilleder produceret af en model, der repræsenterer fluktuerende gluontæthed i en proton ved høj energi, med rød, der angiver høj gluondensitet og blå, der angiver lav densitet. At forstå -
 Videnskabsprojekter om tandblekningEt af de enkleste videnskabelige projekter for en studerende er at undersøge virkningerne af blegningsprodukter. Det er et tiltalende emne, fordi der er så mange produkter på markedet, at det ikke
Videnskabsprojekter om tandblekningEt af de enkleste videnskabelige projekter for en studerende er at undersøge virkningerne af blegningsprodukter. Det er et tiltalende emne, fordi der er så mange produkter på markedet, at det ikke
- Organsystemer involveret i homeostase
- EU-bilproducenter puster emissionerne op for at skæve kulstofmålene
- Mange stater mangler valgfleksibilitet, der er nødvendig for at håndtere pandemiske sikkerhedsprob…
- Målrettede Facebook-annoncer viste sig at være yderst effektive ved det amerikanske præsidentvalg…
- Erhvervsmæssig kønsbias udbredt i onlinebilleder, undersøgelse finder
- En satellit med en harpun, net og træk sejl for at fange rumskrot er i kredsløb og vil snart blive…