


Indendørs højpræcisionspositioneringssystem for synligt lys, der bruger ikke-line-of-sight-metoden

Modellen af binokulært stereosyn. Kredit:Optics Express (2022). DOI:10.1364/OE.470391
Lokationsbaserede tjenester bliver stadig vigtigere i indendørs miljøer med udviklingen af Internet-of-thing (IoT) teknologier. Systemet til positionering af synligt lys (VLP) tilbyder et stort potentiale på grund af dets immunitet over for radiofrekvensinduceret elektromagnetisk interferens, et frit og ubegrænset spektrum og et meget højere sikkerhedsniveau.
For nylig er en masse forskningsarbejde på line-of sight (LOS) VLP blevet demonstreret med høj nøjagtighed til meget lave omkostninger. Men for LOS VLP er blokering og skyggelægning et stort problem; og der er krav om et stort antal lysdioder. Få metoder til at løse dette problem er blevet undersøgt.
I en undersøgelse offentliggjort i Optics Express , Dr. Lin Bangjiangs gruppe fra Fujian Institute of Research on the Structure of Matter af det kinesiske videnskabsakademi foreslog et non-line of sight (NLOS) VLP-system ved hjælp af et kikkertkamera og en enkelt lysdiode (LED) . Den kan realisere 3D-højpræcisionspositionering af en vilkårlig kropsholdning af det reflekterede lys fra gulvet.
Forskerne foreslog en systemmodel, der består af to funktionsmoduler:et NLOS optisk kamerakommunikationsmodul (OCC) og et binokulært stereosynsmodul. Førstnævnte bruger reflektionerne til at modtage koordinatinformationen for LED'en ved hjælp af en forbedret OCC-signalgendannelsesmodel. Og den senere estimerer kameraets position ved hjælp af en foreslået binokulær positionsvurderingsalgoritme, som er baseret på principperne for binokulært stereosyn.
De foreslog derefter en fejlkompensationsalgoritme for at optimere systemets fejl på z-aksen, hvilket er nøgleproblemet med dybdeestimering for kikkertkameraet, at fejlen på z-aksen er langt større end den på x og y akser.
Derudover designede forskerne en eksperimentel testbed og valgte en STM32 mikrocontrollerenhed til at drive en LED. Ved modtageren brugte de et kikkertkamera til at fange det reflekterede lys fra jorden ved to forskellige eksponeringstilstande (en lang og en kort).
De opnåede LED-positionen af NLOS OCC-modulet ved at bruge det korte eksponeringsbillede og fik pixelkoordinaterne for projektionen af LED'en reflekteret af jorden i det lange eksponeringsbillede. En inertimåleenhed er fastgjort sammen med kikkertkameraet for at måle dets positur.
Ved hjælp af denne information beregnede forskerne fejlen mellem den estimerede værdi og den målte værdi af kameraets position.
Denne undersøgelse overvinder udfordringen med at skygge/blokere LOS-forbindelserne, realiserer 3D vilkårlig holdningspositionering med det mindste antal beacons (kun enkelt LED), og forbedrer i høj grad anvendeligheden af VLP. + Udforsk yderligere
Kikkertsyn-baserede UAV'er autonome luftoptankningsplatform – piloter er ikke længere nødvendige
 Varme artikler
Varme artikler
-
 Sådan beregnes væskevolumenDet er normalt ret let at beregne væskemængden i en beholder med en regelmæssig form, f.eks. En cylinder eller terning. Alt hvad du skal gøre er at bruge den passende matematiske ligning til at beregn
Sådan beregnes væskevolumenDet er normalt ret let at beregne væskemængden i en beholder med en regelmæssig form, f.eks. En cylinder eller terning. Alt hvad du skal gøre er at bruge den passende matematiske ligning til at beregn -
 Hvorfor sletning kunne være nøglen til praktisk kvanteberegningOversigt over en fejltolerant neutral atom kvantecomputer, der bruger slettekonvertering. a Skematisk af en neutral atom kvantecomputer, med et plan af atomer under et mikroskopobjektiv, der bruges ti
Hvorfor sletning kunne være nøglen til praktisk kvanteberegningOversigt over en fejltolerant neutral atom kvantecomputer, der bruger slettekonvertering. a Skematisk af en neutral atom kvantecomputer, med et plan af atomer under et mikroskopobjektiv, der bruges ti -
 Hvilke smarte hazmatdragter og Sonora kaktusskind har tilfællesBillede af en stikkende pære taget i en forhave i Arizona sammen med et optisk profilometribillede, der afslører revnerne i overhuden. Kredit:Konrad Rykaczewski Da Konrad Rykaczewski flyttede til
Hvilke smarte hazmatdragter og Sonora kaktusskind har tilfællesBillede af en stikkende pære taget i en forhave i Arizona sammen med et optisk profilometribillede, der afslører revnerne i overhuden. Kredit:Konrad Rykaczewski Da Konrad Rykaczewski flyttede til -
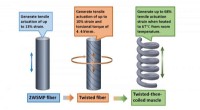 Kunstige muskler viser mere fleksibilitetDette er fremstillingsproceduren og aktiveringen af oprullet kunstig muskel baseret på tovejsformet hukommelsespolymerfiber. Kredit:Louisiana State University Kunstige muskler opnåede betydelige
Kunstige muskler viser mere fleksibilitetDette er fremstillingsproceduren og aktiveringen af oprullet kunstig muskel baseret på tovejsformet hukommelsespolymerfiber. Kredit:Louisiana State University Kunstige muskler opnåede betydelige
- Ariane 5-raket sætter europæiske GPS-satellitter i kredsløb
- Plymouth -opstart opretter One Spot -app til effektivisering af ejendomsadministratorers arbejde
- Er naturgas en god energikilde?
- Hvad er princippet om fossilopfyldelse?
- Hvad sker der med bier og hveps om natten?
- Variabilitet i kolde temperaturer er vigtig ved evaluering af klimaændringer