


Robotter kan ikke løbe fra dyr. En ny undersøgelse undersøger hvorfor

Spørgsmålet kan være det 21. århundredes version af fabelen om skildpadden og haren:Hvem ville vinde i et fodløb mellem en robot og et dyr?
I en artikel med nyt perspektiv satte et team af ingeniører fra USA og Canada, inklusive University of Colorado Boulder-robotiker Kaushik Jayaram, sig for at besvare denne gåde. Gruppen analyserede data fra snesevis af undersøgelser og kom til et rungende "nej". I næsten alle tilfælde ser det ud til, at biologiske organismer, såsom geparder, kakerlakker og endda mennesker, er i stand til at løbe fra deres robot-modstykker.
Forskerne, ledet af Samuel Burden ved University of Washington og Maxwell Donelan ved Simon Fraser University, offentliggjorde deres resultater i sidste uge i tidsskriftet Science Robotics .
"Som ingeniør er det en slags oprørende," sagde Jayaram, en assisterende professor i Paul M. Rady Department of Mechanical Engineering på CU Boulder. "I løbet af 200 års intens ingeniørarbejde har vi været i stand til at sende rumfartøjer til månen og Mars og så meget mere. Men det er forvirrende, at vi endnu ikke har robotter, der er væsentligt bedre end biologiske systemer til at bevæge sig i naturlige miljøer."
Han håber, at undersøgelsen vil inspirere ingeniører til at lære at bygge mere fleksible, smidige robotter. Forskerne konkluderede, at robotters manglende evne til at løbe fra dyr ikke kommer ned til mangler i et stykke maskineri, såsom batterier eller aktuatorer. I stedet, hvor ingeniører kan vakle, er at få disse dele til at fungere effektivt sammen.
Denne forfølgelse er en af Jayarams største passioner. Hans laboratorium på CU Boulder campus er hjemsted for en masse uhyggelige kravler, herunder adskillige lodne ulveedderkopper, der er omtrent på størrelse med en halv dollar.
"Ulveedderkopper er naturlige jægere," sagde Jayaram. "De lever under sten og kan løbe over komplekst terræn med utrolig fart for at fange bytte."
Han forestiller sig en verden, hvor ingeniører bygger robotter, der fungerer lidt mere som disse ekstraordinære spindlere.
"Dyr er i en eller anden forstand legemliggørelsen af dette ultimative designprincip - et system, der fungerer rigtig godt sammen," sagde han.

Kakerlakenergi
Spørgsmålet om "hvem kan løbe bedre, dyr eller robotter?" er kompliceret, fordi at køre i sig selv er kompliceret.
I tidligere forskning har Jayaram og hans kolleger ved Harvard University designet en række robotter, der søger at efterligne adfærden hos den ofte udskældte kakerlak. Holdets HAMR-Jr-model passer oven på en krone og spurter med hastigheder svarende til en gepards. Men, bemærkede Jayaram, mens HAMR-Jr kan bryde et træk frem og tilbage, bevæger den sig ikke så godt fra side til side eller over ujævnt terræn. Ydmyge kakerlakker har derimod ingen problemer med at løbe over overflader fra porcelæn til snavs og grus. De kan også slå vægge op og presse sig gennem små sprækker.

For at forstå, hvorfor en sådan alsidighed fortsat er en udfordring for robotter, opdelte forfatterne af den nye undersøgelse disse maskiner i fem undersystemer, herunder kraft, ramme, aktivering, sansning og kontrol. Til gruppens overraskelse syntes få af disse undersystemer at komme til kort med deres ækvivalenter hos dyr.
Højkvalitets lithium-ion-batterier kan for eksempel levere så meget som 10 kilowatt strøm for hvert kilogram (2,2 pund), de vejer. Dyrevæv derimod producerer omkring en tiendedel af det. Muskler kan i mellemtiden ikke komme tæt på at matche det absolutte drejningsmoment for mange motorer.
"Men på systemniveau er robotter ikke så gode," sagde Jayaram. "Vi støder ind i iboende design-afvejninger. Hvis vi forsøger at optimere til én ting, såsom fremadgående hastighed, kan vi miste noget andet, såsom vendeevne."
Edderkopsanser
Så hvordan kan ingeniører bygge robotter, der ligesom dyr er mere end blot summen af deres dele?
Dyr, bemærkede Jayaram, er ikke opdelt i separate undersystemer på samme måde som robotter. Dine quadriceps driver for eksempel dine ben frem, ligesom HAMR-Jrs aktuatorer bevæger deres lemmer. Men quads producerer også deres egen kraft ved at nedbryde fedt og sukker og inkorporere neuroner, der kan mærke smerte og tryk.
Jayaram mener, at fremtiden for robotteknologi kan komme ned på "funktionelle underenheder", der gør det samme:I stedet for at holde strømkilder adskilt fra dine motorer og printkort, hvorfor så ikke integrere dem alle i en enkelt del? I et papir fra 2015 foreslog CU Boulder computerforsker Nikolaus Correll, som ikke var involveret i den aktuelle undersøgelse, sådanne teoretiske "robotmaterialer", der fungerer mere som dine quads.
Ingeniører er stadig langt fra at nå dette mål. Nogle, som Jayaram, tager skridt i denne retning, såsom gennem hans laboratoriums Compliant Legged Articulated Robotic Insect (CLARI) robot, en flerbenet robot, der bevæger sig lidt som en edderkop. Jayaram forklarede, at CLARI er afhængig af et modulært design, hvor hvert af dets ben fungerer som en selvstændig robot med sin egen motor, sensorer og styrekredsløb. Holdets nye og forbedrede version kaldet mCLARI kan bevæge sig i alle retninger i trange rum, det første for firbenede robotter.
Det er endnu en ting, som ingeniører som Jayaram kan lære af de perfekte jægere, ulveedderkopper.
"Naturen er en virkelig nyttig lærer."
Flere oplysninger: Samuel A. Burden et al., Why animals can outrun robots, Science Robotics (2024). DOI:10.1126/scirobotics.adi9754
Journaloplysninger: Science Robotics
Leveret af University of Colorado at Boulder
 Varme artikler
Varme artikler
-
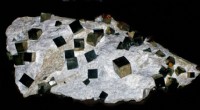 Hvad er forskellen mellem pyrit og guld?Pyrit, som denne fra Victoria-minen i Rioja, Spanien, dannes ofte i skarpt definerede terninger. Du kan forstå, hvorfor det kaldes narre guld. Universal History Archive/Universal Images Group via Gett
Hvad er forskellen mellem pyrit og guld?Pyrit, som denne fra Victoria-minen i Rioja, Spanien, dannes ofte i skarpt definerede terninger. Du kan forstå, hvorfor det kaldes narre guld. Universal History Archive/Universal Images Group via Gett -
 Magnonblokerende effekt og magnonisk hudeffekt vist i antiferromagnetisk koblet heterojunctionFig. Venstre:Skematisk diagram af magnon-forbindelsesstruktur og magnon-blokeringseffekt; Til højre:Skematisk diagram af Magnon Skin Effect. Kredit:IOP Spin bølger, eller magnoner, som elementær e
Magnonblokerende effekt og magnonisk hudeffekt vist i antiferromagnetisk koblet heterojunctionFig. Venstre:Skematisk diagram af magnon-forbindelsesstruktur og magnon-blokeringseffekt; Til højre:Skematisk diagram af Magnon Skin Effect. Kredit:IOP Spin bølger, eller magnoner, som elementær e -
 Programmerbare optiske fibre med flere kerner indstillet til at holde film og musik streaming ind i …Kredit:Shutterstock Mængden af datatrafik, der krydser verdens optiske fibernetværk, vokser med mere end 40 procent om året, efterhånden som datakrævende tjenester som streaming af lyd og video
Programmerbare optiske fibre med flere kerner indstillet til at holde film og musik streaming ind i …Kredit:Shutterstock Mængden af datatrafik, der krydser verdens optiske fibernetværk, vokser med mere end 40 procent om året, efterhånden som datakrævende tjenester som streaming af lyd og video -
 Eyes on VENUS:ORNL til at levere unik amerikansk neutronbilleddannelsesevne til videnskabelig opdage…Kunstnerisk gengivelse af VENUS -billedstrålelinjen under opbygning på ORNL’s Spallation Neutron Source. VENUS vil give effektfuld indsigt i forskningsområder som f.eks. herunder atombrændstoffer såso
Eyes on VENUS:ORNL til at levere unik amerikansk neutronbilleddannelsesevne til videnskabelig opdage…Kunstnerisk gengivelse af VENUS -billedstrålelinjen under opbygning på ORNL’s Spallation Neutron Source. VENUS vil give effektfuld indsigt i forskningsområder som f.eks. herunder atombrændstoffer såso
- Sådan laver du en 3D topografisk kort til et skoleprojekt
- Sådan figurerer du de cubiske værfter i en Circle
- Californiske kondorer vender tilbage til himlen efter næsten udryddelse
- Hvordan Taiwan bruger buddhistisk litteratur til miljøundervisning
- Støttefilm gør kryo-elektronmikroskopi skarpere
- Hvad er fordelene ved at bruge pletter til at se på celler?