


Hvad er begrænsninger i klassisk mekanik?
begrænsninger i klassisk mekanik
I klassisk mekanik er begrænsninger begrænsninger for de mulige bevægelser i et system. De begrænser de frihedsgrader, som systemet besidder, hvilket betyder, at antallet af uafhængige koordinater, der kræves for fuldt ud at beskrive dets konfiguration. Begrænsninger kan være:
1. Holonomisk:
* defineret af en ligning, der vedrører koordinaterne for systemet: Disse begrænsninger kan udtrykkes som en ligning af formen F (q₁, q₂, ..., qₙ, t) =0, hvor qᵢ er generaliserede koordinater og t er tid.
* Eksempel: En perle, der glider på en ledning, er begrænset til kun at bevæge sig langs ledningsstien, som kan beskrives ved en matematisk ligning.
2. Nonholonomic:
* kan ikke udtrykkes som en enkelt ligning, der vedrører koordinaterne: De involverer ofte uligheder eller differentialligninger.
* Eksempel: En rullende bold er underlagt ikke-holonomiske begrænsninger, fordi dens hastighed skal tilfredsstille tilstanden uden glidning, som ikke kan udtrykkes som en enkelt ligning.
Typer af begrænsninger:
* skleronomisk: Begrænsninger, der ikke afhænger af tiden.
* rheonomisk: Begrænsninger, der afhænger af tid.
* Ideal: Begrænsninger, der ikke spreder energi.
* ikke-ideal: Begrænsninger, der spreder energi (f.eks. Friktion).
Konsekvenser af begrænsninger:
* reducerede frihedsgrader: Begrænsninger reducerer antallet af uafhængige koordinater, der er nødvendige for at beskrive systemets konfiguration.
* kræfter af begrænsning: Begrænsninger kan udøve kræfter på systemet for at forhindre, at det krænker begrænsningen. Disse kræfter kaldes kræfter af begrænsning.
* Lagrange -multiplikatorer: En stærk matematisk teknik til at inkorporere begrænsninger i bevægelsesligningerne.
Eksempler på begrænsninger i virkelige verdenssystemer:
* en pendel: Pendulet Bob er begrænset til at bevæge sig langs en cirkulær bue.
* en bil på en vej: Bilen er begrænset til at bevæge sig inden for vejens grænser.
* en bold, der ruller på et bord: Bolden er begrænset til at forblive i kontakt med bordoverfladen.
Forståelse af begrænsninger er afgørende for at løse problemer i klassisk mekanik, fordi de væsentligt påvirker systemets dynamik og kræfterne, der handler på det. Ved at identificere og passende inkorporere begrænsninger i bevægelsesligningerne kan vi nøjagtigt forudsige systemets opførsel.
Sidste artikelHvilke to kræfter handler på den varme luftballon?
Næste artikelHvilken sætning beskriver hastighed?
 Varme artikler
Varme artikler
-
 Højere plasmatæthed, mere effektive tokamaksFiguren til venstre viser en stor, asymmetrisk magnetisk ø, som buler på indersiden (det vil sige den blå pil er længere end den røde), der kan føre til en afbrydelse og afslutte en plasmaudladning. D
Højere plasmatæthed, mere effektive tokamaksFiguren til venstre viser en stor, asymmetrisk magnetisk ø, som buler på indersiden (det vil sige den blå pil er længere end den røde), der kan føre til en afbrydelse og afslutte en plasmaudladning. D -
 Magnetfeltføling med høj præcisionDen meget følsomme magnetfeltsensor. Kredit:ETH Zürich / Peter Rüegg Forskere har udviklet en meget følsom sensor til at registrere små ændringer i stærke magnetiske felter. Sensoren kan finde udb
Magnetfeltføling med høj præcisionDen meget følsomme magnetfeltsensor. Kredit:ETH Zürich / Peter Rüegg Forskere har udviklet en meget følsom sensor til at registrere små ændringer i stærke magnetiske felter. Sensoren kan finde udb -
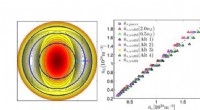
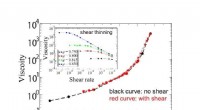 Mekanismen bag forskydningsudtynding i underkølede væskerForholdet mellem et mål for strukturel lidelse og viskositet for et polydispers hårdt kugellignende system. Forholdet mellem det strukturelle mål og viskositeten kan kollapses på deres forhold i en hv
Mekanismen bag forskydningsudtynding i underkølede væskerForholdet mellem et mål for strukturel lidelse og viskositet for et polydispers hårdt kugellignende system. Forholdet mellem det strukturelle mål og viskositeten kan kollapses på deres forhold i en hv -
 Kraft og træk rolle tydeliggjort for svømmende mikroorganismerEt øjebliksbillede af en lineær kæde af tre små kugler og en stor kugle. De enkelte kugler udfører relativ oscillerende bevægelse langs aksen. Væsken konverterer den indre relative bevægelse til bevæg
Kraft og træk rolle tydeliggjort for svømmende mikroorganismerEt øjebliksbillede af en lineær kæde af tre små kugler og en stor kugle. De enkelte kugler udfører relativ oscillerende bevægelse langs aksen. Væsken konverterer den indre relative bevægelse til bevæg
- Den kemiske formel for H20 indeholder hvor mange vandmolekyler?
- Hvilken konstellation har tre stjerner i træk?
- Dybt dyk ned i Jordens indre viser, at forandring ikke er dyb
- Sydøstasiens dis:hvad er der bag de årlige udbrud?
- Forskere opdager, hvordan 'zombieorme' borede sig ind i skeletter
- Hvad er der i en milliard? Facebook-brugere nåede milepæl 1 dag