


Astronauter skal prøvekøre en månerobot fra rumstationen
ESA-astronaut Luca Parmitano forbereder sig på ANALOG-1-eksperimentoperationer på jorden i European Astronaut Center i Köln, Tyskland. Efterforskningen vil kræve, at han fjernstyrer en jordbaseret rover fra rumstationen. Kredit:ESA
Astronauter kunne en dag fjernstyre Måne- og Mars-rovere fra kredsløb. En kommende test ombord på den internationale rumstation kan hjælpe med at gøre dette til en mulighed. I november, ESA (European Space Agency) vil udføre et eksperiment i kredsløb kendt som ANALOG-1 for at se, om stationsbesætninger, videnskabsmænd på jorden og ny teknologi kan arbejde sammen om at guide en rover på en simuleret månemission.
Dette projekt undersøger, hvor effektivt en astronaut på den internationale rumstation kan betjene en rover på et månelignende terræn på Jorden. Roveren har til opgave at indsamle sten- og jordprøver, derefter fjernundersøge prøverne.
"Dette er et potentielt videnskabeligt scenarie under fremtidige missioner til Månen og Mars, " sagde William Carey, ESA-forsker og hovedefterforsker for ANALOG-1-eksperimentet. "Rummet er et så barskt sted for mennesker og maskiner. Fremtidig udforskning af solsystemet kan involvere at sende robotudforskere for at teste vandet på ukendte planeter, før de sender mennesker."
Fjerntæt
ANALOG-1 er det sidste trin i ESA's igangværende METERON (Multi-purpose End To End Robotics Operations Network) projekt, som er et initiativ til at udvikle og teste robotteknologi, kommunikations- og operationsinnovationer, som astronauter kunne bruge til at udforske solsystemet.
Historisk set, rovere, der udforsker andre planeter, er blevet styret med forprogrammeret software og af videnskabsmænd, der sender kommandoer fra Jorden, som tager lang tid at nå robotterne. Disse tilgange fungerede godt nok til i høj grad at fremme vores viden om andre verdener, men de kan gøre det svært at arbejde hurtigt, ændre planer eller hurtigt tilpasse sig uventede situationer.
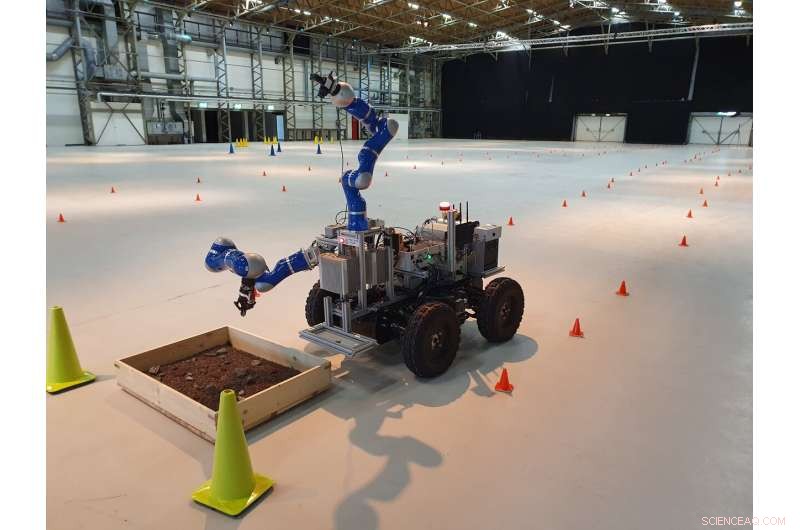
ANALOG-1 Interact-roveren placeret nær European Space Research and Technology Center i Holland styres af en surrogatastronaut baseret på European Astronaut Center i Tyskland. Keglerne markerer en rute, som roveren skal følge for at komme til prøvestedet. Kredit:ESA
Carey og hans ESA-hold formoder, at en bedre metode kan være at placere astronauter i kredsløb omkring udforskningssteder, hvor de hurtigt kan kommunikere med roveren. Med en nærliggende astronaut ved roverens kontrolelementer, videnskabsmænd kunne mere effektivt udforske et planlagt mål, drage fordel af en overraskelsesmulighed eller hurtigt klare et problem.
"En række rumorganisationer har set på et sådant scenarie for udforskningen af planetariske legemer - især for Mars, " sagde Carey. "Tilgangen kunne i høj grad øge det videnskabelige udbytte af disse missioner, samt tilbyde en måde at undgå potentiel forurening fra mennesker, der lander på overfladen, før vi kan besvare spørgsmål om eksisterende eller tidligere liv på Mars."
Resultaterne af eksperimentet kan være af særlig værdi for NASA, da det forbereder sig på at udforske Månen fra det planlagte Gateway-rumskib som en del af Artemis-programmet, hvor NASA skal frem til Månen og videre til Mars.
Inden for arms rækkevidde
I løbet af det to timer lange forsøg, ESA-astronaut Luca Parmitano vil bruge en arbejdsstation ombord på det kredsende laboratorium til at forsøge at kommandere en fjernstyrbar rover og dens arm, mens den krydser en månelignende overflade nær Noordwijk, en by i Holland. Parmitano vil køre robotten ved hjælp af et specialiseret computersystem og vil blive guidet af videnskabsmænd, der kommunikerer med ham på jorden. Han vil også bruge et avanceret Sigma 7 "joystick", der vil give astronauten mulighed for at fornemme, hvad roverens arm møder.
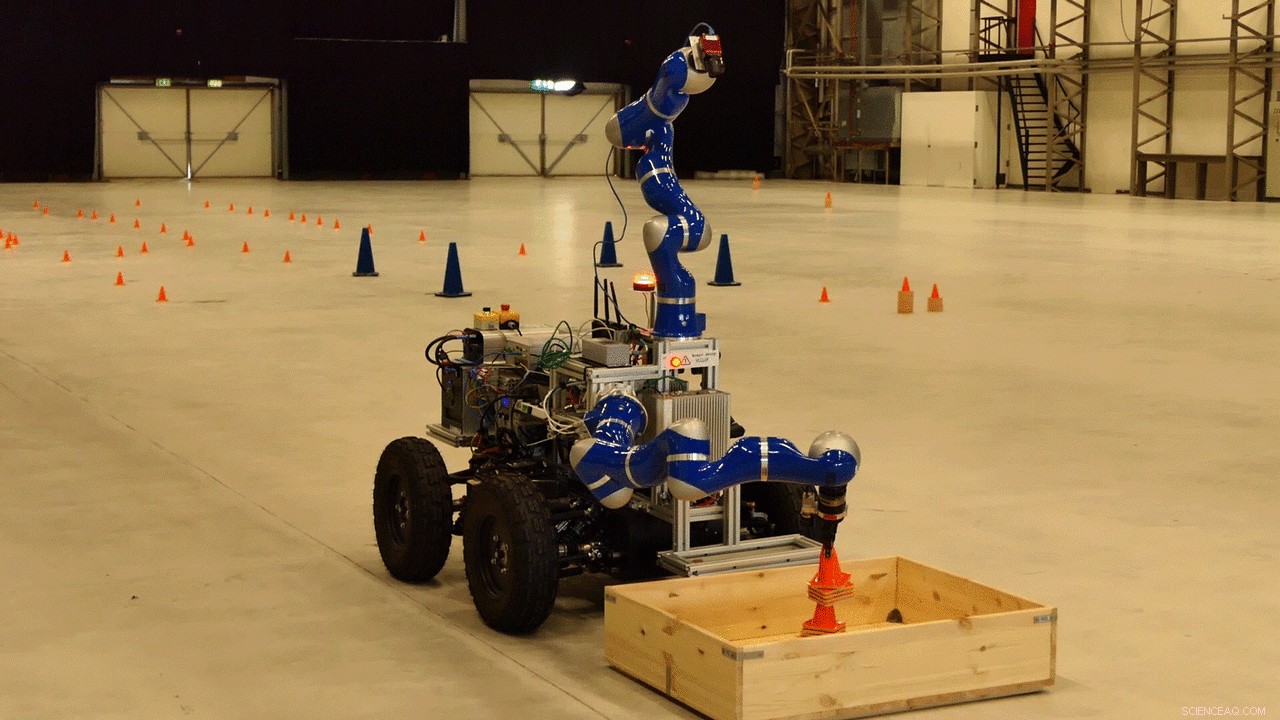
Roveren, der vil blive brugt som en del af ESA ANALOG-1-eksperimentet, flytter kegler inde i prøveboksen, som vil indeholde sten under eksperimentet. Kreditering:ESA
"Kraftfeedbacken gør det muligt for operatøren at føle, hvad robotten føler, " sagde ESA's robotingeniør Thomas Krueger. "F.eks. hvis robotten rører en skrøbelig genstand, den måler og sender information tilbage til brugeren, som så mærker sin sarthed på Sigma 7 joysticket. De kan så betjene armen mere forsigtigt end med et normalt joystick."
Parmitano vil bruge joysticket til at styre robottens arm for at tage prøver af sten og jord tilbage på Jorden. Forskere forventer, at han kan få yderligere vanskeligheder på grund af, hvordan den menneskelige krop reagerer på rummet. Forskning har vist, at mikrotyngdekraft kan forringe en astronauts føle- eller følesans, samt evnen til at spore objekter i bevægelse - som begge er kritiske i denne undersøgelses opgave.
Evaluering af den aktuelle opgave
Når eksperimentet er færdigt, forskere på jorden vil evaluere, hvor godt robotkontrolsystemerne fungerede og undersøge Parmitanos evne til at betjene roveren under påvirkning af mikrotyngdekraften. De vil også observere, hvor godt Parmitano og videnskabsholdet tilbage på Jorden var i stand til at kommunikere for at træffe beslutninger og planer for at kontrollere roveren.
"Robotter har evnen til at udvide vores tilstedeværelse på andre verdener og øge vores udforskningseffektivitet, " sagde ESA's projektleder Kjetil Wormnes. "Resultaterne af ANALOG-1 vil hjælpe os med at bestemme den mest effektive måde at samarbejde med robotter på for at forberede vores fremtidige udforskning af Månen."
 Varme artikler
Varme artikler
-
 Interstellar komet 2I/Borisov svinger forbi solenKometen 2I/Borisov er kun det andet interstellare objekt, der vides at have passeret gennem solsystemet. Disse to billeder, taget af NASAs Hubble-rumteleskop, fange kometen, der dukker op nær en baggr
Interstellar komet 2I/Borisov svinger forbi solenKometen 2I/Borisov er kun det andet interstellare objekt, der vides at have passeret gennem solsystemet. Disse to billeder, taget af NASAs Hubble-rumteleskop, fange kometen, der dukker op nær en baggr -
 Swifts teleskop afslører fødsler, dødsfald og sammenstød af stjerner gennem 1 million snapshots …Teknikere forbereder Swifts UVOT til vibrationstest den 1. august, 2002, mere end to år før lanceringen, i High Bay Clean Room på NASAs Goddard Space Flight Center i Greenbelt, Md. Kredit:NASAs Goddar
Swifts teleskop afslører fødsler, dødsfald og sammenstød af stjerner gennem 1 million snapshots …Teknikere forbereder Swifts UVOT til vibrationstest den 1. august, 2002, mere end to år før lanceringen, i High Bay Clean Room på NASAs Goddard Space Flight Center i Greenbelt, Md. Kredit:NASAs Goddar -
 En solbluss registreret fra Spanien i 1886Tegning af Valderrama af den solopblussning, han observerede den 10. september 1886 på en solplet (med penumbraen vist med stribede linjer og umbra i sort). Det viser den haletudseformede flare. Det o
En solbluss registreret fra Spanien i 1886Tegning af Valderrama af den solopblussning, han observerede den 10. september 1886 på en solplet (med penumbraen vist med stribede linjer og umbra i sort). Det viser den haletudseformede flare. Det o -
 Mystisk interstellar besøgende var sandsynligvis et mørkt brint-isbjerg, ikke udlændingeEn illustration af Oumuamua, det første objekt, vi nogensinde har set passere gennem vores eget solsystem, der har interstellar oprindelse. Kredit:European Southern Observatory/M. Kornmesser Udlæn
Mystisk interstellar besøgende var sandsynligvis et mørkt brint-isbjerg, ikke udlændingeEn illustration af Oumuamua, det første objekt, vi nogensinde har set passere gennem vores eget solsystem, der har interstellar oprindelse. Kredit:European Southern Observatory/M. Kornmesser Udlæn
- Ny læsning af Mesha Stele kan få vidtrækkende konsekvenser for bibelhistorien
- Korrelerede fejl i kvantecomputere understreger behovet for designændringer
- Undersøgelse tyder på den tidligste brug af knogleværktøj til at producere tøj i Marokko 120, 0…
- Undersøgelse kvantificerer, hvordan cykloner bidrager til globale klimasystemer
- Dyr foruden mennesker, der passer til nydelse
- Ny undersøgelse afslører beviser for, hvordan neolitiske mennesker tilpassede sig klimaændringer