


Den første succesrige hjernestyrede robotarm nogensinde uden hjerneimplantater
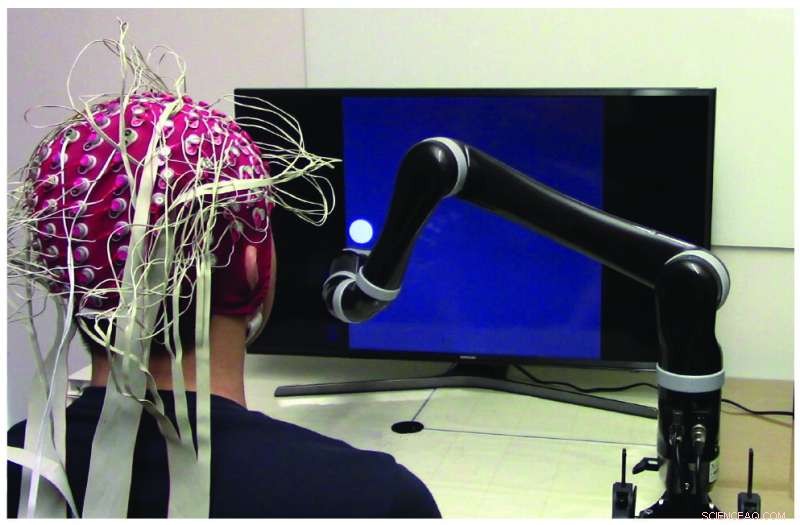
BCI-opsætning ved hjælp af en robotarm. Brugere kontrollerede den kontinuerlige 2D-bevægelse af en robotarm for at spore et tilfældigt bevægende mål på en computerskærm. Kredit:Edelman et al., Sci. Robot. 4, eaaw6844 (2019)
Et team af forskere fra Carnegie Mellon University, i samarbejde med University of Minnesota, har lavet et gennembrud inden for ikke-invasiv robotkontrol. Ved hjælp af en ikke-invasiv hjerne-computer interface (BCI), forskere har udviklet den første succesrige hjernestyrede robotarm nogensinde, der viser evnen til kontinuerligt at spore og følge en computermarkør.
At være i stand til non-invasivt at kontrollere robot-enheder ved kun at bruge tanker vil have brede anvendelser, i særdeleshed gavner livet for lammede patienter og dem med bevægelsesforstyrrelser.
BCI'er har vist sig at opnå god ydeevne til styring af robot-enheder ved kun at bruge signaler, der registreres fra hjerneimplantater. Når robotudstyr kan styres med høj præcision, de kan bruges til at udføre en række daglige opgaver. Indtil nu, imidlertid, BCI'er, der har succes med at kontrollere robotarme, har brugt invasive hjerneimplantater. Disse implantater kræver en betydelig mængde medicinsk og kirurgisk ekspertise til korrekt installation og drift, for ikke at nævne omkostninger og potentielle risici for emner, og som sådan, deres anvendelse har været begrænset til blot nogle få kliniske tilfælde.
En stor udfordring i BCI-forskningen er at udvikle mindre invasiv eller endda totalt ikke-invasiv teknologi, der ville gøre det muligt for lammede patienter at kontrollere deres miljø eller robotlemmer ved hjælp af deres egne "tanker." Sådan ikke-invasiv BCI-teknologi, hvis det lykkes, ville bringe så meget tiltrængt teknologi til adskillige patienter og endda potentielt til den brede befolkning.
Imidlertid, BCI'er, der bruger ikke-invasiv ekstern sensing, i stedet for hjerneimplantater, modtage "beskidte" signaler, fører til aktuel lavere opløsning og mindre præcis kontrol. Dermed, når man kun bruger hjernen til at styre en robotarm, en ikke-invasiv BCI tåler ikke at bruge implanterede enheder. På trods af dette, BCI-forskere er gået videre, deres øje på prisen for en mindre eller ikke-invasiv teknologi, der kan hjælpe patienter overalt på daglig basis.
Bin He, Trustee professor og afdelingsleder for biomedicinsk teknik ved Carnegie Mellon University, når det mål, én nøgleopdagelse ad gangen.
"Der er sket store fremskridt inden for hjernestyrede robotanordninger, der bruger hjerneimplantater. Det er fremragende videnskab, " siger han. "Men ikke-invasiv er det ultimative mål. Fremskridt inden for neural afkodning og den praktiske anvendelighed af ikke-invasiv robotarmkontrol vil have store konsekvenser for den eventuelle udvikling af ikke-invasiv neurorobotik."
Brug af nye sansnings- og maskinlæringsteknikker, Han og hans laboratorium har været i stand til at få adgang til signaler dybt inde i hjernen, opnå en høj opløsning af kontrol over en robotarm. Med ikke-invasiv neuroimaging og et nyt paradigme for kontinuerlig forfølgelse, Han overvinder de støjende EEG-signaler, der fører til en markant forbedring af EEG-baseret neural afkodning, og facilitering af kontinuerlig 2D-robotkontrol i realtid.
Brug af en ikke-invasiv BCI til at styre en robotarm, der sporer en markør på en computerskærm, for første gang nogensinde, Han har vist i menneskelige emner, at en robotarm nu kan følge markøren kontinuerligt. Mens robotarme styret af mennesker ikke-invasivt tidligere havde fulgt en bevægende markør i rykvis, diskrete bevægelser - som om robotarmen forsøgte at "indhente" hjernens kommandoer - nu, armen følger markøren i en jævn, kontinuerlig vej.
I et blad udgivet i Videnskab robotik , holdet etablerede en ny ramme, der adresserer og forbedrer "hjerne" og "computer" komponenterne i BCI ved at øge brugerengagement og træning, samt rumlig opløsning af ikke-invasive neurale data gennem EEG-kildebilleddannelse.
Papiret, "Non-invasiv neuroimaging forbedrer kontinuerlig neural sporing til kontrol af robotter, " viser, at holdets unikke tilgang til at løse dette problem ikke forbedrede BCI-læring med næsten 60% for traditionelle center-out-opgaver, det forbedrede også kontinuerlig sporing af en computermarkør med over 500 %.
Teknologien har også applikationer, der kan hjælpe en række mennesker, ved at tilbyde sikker, ikke-invasiv "mind control" af enheder, der kan give folk mulighed for at interagere med og kontrollere deres omgivelser. Teknologien har, til dato, blevet testet i 68 raske mennesker (op til 10 sessioner for hvert emne), inklusive virtuel enhedskontrol og styring af en robotarm til kontinuerlig forfølgelse. Teknologien er direkte anvendelig til patienter, og holdet planlægger at udføre kliniske forsøg i den nærmeste fremtid.
"På trods af tekniske udfordringer ved at bruge ikke-invasive signaler, vi er fuldt ud forpligtet til at bringe denne sikre og økonomiske teknologi til folk, der kan drage fordel af den, " siger han. "Dette arbejde repræsenterer et vigtigt skridt i ikke-invasive hjerne-computer grænseflader, en teknologi, som en dag kan blive en gennemgående hjælpeteknologi, der hjælper alle, som smartphones."
 Varme artikler
Varme artikler
-
 Undersøgelse undersøger mangel på ansvarsfraskrivelser på Facebook og Googles politiske annoncerKatherine Haenschen underviser i kurser i politisk kommunikation og sociale medier på Virginia Tech. Kredit:Jason Jones En kappe af mystik indhyller ofte de teknologiske giganters indre virke, men
Undersøgelse undersøger mangel på ansvarsfraskrivelser på Facebook og Googles politiske annoncerKatherine Haenschen underviser i kurser i politisk kommunikation og sociale medier på Virginia Tech. Kredit:Jason Jones En kappe af mystik indhyller ofte de teknologiske giganters indre virke, men -
 Online dating bliver mainstream trods nogle tvivl:amerikansk undersøgelseAmerikanerne varmer op til online-apps og datingtjenester, ifølge en nylig undersøgelse Amerikanernes brug af online-apps og dating-websteder til at møde potentielle partnere vokser, selvom mange
Online dating bliver mainstream trods nogle tvivl:amerikansk undersøgelseAmerikanerne varmer op til online-apps og datingtjenester, ifølge en nylig undersøgelse Amerikanernes brug af online-apps og dating-websteder til at møde potentielle partnere vokser, selvom mange -
 Mød Lindsey:Shell vær din guide i dagLindsey the Robot på The Collection Museum i Lincoln, Storbritannien. Kredit:University of Lincoln En 5 fod 2 tommer høj magenta robot, udstyret med sensorer og kameraer, vil guide besøgende genne
Mød Lindsey:Shell vær din guide i dagLindsey the Robot på The Collection Museum i Lincoln, Storbritannien. Kredit:University of Lincoln En 5 fod 2 tommer høj magenta robot, udstyret med sensorer og kameraer, vil guide besøgende genne -
 Eksperter:Amerikansk anti-Huawei-kampagne sandsynligvis overdrevetI denne 24. januar, 2019, fil foto Richard Yu, CEO for Huawei Consumer Business Group, løfter sløret for 5G-modemet Balong 5000-chipsættet i Beijing. Sikkerhedseksperter siger, at den amerikanske rege
Eksperter:Amerikansk anti-Huawei-kampagne sandsynligvis overdrevetI denne 24. januar, 2019, fil foto Richard Yu, CEO for Huawei Consumer Business Group, løfter sløret for 5G-modemet Balong 5000-chipsættet i Beijing. Sikkerhedseksperter siger, at den amerikanske rege