


NASAs Mars rover-chauffører har brug for din hjælp
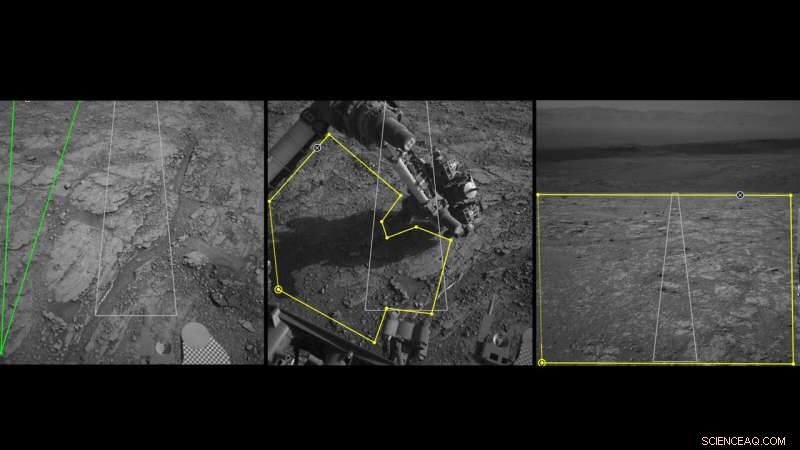
Tre billeder fra værktøjet kaldet AI4Mars viser forskellige slags Mars-terræn set af NASAs Curiosity-rover. Ved at tegne grænser omkring terrænegenskaber og tildele dem en af fire etiketter, du kan hjælpe med at træne en algoritme, der automatisk identificerer terræntyper for Curiositys roverplanlæggere. Kredit:NASA/JPL-Caltech
Du kan muligvis hjælpe NASAs Curiosity-rover-chauffører med at navigere på Mars bedre. Brug af onlineværktøjet AI4Mars til at mærke terrænegenskaber i billeder downloadet fra den røde planet, du kan træne en kunstig intelligens-algoritme til automatisk at læse landskabet.
Er det en stor sten til venstre? Kan det være sand? Eller måske er det rart, fladt grundfjeld. AI4Mars, som er hostet på borgervidenskabens hjemmeside Zooniverse, lader dig tegne grænser omkring terræn og vælge en af fire etiketter. Disse etiketter er nøglen til at skærpe Mars terrænklassificeringsalgoritmen kaldet SPOC (Soil Property and Object Classification).
Udviklet på NASA's Jet Propulsion Laboratory, som har styret alle agenturets Mars rover missioner, SPOC mærker forskellige terræntyper, skabe et visuelt kort, der hjælper missionsteammedlemmer med at bestemme, hvilke veje de skal tage. SPOC er allerede i brug, men systemet kunne bruge yderligere uddannelse.
"Typisk, hundredtusindvis af eksempler er nødvendige for at træne en dyb læringsalgoritme, " sagde Hiro Ono, en AI-forsker ved JPL. "Algorithmer til selvkørende biler, for eksempel, er trænet med adskillige billeder af veje, tegn, trafiklys, fodgængere og andre køretøjer. Andre offentlige datasæt til dyb læring indeholder mennesker, dyr og bygninger - men ingen Mars-landskaber."
Når du er helt oppe i fart, SPOC vil automatisk kunne skelne mellem sammenhængende jord, høje sten, fladt grundfjeld og farlige klitter, at sende billeder til Jorden, der vil gøre det nemmere at planlægge Curiositys næste træk.
"I fremtiden, vi håber, at denne algoritme kan blive nøjagtig nok til at udføre andre nyttige opgaver, som at forudsige, hvor sandsynligt det er, at en rovers hjul glider på forskellige overflader, " sagde Ono.
Rover Planners job
JPL-ingeniører kaldet roverplanlæggere kan drage størst fordel af en bedre uddannet SPOC. De er ansvarlige for hver eneste bevægelse fra Curiosity, om det er at tage en selfie, rislende pulveriserede prøver ind i roverens krop for at blive analyseret eller køre fra det ene sted til det næste.
Det kan tage fire til fem timer at træne en køretur (hvilket nu gøres virtuelt), kræver, at flere personer skriver og gennemgår hundredvis af linjer kode. Opgaven involverer også et omfattende samarbejde med forskere:Geologer vurderer terrænet for at forudsige, om Curiositys hjul kunne glide, blive beskadiget af skarpe sten eller sidde fast i sand, som fangede både Spirit- og Opportunity-roverne.
Planlæggere overvejer også, hvilken vej roveren vil pege i slutningen af en køretur, da dens højforstærkningsantenne har brug for en fri sigtelinje til Jorden for at modtage kommandoer. Og de forsøger at forudse, at skygger falder hen over terrænet under en køretur, som kan forstyrre, hvordan Nysgerrighed bestemmer afstand. (Roveren bruger en teknik kaldet visuel odometri, sammenligne kamerabilleder med nærliggende vartegn.)
Hvordan AI kunne hjælpe
SPOC vil ikke erstatte det komplicerede, tidskrævende arbejde af roverplanlæggere. Men det kan frigøre dem til at fokusere på andre aspekter af deres job, som at diskutere med videnskabsmænd, hvilke sten der skal studeres næste gang.
"Det er vores opgave at finde ud af, hvordan man sikkert kan få missionens videnskab, " sagde Stephanie Oij, en af JPL rover planlæggere involveret i AI4Mars. "Automatisk generering af terrænmærker ville spare os tid og hjælpe os med at være mere produktive."
Fordelene ved en smartere algoritme vil udvides til planlæggere på NASAs næste Mars-mission, Perseverance roveren, som lanceres til sommer. Men først, et arkiv med mærkede billeder er påkrævet. Mere end 8, 000 Curiosity-billeder er blevet uploadet til AI4Mars-siden indtil videre, giver masser af foder til algoritmen. Ono håber at tilføje billeder fra Spirit and Opportunity i fremtiden. I mellemtiden, JPL-frivillige oversætter siden, så deltagere, der taler spansk, hindi, Japansk og flere andre sprog kan også bidrage.
 Varme artikler
Varme artikler
-
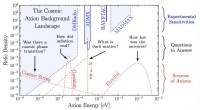 Axioner kan være fossilet af det univers, forskerne har ventet påVariationen i CaBens form som funktion af energi og tæthed kan ses for fire forskellige scenarier for dets produktion. At finde en af disse ville hjælpe med at besvare de grundlæggende spørgsmål, de
Axioner kan være fossilet af det univers, forskerne har ventet påVariationen i CaBens form som funktion af energi og tæthed kan ses for fire forskellige scenarier for dets produktion. At finde en af disse ville hjælpe med at besvare de grundlæggende spørgsmål, de -
 Jagten på at finde tegn på gammelt liv på MarsKredit:CC0 Public Domain Mars kan nu betragtes som en gold, iskold ørken, men havde Jordens nærmeste nabo engang liv? Det er et spørgsmål, der har optaget videnskabsmænd i århundreder og fyret op
Jagten på at finde tegn på gammelt liv på MarsKredit:CC0 Public Domain Mars kan nu betragtes som en gold, iskold ørken, men havde Jordens nærmeste nabo engang liv? Det er et spørgsmål, der har optaget videnskabsmænd i århundreder og fyret op -
 Transgalaktiske streamere, der fodrer den mest lysende galakse i universetALMA-billede afslører, hvordan W2246-0526 bliver fodret af tre ledsagende galakser gennem trans-galaktiske streamers af gas. Hovedgalaksen og en af dens ledsagere er i centrum. Nederst til venstre e
Transgalaktiske streamere, der fodrer den mest lysende galakse i universetALMA-billede afslører, hvordan W2246-0526 bliver fodret af tre ledsagende galakser gennem trans-galaktiske streamers af gas. Hovedgalaksen og en af dens ledsagere er i centrum. Nederst til venstre e -
 Løsning af solens superopvarmningsmysterium med Parker Solar ProbeKredit:University of Michigan Det er et af de største og længstvarende mysterier omkring, helt bogstaveligt, vores sol - hvorfor er dens ydre atmosfære varmere end dens brændende overflade? Unive
Løsning af solens superopvarmningsmysterium med Parker Solar ProbeKredit:University of Michigan Det er et af de største og længstvarende mysterier omkring, helt bogstaveligt, vores sol - hvorfor er dens ydre atmosfære varmere end dens brændende overflade? Unive
- Hvad er de 10 hovedkropssystemer?
- Belgiens eventyr blåklokke skov offer for egen skønhed
- Spor af historisk rensdyrgræsning kan stadig iagttages efter 100 år
- Den første kortlægning på landsbyniveau af barndomsunderernæring i Indien afslører lokale uligh…
- Nemme måder at vise masse vs. Tæthed for børn
- Er latter smitsom?