


Denne transformerende rover kan udforske det hårdeste terræn

DuAxel-roveren ses her deltage i felttest i Mojave-ørkenen. Den firehjulede rover er sammensat af to Axel-robotter. Den ene del forankrer sig selv på plads, mens den anden bruger en tøjring til at udforske ellers utilgængeligt terræn. Kredit:NASA/JPL-Caltech/J.D. Gammell
En rover triller over stenet terræn, dens fire metalhjul klaprer sammen, indtil de støder på en tilsyneladende uoverstigelig fare:en stejl skråning. Nedenunder er en potentiel skare af videnskabelige mål. Med en typisk rover, operatørerne skulle finde et andet mål, men dette er DuAxel, en robot bygget til præcis som denne.
Roveren er faktisk lavet af et par tohjulede rovere, hver kaldet Axel. At dele og erobre, roveren stopper, sænker sit chassis og forankrer det til jorden, før det i det væsentlige deler sig i to. Med den bagerste halvdel af DuAxel (forkortelse for "dual-Axel") solidt på plads, den forreste halvdel løsnes og ruller væk på en enkelt aksel. Det eneste, der forbinder de to halvdele nu, er en tøjring, der ruller ud, når den forreste aksel nærmer sig faren og rappeller ned ad skråningen, ved hjælp af instrumenter gemt i hjulnavet til at studere et videnskabeligt attraktivt sted, som normalt ville være uden for rækkevidde.
Dette scenarie udspillede sig sidste efterår under en felttest i Mojave-ørkenen, da et lille team af ingeniører fra NASA's Jet Propulsion Laboratory i det sydlige Californien satte den modulære rover igennem en række udfordringer for at teste alsidigheden af dens design.
"DuAxel præsterede ekstremt godt i feltet, med succes demonstrere sin evne til at nærme sig et udfordrende terræn, anker, og løsne så dens tøjrede Axel rover, " sagde Issa Nesnas, en robotteknolog hos JPL. "Axel manøvrerede derefter selvstændigt ned ad stejle og stenede skråninger, at implementere sine instrumenter uden nødvendigheden af en robotarm."
Ideen bag at skabe to enkeltakslede rovere, der kan kombineres til én med en central nyttelast, er at maksimere alsidighed:Den firehjulede konfiguration egner sig til at køre store afstande på tværs af barske landskaber; den tohjulede version byder på en smidighed, som større rovere ikke kan.
"DuAxel åbner adgang til mere ekstremt terræn på planetariske legemer som Månen, Mars, Kviksølv, og muligvis nogle iskolde verdener, som Jupiters måne Europa, " tilføjede Nesnas.
Fleksibiliteten blev bygget med kratervægge, gruber, scarps, ventilationsåbninger, og andet ekstremt terræn på disse forskellige verdener i tankerne. Det er fordi på jorden, nogle af de bedste steder at studere geologi kan findes i klippefremspring og på klippesider, hvor mange lag af fortiden er pænt blotlagt. De er svære nok at nå her, endsige på andre himmellegemer.
Roverens mobilitet og evne til at få adgang til ekstreme steder er en lokkende kombination for Laura Kerber, en planetgeolog ved JPL. "Det er derfor, jeg synes, at Axel-roveren er ret lækker, " sagde hun. "I stedet for altid at forsøge at sikre sig mod farer som at falde eller vende om, den er designet til at modstå dem."

Under samme felttest, DuAxel-roveren adskilles i to enkeltakslede robotter, så man kan rappelle ned ad en skråning, der er for stejl til konventionelle rovere. Kredit:NASA/JPL-Caltech/J.D. Gammell
En tohjulet historie
Det radikale koncept med to robotkøretøjer, der fungerer som ét, har rødder i slutningen af 1990'erne, da NASA begyndte at udforske ideer til modulære, rekonfigurerbar, selvreparerende rovere. Dette inspirerede Nesnas og hans team hos JPL til at udvikle den robuste, fleksibel tohjulet robot, der ville komme til at blive kendt som Axel.
De forestillede sig et modulært system:To aksler kunne docke til hver side af en nyttelast, for eksempel, eller tre Axels kunne docke til to nyttelaster, og så videre, skabe et "tog" af Axels, der er i stand til at transportere mange nyttelast. Dette koncept opfyldte også "selv-reparerende" kravet i NASAs udfordring:Skulle en Axel fejle, en anden kunne tage dens plads.
Axel udvikling forblev fokuseret på modulær transport indtil 2006, da satellitbilleder af Mars-overfladen afslørede kløfter i kratervægge. Senere, opdagelsen af, hvad der så ud til at være sæsonbestemt udstrømning af flydende vand - mørke træk kendt som tilbagevendende skråninger - øgede interessen for at bruge robotter til at tage prøver. Forskere ville vide, om kløfter og tilbagevendende skråninger var forårsaget af vandstrømme eller noget andet.
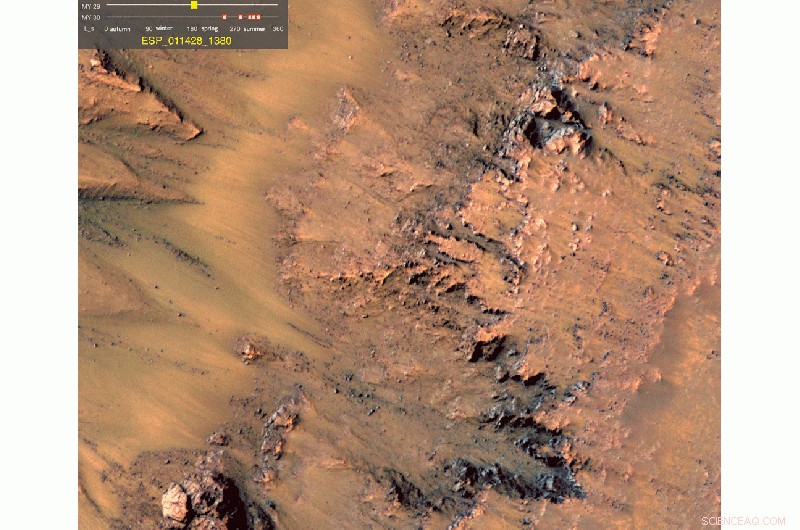
I varme årstider på Mars, mørke striber kaldet "tilbagevendende skråninger" vises ofte på kraterskråninger, som det ses i denne serie af observationer fanget af HiRISE-kameraet ombord på NASAs Mars Reconnaissance Orbiter. DuAxel-roveren er designet til at rappelle til sådanne utilgængelige områder for at studere dem. Kredit:NASA/JPL-Caltech/University of Arizona
Men skråningerne er for stejle til en konventionel rover - selv for Curiosity eller den snart landende Perseverance rover, som begge er designet til at krydse skråninger på op til 30 grader. At udforske disse funktioner direkte ville kræve en anden slags køretøj.
Så Nesnas og hans team begyndte at udvikle en version af Axel, der skulle være bundet til en lander, bruge tøjret ikke kun til at gå ned ad en kraterside eller en stejl kløftvæg, men også at levere strøm og kommunikere med landeren. Dens hjul kunne udstyres med ekstra høje ryper, eller trin, for ekstra trækkraft, mens hjulnavene kunne rumme mikroskoper, øvelser, prøveindsamlingsscoops, og anden instrumentering til at studere terrænet. At dreje, den to-hjulede aksel ville bare rotere det ene hjul hurtigere end det andet.
Interessen for konceptets fleksibilitet har ført til en spirende familie af tohjulede designs, inklusive NASA JPL's A-PUFFER og BRUIE, som udvider muligheden for udforskning til nye destinationer og applikationer, herunder under vand på iskolde verdener.
På trods af den tøjrede Axels alsidighed, der var en bemærkelsesværdig begrænsning, når den blev brugt i forbindelse med en stationær lander:Landeren skulle være inden for rappelleringsafstand fra kratersiden - hvilket kræver en grad af landingspræcision, som måske ikke er mulig for en planetarisk mission.

Den tohjulede Axel går ned af skråningen, mens den er tøjret til sin modpart forankret over skråningen. Tjoret fungerer som en slags klatrereb, mens det også giver kraft og et kommunikationsmiddel. Kredit:NASA/JPL-Caltech/J.D. Gammell
For at fjerne dette krav og øge mobiliteten, holdet vendte tilbage til det originale modulære design, tilpasset den til den nye tøjrede Axel, og kaldte den DuAxel.
"Den vigtigste fordel ved at bruge DuAxel bliver tydeliggjort, når du har usikkerhed på landingsstedet, som vi gør på Mars, eller du vil flytte til et nyt sted for at rappelle og udforske med Axel, " sagde Patrick Mcgarey, en robotteknolog hos JPL og DuAxel-teammedlem. "Det muliggør ubundet kørsel fra landingsstedet og giver mulighed for midlertidig forankring til terrænet, fordi det i bund og grund er en transformerende robot lavet til planetarisk udforskning."
Mens DuAxel fortsat er en teknologidemonstration og venter på at blive tildelt en destination, dets team vil fortsætte med at finpudse sin teknologi; Den vej, når tiden kommer, robotten ville være klar til at rulle, hvor andre rovere frygter at træde.
 Varme artikler
Varme artikler
-
 Månen er rigere på vand end engang troedeMånen blev anset for at være knogletør indtil for omkring et årti siden Der kan være langt mere vand på Månen end tidligere antaget, ifølge to undersøgelser, der blev offentliggjort i mandags, der
Månen er rigere på vand end engang troedeMånen blev anset for at være knogletør indtil for omkring et årti siden Der kan være langt mere vand på Månen end tidligere antaget, ifølge to undersøgelser, der blev offentliggjort i mandags, der -
 Fødsel af et sort hul eller neutronstjerne fanget for første gangEt kig på The Cow (ca. 80 dage efter eksplosion) fra W.M. Keck Observatory i Maunakea, Hawaii. Koen er beliggende i CGCG 137-068 galaksen, 200 millioner lysår fra Jorden. Kredit:Raffaella Margutti/Nor
Fødsel af et sort hul eller neutronstjerne fanget for første gangEt kig på The Cow (ca. 80 dage efter eksplosion) fra W.M. Keck Observatory i Maunakea, Hawaii. Koen er beliggende i CGCG 137-068 galaksen, 200 millioner lysår fra Jorden. Kredit:Raffaella Margutti/Nor -
 Velegnet til MarsExoFiT rover i Chile. Kredit:Airbus Rovers er alsidige opdagelsesrejsende på overfladen af andre planeter, men de har brug for noget træning, før de tager afsted. En model af Rosalind Franklin r
Velegnet til MarsExoFiT rover i Chile. Kredit:Airbus Rovers er alsidige opdagelsesrejsende på overfladen af andre planeter, men de har brug for noget træning, før de tager afsted. En model af Rosalind Franklin r -
 King Tut fundet at have en meteorisk dolkKing Tut fundet at have en meteorisk dolk HowStuffWorks Ahhh, Kong Tutankhamun, uden tvivl den mest kendte for os af det gamle Egyptens herskere, inspirationen til mange barns arkæologiske dagdrømme
King Tut fundet at have en meteorisk dolkKing Tut fundet at have en meteorisk dolk HowStuffWorks Ahhh, Kong Tutankhamun, uden tvivl den mest kendte for os af det gamle Egyptens herskere, inspirationen til mange barns arkæologiske dagdrømme
- Undersøgelse viser, at en detektor ikke passer alle til røg i rumfartøjer
- Reduktioner af fosfor i søer i Kina på grund af regeringens indsats
- Opbygning af en trådløs mikromaskine
- Fossile rekordanalyse antyder evolutionær oprindelse af insekters strukturelle farver
- Undersøgelse finder sammenhænge mellem skovrydning og fiskeriudbytter i Amazonas
- 10 skatte taber godt, når havniveauet stiger