


Vanskeligt terræn:Hjælper med at sikre en sikker roverlanding

Mars 2020's Perseverance rover er udstyret med et lander vision system baseret på terræn-relativ navigation, en avanceret metode til autonomt at sammenligne realtidsbilleder med forudindlæste kort, der bestemmer roverens position i forhold til farer i landingsområdet. Omdirigeringsvejledningsalgoritmer og software kan så dirigere roveren rundt om disse forhindringer, hvis det er nødvendigt. Kredit:NASA/JPL-Caltech
Efter en næsten syv måneder lang rejse til Mars, NASA's Perseverance rover er beregnet til at lande ved Den Røde Planets Jezero Crater 18. februar, 2021, en barsk flade, der er valgt for sin videnskabelige forskning og muligheder for indsamling af prøver.
Men netop de funktioner, der gør stedet fascinerende for videnskabsmænd, gør det også til et relativt farligt sted at lande - en udfordring, der har motiveret til strenge test her på Jorden for lander vision system (LVS), som roveren vil regne med for sikkert at lande.
"Jezero er 28 miles bred, men inden for det område er der en masse potentielle farer, som roveren kan støde på:bakker, klippemarker, klitter, selve kraterets vægge, for blot at nævne nogle få, " sagde Andrew Johnson, ledende robotsystemingeniør ved NASAs Jet Propulsion Laboratory i det sydlige Californien. "Så, hvis du lander på en af disse farer, det kan være katastrofalt for hele missionen."
Gå ind i terræn-relativ navigation (TRN), den missionskritiske teknologi i hjertet af LVS, der fanger billeder af Mars-terrænet i realtid og sammenligner dem med indbyggede kort over landingsområdet, autonomt dirigere roveren til at omdirigere uden om kendte farer og forhindringer efter behov.
"Til Mars 2020, LVS vil bruge positionsoplysningerne til at finde ud af, hvor roveren er i forhold til sikre steder mellem disse farer. Og på et af de sikre steder er det, hvor roveren vil lande, " forklarede Johnson.
Hvis Johnson lyder overbevist om, at LVS vil arbejde for at lande Perseverance sikkert, det er fordi det tillader roveren at bestemme sin position i forhold til jorden med en nøjagtighed på omkring 200 fod eller mindre. At lav fejlmargin og høj grad af sikkerhed er ved design, og resultatet af omfattende test både i laboratoriet og i marken.
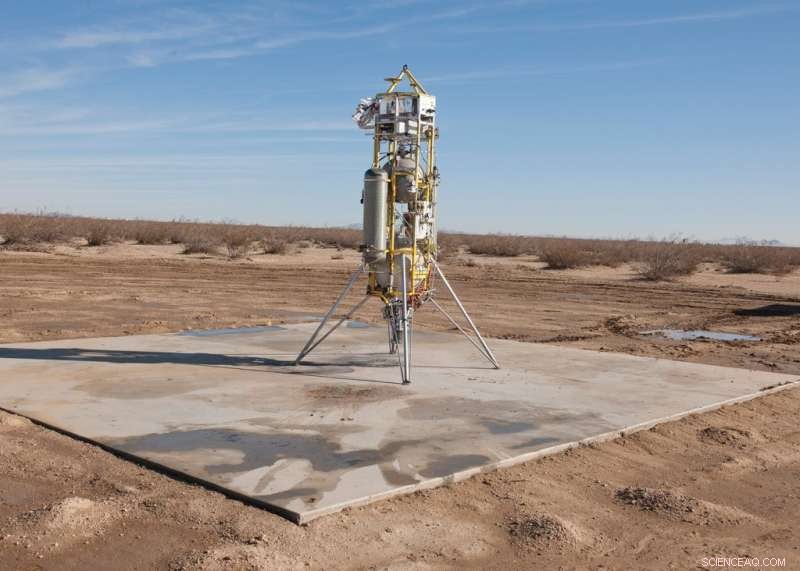
Mastens Xombie VTVL-system sidder på en affyringsrampe i Mojave, Californien i december 2014, forberedt til en flyvetest, der ville hjælpe med at bevise lander vision-systemets evner til Mars 2020 Perseverance rover-missionen. Kredit:Masten Space Systems
"Vi har, hvad vi kalder trifecta af test, " forklarede JPL's Swati Mohan, vejledning, navigation, og kontroloperationer fører til Mars 2020.
Mohan sagde, at de første to testområder - hardware og simulering - blev udført i et laboratorium.
"Det er der, vi tester enhver tilstand og variabel, vi kan. Vakuum, vibrationer, temperatur, elektrisk kompatibilitet - vi sætter hardwaren igennem dens trin, " sagde Mohan. "Så med simulering, vi modellerer forskellige scenarier, som softwarealgoritmerne kan støde på på Mars - en for solrig dag, meget mørk dag, blæsende dag – og vi sørger for, at systemet opfører sig som forventet uanset disse forhold."
Men det tredje stykke af trifectaen - felttestene - kræver faktiske flyvninger for at sætte laboratorieresultaterne igennem yderligere stringens og give et højt niveau af teknisk beredskab til NASA-missioner. Til LVS's tidlige flyvetest, Johnson og teamet monterede LVS til en helikopter og brugte den til automatisk at estimere køretøjets position, mens den fløj.
"Det fik os til et vist niveau af teknisk beredskab, fordi systemet kunne overvåge en bred vifte af terræn, men det havde ikke den samme slags afstamning, som Perseverance vil have, " sagde Johnson. "Der var også et behov for at demonstrere LVS på en raket."
Dette behov blev opfyldt af NASA's Flight Opportunities-program, som lettede to 2014-flyvninger i Mojave-ørkenen på Masten Space Systems' Xombie - et vertikalt start- og vertikallandingssystem (VTVL), der fungerer på samme måde som en lander. Flyvetestene demonstrerede LVS's evne til at dirigere Xombie til autonomt at ændre kurs og undgå farer ved nedstigning ved at vedtage en nyligt beregnet vej til et sikkert landingssted. Tidligere flyvninger på Mastens VTVL-system hjalp også med at validere algoritmer og software, der blev brugt til at beregne brændstofoptimale baner for planetariske landinger.
"Test på raketten lagde stort set al tilbageværende tvivl til ro og besvarede et kritisk spørgsmål for LVS-operationen bekræftende, " sagde JPLs Nikolas Trawny, en ingeniør for nyttelast og pegekontrolsystemer, der arbejdede tæt sammen med Masten på felttestene i 2014. "Det var dengang, vi vidste, at LVS ville fungere under den højhastigheds lodrette nedstigning, der er typisk for Mars-landinger."
Johnson tilføjede, at den suborbitale test faktisk øgede teknologiberedskabsniveauet for at få det endelige grønne lys for accept i Mars 2020-missionen.
"Den test, som Flight Opportunities er sat op til at levere, var virkelig uden fortilfælde inden for NASA på det tidspunkt, " sagde Johnson. "Men det har vist sig at være så værdifuldt, at det nu er ved at blive forventet at udføre disse typer flyvetests. For LVS, disse raketflyvninger var hjørnestenen i vores teknologiudviklingsindsats."
Med teknologien accepteret til Mars 2020, Missionsholdet begyndte at bygge den endelige version af LVS, der ville flyve på Perseverance. I 2019, en kopi af det system fløj på endnu en helikopterdemonstration i Death Valley, Californien, faciliteret af NASA's Technology Demonstration Missions-program. Helikopterflyvningen gav en sidste kontrol af over seks år med flere felttest.
Men Mohan påpegede, at selv med disse vellykkede demonstrationer, der vil være mere arbejde at gøre for at sikre en sikker landing. Hun vil være ved Mission Control til landingen, overvågning af systemets sundhed hvert trin af vejen.
"Det virkelige liv kan altid kaste dig med kurvebolde. Så, vi vil overvåge alt under krydstogtfasen, kontrollere strømmen til kameraet, at sikre, at data flyder som forventet, " sagde Mohan. "Og når vi først får det signal fra roveren, der siger:'Jeg er landet, og jeg er på stabil grund, så kan vi fejre det.
 Varme artikler
Varme artikler
-
 Brug af Jordens historie til at informere om søgen efter liv på exoplaneterEn jordlignende exomoon, der kredser om en gasgigantisk planet i en stjernes beboelige zone. Kredit:NASA/JPL-Caltech UC Riverside leder et af NASA Astrobiology Programs otte nye forskerhold, der t
Brug af Jordens historie til at informere om søgen efter liv på exoplaneterEn jordlignende exomoon, der kredser om en gasgigantisk planet i en stjernes beboelige zone. Kredit:NASA/JPL-Caltech UC Riverside leder et af NASA Astrobiology Programs otte nye forskerhold, der t -
 Rumvandrende astronauter giver ny hånd til robotarmenNASA-astronauterne Mark Vande Hei, venstre, og Scott Tingle arbejder uden for den internationale rumstation tirsdag, 23. januar, 2018, at give robotarmen en ny hånd. (NASA TV via AP) Rumvandrende
Rumvandrende astronauter giver ny hånd til robotarmenNASA-astronauterne Mark Vande Hei, venstre, og Scott Tingle arbejder uden for den internationale rumstation tirsdag, 23. januar, 2018, at give robotarmen en ny hånd. (NASA TV via AP) Rumvandrende -
 Billede:Hubble opdager en galakse med en ejendommelig armKredit:ESA/Hubble &NASA, A. Riess et al. Dette billede taget med NASA/ESA Hubble-rumteleskopet viser NGC 7678 - en galakse med en særlig fremtrædende arm, beliggende cirka 164 millioner lysår væk
Billede:Hubble opdager en galakse med en ejendommelig armKredit:ESA/Hubble &NASA, A. Riess et al. Dette billede taget med NASA/ESA Hubble-rumteleskopet viser NGC 7678 - en galakse med en særlig fremtrædende arm, beliggende cirka 164 millioner lysår væk -
 SpaceX opsender heftig raket med 24 satellitter, eksperimenterEn SpaceX Falcon tung raket løfter sig fra pad 39A ved Kennedy Space Center i Cape Canaveral, Fla., tidlig tirsdag, 25. juni, 2019. Falcon-raketten har en nyttelast af militære og videnskabelige forsk
SpaceX opsender heftig raket med 24 satellitter, eksperimenterEn SpaceX Falcon tung raket løfter sig fra pad 39A ved Kennedy Space Center i Cape Canaveral, Fla., tidlig tirsdag, 25. juni, 2019. Falcon-raketten har en nyttelast af militære og videnskabelige forsk
- Sådan Graph Polar Equations
- Da Vega mødte satellitter
- Blandede faseskyer bremser den globale opvarmning, men kun op til et bestemt punkt
- Gammelt grundvand i Australien, der bidrager med kulstof til fødevæv gennem overfladevand
- Sådan beregnes volumen ved STP
- On-demand-tjenester bringer offentlig transport til forstæderne