


Droner kunne hjælpe med at kortlægge månens overflade med ekstrem præcision
Udforskning af månen er blevet mere og mere et omdrejningspunkt på det seneste, især med en række landere, der for nylig blev opsendt med forskellige grader af succes. En af de vanskeligheder, som landere og eventuelle fremtidige menneskelige missioner står over for, er at forstå det terræn, de lander på og potentielt krydser i tilfælde af en rover eller et menneske. For at hjælpe med at bekæmpe dette problem har et team af forskere fra Schweiz udviklet et dronekoncept, der kan hjælpe med at kortlægge nogle af de mere interessante, potentielt farlige områder at udforske på månen.
Kortlægning af månen har allerede været en prioritet i årevis. Nogle af de mere spændende regioner, såsom Permanently Shadows Regions (PSR) ved månepolerne, der rummer en betydelig mængde vandis, er dog kun blevet kortlagt til en opløsning på omkring 1m pr. pixel i de bedste billeder af dem. Det inkluderer kunstig forbedring af AI-understøttede algoritmer.
Det opløsningsniveau er ikke nær nok til at give nyttige planlægningsdata for enhver potentiel rover eller menneskelige missioner - et givet roverhjul i sig selv vil ikke engang mere end i bredden, endsige håbe på at krydse en forhindring af den størrelse. Derfor skal alle rovere, vi sender, styres manuelt eller komme meget langsomt og selvstændigt. I betragtning af den begrænsede operationelle tidslinje for disse forventede rover-missioner, kan det langsomme tempo begrænse deres evne til at søge efter de værdifulde ressourcer og websteder, som videnskabsmænd mener, gemmer sig i PSR'erne.
Den åbenlyse løsning på dette problem er at få en anden form for robot til at fungere som spejder, svarende til hvad Ingenuity havde gjort for Perseverance-roveren på Mars indtil for nylig. Det samarbejde havde gjort det muligt for Perseverance at sætte rekorden for længste endags autonom kørsel på en anden planet - i alt omkring 700 m. Hvis en spejder var i stand til at kortlægge detaljer om månens overflade foran en potentiel rover, kunne den bevæge sig endnu hurtigere end det tempo, der blev sat af Perseverance.
Til dette formål har der været masser af planlagte missioner for at gøre netop det. I et nyligt papir offentliggjort i Acta Astronautica Romeo Tonasso og hans kolleger ved Ecole Polytechnique Federale de Lausanne beskrev deres idé og opdelte disse eksisterende missionskoncepter i to kategorier – store og små.
Større systemer kan indeholde afprøvede kemiske fremdriftssystemer, der, når de flyvetestes, kan være omfangsrige og bruge potentielt farlige kemikalier. Mindre systemer kunne bruge forskellige former for kemisk fremdrift, såsom H2 O2 raketter, eller endnu mere banale midler til bevægelse, såsom ved bogstaveligt talt at hoppe fra jorden ved hjælp af ben. Mange af teknologierne til den type fremdrift er dog endnu ikke på et højt nok udviklingsniveau til at blive brugt i en praktisk mission.
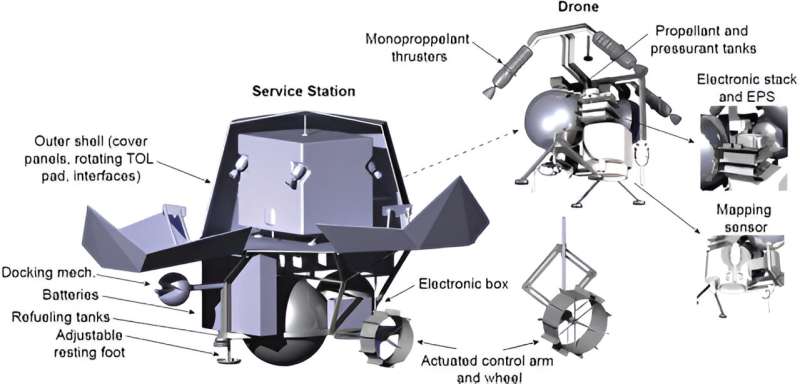
At finde en mellemvej mellem den ældre, tungere tragtmodel og den nyere, utestede var en af de førende designmæssige begrænsninger for det nye koncept. Løsningen, de fandt på, var en raketdrevet drone, der ville blive opsendt fra og vende tilbage til en basestation, der kunne bugseres af en rover eller et andet måneudforskningsfartøj.
Basestationen ville tanke dronen op efter hver flyvning, så den kunne foretage flere flyvninger uden at bære overskydende drivmiddelvægt. Med denne opsætning kunne systemet kortlægge så mange som 9 kvadratkilometer af månens overflade med en opløsning, der ville være nyttig for både rover- og menneskelig missionsplanlægning. Ved afslutningen af denne indsats skulle basestationen tankes op, så den kan fortsætte sin mission, som er en central del af designkonceptet.
Denne idé har andre fordele - mange andre hoppere skal lande på jorden, og deres fremdriftssystem kan introducere en betydelig mængde kaos i månemiljøet. Det er især uønsket, hvis overfladen, de lander på, tilfældigvis indeholder kommercielt levedygtige materialer såsom vandis. Landing tilbage ved en mobil dockingstation eliminerer også ethvert støvopstød, som i væsentlig grad kan hindre operationer i et område, i betragtning af hvor lang tid det tager støv at sætte sig på månen.
Selvom der er nogle detaljer i papiret, herunder nogle arkitekturdiskussioner på højt niveau, der bruger rumtestet hardware, er denne idé indtil videre kun et koncept. Men med datoen for den menneskelige landing Artemis III nærmer sig hurtigt, ville NASA og andre rumorganisationer utvivlsomt drage fordel af en vellykket spejdermission som den, der er beskrevet i papiret. Hvorvidt de vil skubbe ideen over målstregen eller ej, skal dog vise sig.
Flere oplysninger: Roméo Tonasso et al., En måne-rekognosceringsdrone til samarbejdsudforskning og højopløsningskortlægning af ekstreme steder, Acta Astronautica (2024). DOI:10.1016/j.actaastro.2024.02.006
Leveret af Universe Today
Sidste artikelVideo:Ny radarmission for Europa
Næste artikelHvor længe vil avancerede civilisationer forsøge at kommunikere med os?
 Varme artikler
Varme artikler
-
 Billede:Solen i 2019Kredit:ESA/Royal Observatory of Belgium Vores sols skiftende aktivitet set af ESAs Proba-2-satellit i 2019. Satellitten overvåger kontinuerligt solen - et billede blev udvalgt til at repræsentere
Billede:Solen i 2019Kredit:ESA/Royal Observatory of Belgium Vores sols skiftende aktivitet set af ESAs Proba-2-satellit i 2019. Satellitten overvåger kontinuerligt solen - et billede blev udvalgt til at repræsentere -
 Skal vi skjule jorden for at skjule den for onde rumvæsener?En laserstråle baseret på Jorden eller placeret i kredsløb kan skjule Jordens transit for nysgerrige fremmede øjne. Loops7/Bethany Clarke/Getty Teoretisk fysiker Stephen Hawking vakte opsigt tilbage
Skal vi skjule jorden for at skjule den for onde rumvæsener?En laserstråle baseret på Jorden eller placeret i kredsløb kan skjule Jordens transit for nysgerrige fremmede øjne. Loops7/Bethany Clarke/Getty Teoretisk fysiker Stephen Hawking vakte opsigt tilbage -
 Billede:Hubbles dværgstørrelse, dobbelt navngivet galakseKredit:ESA/Hubble &NASA Galaksen NGC 178 kan være lille, men det giver et godt slag. Måler omkring 40, 000 lysår på tværs, dens diameter er mindre end halvdelen af Mælkevejen, og den er derfor k
Billede:Hubbles dværgstørrelse, dobbelt navngivet galakseKredit:ESA/Hubble &NASA Galaksen NGC 178 kan være lille, men det giver et godt slag. Måler omkring 40, 000 lysår på tværs, dens diameter er mindre end halvdelen af Mælkevejen, og den er derfor k -
 Et virtuelt vandrekort for Jezero-krateret, Mars 2020 Perseverance-rover-landingsstedetKortvisning med basisdatasæt, klikbare synspunkter er markeret som dråber. Kredit:HiRISE/CTX/HRSC Potentielle Mars-opdagelsesrejsende kan nu tage en vandretur rundt om landingsstedet for NASAs Mars
Et virtuelt vandrekort for Jezero-krateret, Mars 2020 Perseverance-rover-landingsstedetKortvisning med basisdatasæt, klikbare synspunkter er markeret som dråber. Kredit:HiRISE/CTX/HRSC Potentielle Mars-opdagelsesrejsende kan nu tage en vandretur rundt om landingsstedet for NASAs Mars