


Robot lærer sig selv at klæde folk på

En PR2-robot tager en kjole på Henry Clever, et medlem af forskergruppen. Kredit:Georgia Tech
Mere end 1 million amerikanere har brug for daglig fysisk assistance for at klæde sig på på grund af skader, sygdom og høj alder. Robotter kunne potentielt hjælpe, men tøj og menneskekroppen er komplekse.
For at hjælpe med at imødekomme dette behov, en robot på Georgia Institute of Technology er ved at skubbe hospitalskjoler på folks arme. Maskinen bruger ikke øjnene, når den trækker i kluden. I stedet, den er afhængig af de kræfter, den føler, når den fører tøjet på en persons hånd, rundt om albuen og på skulderen.
Maskinen, en PR2, lærte sig selv på én dag, ved at analysere næsten 11, 000 simulerede eksempler på en robot, der sætter en kjole på en menneskelig arm. Nogle af disse forsøg var fejlfri. Andre var spektakulære fejl - den simulerede robot påførte farlige kræfter på armen, når kluden ville fange personens hånd eller albue.
Ud fra disse eksempler, PR2's neurale netværk lærte at vurdere de kræfter, der påføres mennesket. I en vis forstand, simuleringerne gjorde det muligt for robotten at lære, hvordan det føles at være det menneske, der modtager assistance.
"Folk lærer nye færdigheder ved at prøve og fejle. Vi gav PR2 den samme mulighed, " sagde Zackory Erickson, den ledende Georgia Tech Ph.D. studerende på forskerholdet. "At lave tusindvis af forsøg på et menneske ville have været farligt, endsige umuligt kedeligt. Men på kun én dag, ved hjælp af simuleringer, robotten lærte, hvad en person kan føle fysisk, mens han klæder sig på."
Robotten lærte også at forudsige konsekvenserne af at flytte kjolen på forskellige måder. Nogle bevægelser gjorde kjolen stram, trækker hårdt mod personens krop. Andre bevægelser gled kjolen glat langs personens arm. Robotten bruger disse forudsigelser til at vælge bevægelser, der klæder armen komfortabelt.
Efter succes med simulering, PR2 forsøgte at klæde folk på. Deltagerne sad foran robotten og så på, hvordan den holdt en kjole og gled den på deres arme. I stedet for vision, robotten brugte sin følesans til at udføre opgaven ud fra, hvad den lærte om kræfter under simuleringerne.
"Nøglen er, at robotten altid tænker fremad, " sagde Charlie Kemp, en lektor i Wallace H. Coulter Department of Biomedical Engineering ved Georgia Tech and Emory University og det ledende fakultetsmedlem. "Det spørger sig selv, 'hvis jeg trækker kjolen denne vej, vil det forårsage mere eller mindre kraft på personens arm? Hvad ville der ske, hvis jeg gik den vej i stedet for?'"

Charlie Kemp og Zackory Erickson forbereder robotten. Kredit:Georgia Tech
Forskerne varierede robottens timing og tillod den at tænke så meget som en femtedel af et sekund ind i fremtiden, mens de lagde strategier om dens næste træk. Mindre end det fik robotten til at fejle oftere.
"Jo mere robotter kan forstå om os, jo mere de vil være i stand til at hjælpe os, " sagde Kemp. "Ved at forudsige de fysiske implikationer af deres handlinger, robotter kan yde assistance, der er mere sikker, mere behagelig og mere effektiv."
Robotten sætter i øjeblikket kjolen på den ene arm. Hele processen tager omkring 10 sekunder. Teamet siger, at det at klæde en person helt på er noget, der er mange skridt væk fra dette arbejde.
Sidste artikelHøjfølsomme mikrosensorer i horisonten
Næste artikelXerox afslutter fusionen med Fujifilm til sejr for aktionærerne
 Varme artikler
Varme artikler
-
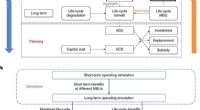 Nye rammer vurderer, optimerer den økonomiske værdi af lithium-ion-batterierEn skematisk viser de intertemporale beslutningsrammer til styring af nedbrydning af lithium-ion-batterier. en, Beslutningsvariabler, mål og centrale input til hver beslutning og deres relationer. b,
Nye rammer vurderer, optimerer den økonomiske værdi af lithium-ion-batterierEn skematisk viser de intertemporale beslutningsrammer til styring af nedbrydning af lithium-ion-batterier. en, Beslutningsvariabler, mål og centrale input til hver beslutning og deres relationer. b, -
 Apple løsner grebet om iPhone -reparationsarbejdeÆble, i et politisk skifte, vil gøre det lettere for forbrugerne at få reparationer til iPhones i uafhængige servicebutikker Apple sagde torsdag, at det vil begynde at levere dele og uddannelse ti
Apple løsner grebet om iPhone -reparationsarbejdeÆble, i et politisk skifte, vil gøre det lettere for forbrugerne at få reparationer til iPhones i uafhængige servicebutikker Apple sagde torsdag, at det vil begynde at levere dele og uddannelse ti -
 Frankfurt taber tysk biludstilling:arrangørerFrankfurt er synonymt med IAA International Motor Show Frankfurt, som har været synonymt med en af verdens største biludstillinger, IAA, i mere end 70 år, er blevet elimineret fra kapløbet om at
Frankfurt taber tysk biludstilling:arrangørerFrankfurt er synonymt med IAA International Motor Show Frankfurt, som har været synonymt med en af verdens største biludstillinger, IAA, i mere end 70 år, er blevet elimineret fra kapløbet om at -
 Uber trimmer flere medarbejdere, da de søger en vej til profitUber, som er flyttet til elcykler, lastbilkørsel, og scootere, forestiller sig at blive transportens Amazon i en fremtid, hvor folk deler i stedet for egne køretøjer Uber sagde tirsdag, at det afs
Uber trimmer flere medarbejdere, da de søger en vej til profitUber, som er flyttet til elcykler, lastbilkørsel, og scootere, forestiller sig at blive transportens Amazon i en fremtid, hvor folk deler i stedet for egne køretøjer Uber sagde tirsdag, at det afs
- Korrekt sted for et udendørs termometer
- Unge mænd på sexting:Det er normalt, men kompliceret
- Iboende ustablet dobbeltlagsgrafen til højhastigheds lithium-svovl-batterier
- NASAs jordfugtighedsdata fremmer globale afgrødeprognoser
- Udsigten tyder på Jordens varmeste periode nogensinde
- NASA ser Tropical Cyclone 02S udvikle sig i det sydlige Indiske Ocean