


SLAP:Samtidig lokalisering og planlægning af autonome robotter
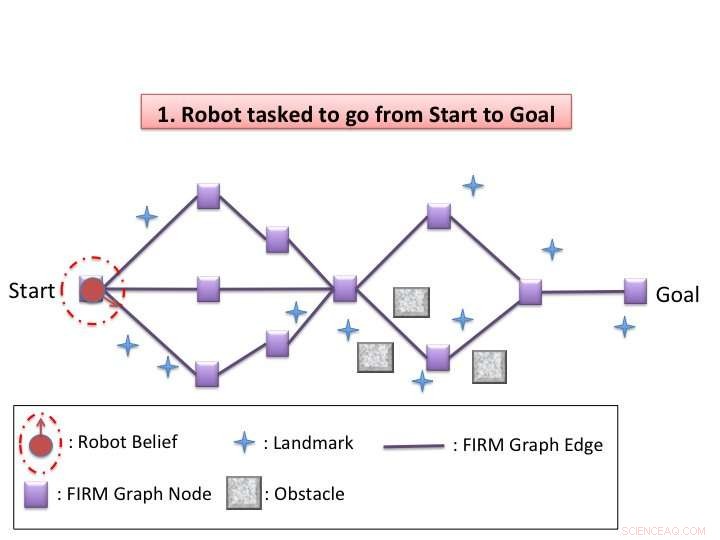
Algoritme illustration. Kredit:Agha-mohammadi et al.
Forskere ved NASA Jet Propulsion Laboratory (JPL), Texas A&M University, og Carnegie Mellon University har for nylig gennemført et forskningsprojekt, der har til formål at muliggøre simultan lokalisering og planlægning (SLAP) i autonome robotter. Deres papir, udgivet i IEEE -transaktioner på robotik , præsenterer et dynamisk omplanlægningsskema i trosrum, hvilket kan være særligt nyttigt for robotter, der opererer under usikkerhed, såsom i skiftende miljøer.
"Robotter, der opererer i den virkelige verden, skal håndtere usikkerhed, "Sung Kyun Kim, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "For eksempel, en Mars -rover skal navigere til videnskabelige målsteder, men det skal også undgå kollision med forhindringer. Dermed, både nøjagtig lokalisering og omkostningseffektiv stiplanlægning er vigtige muligheder. "
SLAP er en nøgleevne for autonome robotter, der opererer under usikkerhed, giver dem mulighed for effektivt at navigere mellem rum, undgå forhindringer, og planlægge deres vej til målplaceringer. En robots sekventielle beslutningsproces under usikkerhed kan formuleres som en POMDP (delvist observerbar Markov -beslutningsproces), som løbende skal løses online. Imidlertid, at sikre, at robotter effektivt og præcist løser POMDP'er, kan være betydeligt udfordrende.
"Vi kom med to hovedideer til at løse SLAP -problemer, "Forklarede Kim." Den ene er at bruge feedback -controllere til at gøre en trostilstand tilgængelig. Dette kan effektivt bryde historiens forbandelse, 'som hjælper os med at løse større problemer. Den anden er at dynamisk genplanere og forbedre beslutningen på løbetid, forbedring af løsningens kvalitet og robusthed. Dynamisk genplanlægning er især fordelagtig, når der er systemmodelleringsfejl, dynamiske miljøændringer, eller intermitterende sensor-/aktuatorfejl. "

Mars rover eksempel. Kredit:NASA/JPL-Caltech.
Kim og hans kolleger udarbejdede en dynamisk genplanlægning i trosrum, der gør det muligt for robotter effektivt at navigere i rummet omkring dem i situationer med usikkerhed, f.eks. i skiftende miljøer eller når de bliver præsenteret for uventede forhindringer. Deres algoritme har to faser, offline og online.
"I offlinefasen, vores algoritme konstruerer en sparsom graf i trosrum med en feedback -controller for hver node og løser derefter den grove globale politik (beslutter, hvilken handling der skal foretages i den aktuelle trostilstand) på grafen, "Sagde Kim." I online -fasen, dynamisk omplanlægning udføres hver gang trostilstanden opdateres. Algoritmen evaluerer lokalt hver handling ved at flytte til en nærliggende knude på grafen og vælger den med minimumsomkostningerne. Efter at have udført den valgte handling og opdateret den aktuelle overbevisning, det gentager omplanlægningsprocessen. "
Den ordning, som Kim og hans kolleger har udtænkt, udnytter feedbackkontrollernes adfærd i trosrum. Med andre ord, feedback -controllere fungerer som en tragt i trosrum, med en nærliggende trostilstand, der potentielt konvergerer med kontrolmålets trostilstand. Dette løser effektivt et centralt problem i løsningen af POMPD'er - eksponentiel kompleksitet i planlægningshorisonten.
Faktisk, når algoritmens nuværende tro konvergerer med en kendt tro, der er ingen grund til at overveje handlinger og observationer op til den nuværende tro. Dette fører i sidste ende til bedre skalerbarhed, gør det muligt for robotter at løse mere komplekse navigationsproblemer.
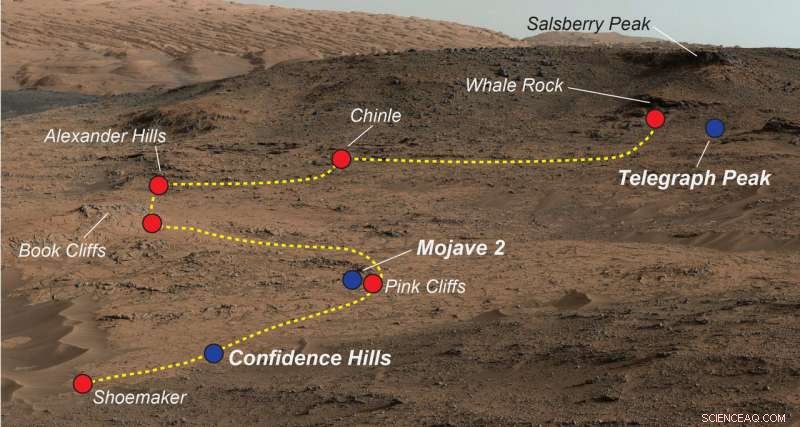
Mars rover eksempel. Kredit:NASA/JPL-Caltech/MSSS.
"Under dynamisk omplanlægning, den foreslåede metode starter den lokale optimering op med den (grove) globale politik, "Kim sagde." Det betyder, at det kan træffe en ikke-nærsynet beslutning, i modsætning til andre online planlæggere med en endelig tilbagegående horisont. Kort sagt, denne metode kan tilpasse sig dynamiske ændringer i miljøet og robust fungere på trods af en umodelleret forstyrrelse eller fejl, samtidig med at der laves omkostningseffektive planer i global forstand. "
Ved at eliminere unødvendige stabiliseringstrin, metoden, der er udtænkt af Kim og hans kolleger, udkonkurrerede feedback-baseret information roadmap (FIRM), en topmoderne teknik til løsning af POMDP'er. I fremtiden, denne dynamiske omplanlægningsordning i trosrum kan muliggøre bedre SLAP -kapaciteter i robotter, der opererer under varierende grad af usikkerhed.
"Vi planlægger nu at anvende vores metode til virkelige problemer, "Kim sagde." En mulig anvendelse er en prototype Mars-helikopter-rover-navigation og koordinering til planetarisk efterforskning, et projekt ledet af Dr. Ali-akbar Agha-mohammadi på JPL. En helikopter, der flyver over terrænet, kan give et groft kort, så der kan opnås en grov global politik i offline -fasen. Efterfølgende, en rover ville dynamisk genplanere i online -fasen, at udføre sikre og omkostningseffektive navigationsmissioner. "
© 2018 Tech Xplore
 Varme artikler
Varme artikler
-
 Optimering af netværkssoftware til at fremme videnskabelig opdagelseBrookhaven Lab samarbejdede med Columbia University, University of Edinburgh, og Intel for at optimere ydeevnen på en 144-node parallelcomputer bygget fra Intels Xeon Phi-processorer og Omni-Path-højh
Optimering af netværkssoftware til at fremme videnskabelig opdagelseBrookhaven Lab samarbejdede med Columbia University, University of Edinburgh, og Intel for at optimere ydeevnen på en 144-node parallelcomputer bygget fra Intels Xeon Phi-processorer og Omni-Path-højh -
 Australiens anti-kryptering lov skyndte sig at blive vedtagetKredit:CC0 Public Domain En nyligt vedtaget lov, der hastede igennem Australiens parlament, vil tvinge teknologivirksomheder som Apple, Facebook og Google for at deaktivere krypteringsbeskyttelse,
Australiens anti-kryptering lov skyndte sig at blive vedtagetKredit:CC0 Public Domain En nyligt vedtaget lov, der hastede igennem Australiens parlament, vil tvinge teknologivirksomheder som Apple, Facebook og Google for at deaktivere krypteringsbeskyttelse, -
 Engelsktalende er mere tilbøjelige til at modtage rådgivning om automatisk selvmordsforebyggelseKredit:CC0 Public Domain Når brugere af Googles søgemaskine sender selvmordsrelaterede forespørgsler, de er gentagne gange forsynet med hotline-hotlines om selvmordsforebyggelse. Men om sådanne op
Engelsktalende er mere tilbøjelige til at modtage rådgivning om automatisk selvmordsforebyggelseKredit:CC0 Public Domain Når brugere af Googles søgemaskine sender selvmordsrelaterede forespørgsler, de er gentagne gange forsynet med hotline-hotlines om selvmordsforebyggelse. Men om sådanne op -
 Lytte til motorblade for at stoppe fejl, katastroferForskere fra Purdue University har udviklet et overvågningssystem til at detektere en af de mest almindelige årsager til for tidlig bladfejl i gasturbinemotorer - rotor-tvungen reaktionsvibration. K
Lytte til motorblade for at stoppe fejl, katastroferForskere fra Purdue University har udviklet et overvågningssystem til at detektere en af de mest almindelige årsager til for tidlig bladfejl i gasturbinemotorer - rotor-tvungen reaktionsvibration. K
- Bredbåndsforbedring er afhængig af præcis tilt
- At finde 1154 huller i jorden... og en gåde
- Anvendelser til solsikkefrøskaller
- Fyr, der satte papirrekordets verdensrekord, viser, hvordan det er gjort
- Sådan identificeres giftige svampe
- Tyske fiskeres skepsis over for EU hindrer overholdelsen af dets regler