


Nogle robotter går. Andre flyver. Han byggede en, der kan begge dele.
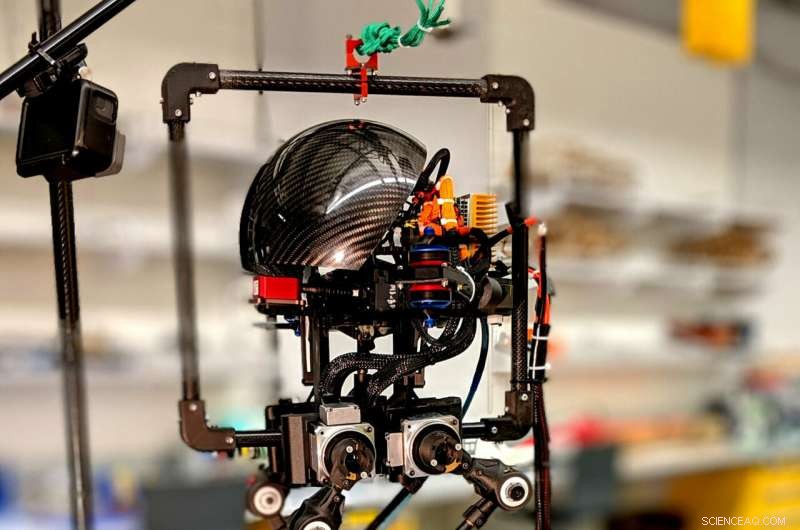
Leo står omkring to og en halv fod høj, på tynd, bøjede ben. Kredit:Alireza Ramezani, Soon-Jo Chung, og Morteza Gharib
En tobenet robot går på overfladen af en fjern planet. Dens sensorer scanner miljøet, sender data tilbage til Jorden. Det kommer til en smuldrende bjergskråning, bøjer knæene og springer, thrustere hvirvlende, at lande sikkert over den løse sten.
Denne fremtid er stadig en fjern drøm væk, men Alireza Ramezani, en assisterende professor i el- og computerteknik på Northeastern, har bragt det et skridt nærmere med sin nye robot.
Robotten er kendt som LEONARDO, et akronym for LEg ON Aerial Robotic DrOne, eller Leo for kort. Det har en kapacitet, de fleste robotter i disse dage bare ikke har:Det kan både gå og flyve.
"I første omgang, det blev udviklet med ideen om at designe opdagelsesrejsende - systemer, der kan kombinere benmobilitet og hurtig luftmobilitet til at foretage autonome udforskninger, "Sagde Ramezani.
Leo står omkring to og en halv fod høj, på tynd, bøjede ben. Med en krop fremstillet primært af kulfiber, robotten er stærk, men vejer kun seks kilo. Den har thrustere på hver side af det, Ramezani omtaler som torso. Disse er i stand til at give tryk i begge retninger, og er stærke nok til flyvning. Men det er ikke deres primære funktion.
"Ideen er ikke at oprette en quadcopter, "Ramezani sagde." Ideen er at have en maskine, der kan udnytte benene og thrusterne til, for eksempel, forbedre dens springkapacitet. "
Thrustere kan også hjælpe med at stabilisere robotten på ujævne overflader, eller fang den, hvis den begynder at falde.
"Dette er den største udfordring for benede systemer, eller endda mennesker:Vi kan stabilisere vores krop, men nogle gange falder vi, "Sagde Ramezani." Hvad hvis vi kunne have en robot, der aldrig falder? "
Ramezani begyndte at studere benede robotsystemer under sit kandidatarbejde ved University of Michigan. Vandrerobotter kæmper ofte på ujævnt terræn. På det tidspunkt, han spekulerede på, om der var en måde at indsætte en airbag til at dæmpe en faldende robot. Nu har han designet en robot, der kan fange sig selv.
Ideen kom fra at se fugle, Sagde Ramezani. De fleste robotdesign fokuserer udelukkende på en type bevægelse, men fugle kan gå, flyve, og endda løbe.
"Du kan se konstruktion til perfektion i naturen, og vi kan lære meget, sagde Ramezani, der også har bygget en flyvende robot baseret på flagermusens luftakrobatik. "Det har været en inspiration for mig i næsten alle mine designs."
Da Ramezani sluttede sig til det nordøstlige efterår, Leo blev tilbage på California Institute of Technology, hvor Ramezani havde været postdoktor. Han planlægger at bygge en opdateret version af robotten i Boston, for nordøstlige elever at bruge som en læringsplatform.
"På dette tidspunkt, Jeg ser på dette som en meget god platform til at skubbe til agil robotik. Tænk på en robot, der bogstaveligt talt aldrig falder:Den kan forhandle om ujævnt terræn, den kan flyve, det kan hoppe. Et ultra-kompatibelt system, "Sagde Ramezani." Ned ad vejen, vi kan bruge en maskine som denne til efterforskning. "
 Varme artikler
Varme artikler
-
 Sikring af radiologiske kilder på fartenEn brøndlogningskonfiguration til MSTS består af strålingsmåleudstyr, radiofrekvensmærker og anden tabsdetektionsteknologi. MSTS, udviklet af PNNL, har fået licens til Golden Security Services. Kredit
Sikring af radiologiske kilder på fartenEn brøndlogningskonfiguration til MSTS består af strålingsmåleudstyr, radiofrekvensmærker og anden tabsdetektionsteknologi. MSTS, udviklet af PNNL, har fået licens til Golden Security Services. Kredit -
 Forskere skaber en AI for at hjælpe os med at forstå privatlivspolitikkerEt nyt kunstig intelligens-værktøj, der er skabt til at hjælpe med at identificere visse former for stofmisbrug baseret på en hjemløs ungdoms Facebook-opslag, kunne give hjemløse krisecentre vital inf
Forskere skaber en AI for at hjælpe os med at forstå privatlivspolitikkerEt nyt kunstig intelligens-værktøj, der er skabt til at hjælpe med at identificere visse former for stofmisbrug baseret på en hjemløs ungdoms Facebook-opslag, kunne give hjemløse krisecentre vital inf -
 Omvendte perovskit -solceller med en effektomdannelseseffektivitet på 22,3%Figur, der viser ligandforankringsstrategien udviklet af forskerne. Kredit:Zheng et al. Fotovoltaiske (PV) celler, som kan generere energi fra solen, kunne være meget nyttig i håndteringen af de
Omvendte perovskit -solceller med en effektomdannelseseffektivitet på 22,3%Figur, der viser ligandforankringsstrategien udviklet af forskerne. Kredit:Zheng et al. Fotovoltaiske (PV) celler, som kan generere energi fra solen, kunne være meget nyttig i håndteringen af de -
 Facebook afslører nye sikkerhedsforanstaltninger til valget i USA i 2020Facebooks administrerende direktør Mark Zuckerberg siger, at han er mere sikker på det sociale netværks reaktion på udenlandske manipulationsbestræbelser Facebook sagde mandag, at det strammede si
Facebook afslører nye sikkerhedsforanstaltninger til valget i USA i 2020Facebooks administrerende direktør Mark Zuckerberg siger, at han er mere sikker på det sociale netværks reaktion på udenlandske manipulationsbestræbelser Facebook sagde mandag, at det strammede si
- Grafenelektronik:Enkelttrinsteknik producerer både P-type og N-type doping til fremtidige enheder
- Største, ældste Maya-monument antyder vigtigheden af fællesarbejde
- Materialevidenskabelige forskere udvikler første elektrisk injicerede laser
- Nanoengineering integrerer krystaller, der normalt ikke passer sammen
- Professorer reflekterer over spørgsmålet om klimaforandringer i Trumps administration
- Sprint og T-Mobile-fusion godkendt af føderal dommer:Hvad det betyder for forbrugerne