


Implementering af kick-kontrol på simulerede robotter med hjul i den virkelige verden
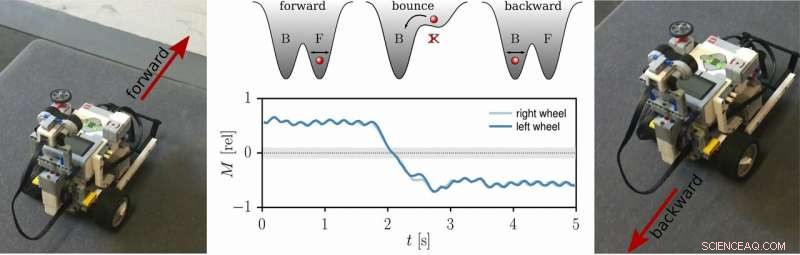
Viser, hvordan robotten selvstændigt ændrer bevægelsesretningerne, når den rammer en væg. Kredit:Sándor et al.
Et team af forskere ved Babes-Bolyai University, i Rumænien, og Goethe-universitetet i Frankfurt har for nylig samarbejdet om en undersøgelse, der udforsker implementeringer af kick-kontrol på både simulerede og virkelige hjul-robotter. Udtrykket 'sparkkontrol' refererer til korte, højere ordens kommandoer, der kan bruges til at 'sparke' et system fra en selvorganiseret attraktor ind i tiltrækningsbassinet for en anden attraktor.
"Når vi flytter, reagerer vores muskler bare på de signaler hjernen sender, eller tager de også hensyn til leddenes tilstand, af senerne og af selve musklerne?" spurgte Claudius Gros, en af de forskere, der har udført undersøgelsen. "Man taler om 'legemeliggjort bevægelse', ' hvis sidstnævnte er tilfældet. Vores forskning er dedikeret til at undersøge, hvordan legemliggørelse hjælper dyr og robotter med at navigere i verden."
I naturen, selv dyr med simple nervesystemer kan navigere i en række komplekse miljøer. For at bevæge sig rundt i både kendte og ukendte miljøer, robotter bør have lignende sansemotoriske færdigheder. Indtil nu, imidlertid, videnskabsmænd og ingeniører verden over har kæmpet for at designe robotter med motoriske egenskaber, der ligner menneskers og dyrs.
"At koordinere et stort antal aktuatorer i et konstant skiftende miljø er bestemt en udfordrende opgave, " Bulcsú Sándor, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Så hvorfor lader vi ikke robottens krop gøre det hårde arbejde, ved at overtage en væsentlig del af beregningen? Efter denne idé, vi foreslår et alternativt kontrolskema, hvor bevægelsesmønstre genereres på en selvorganiseret måde. Inden for denne ramme, bevægelse skabes via en dynamisk interaktion mellem hjernen og robottens krop, og miljøet."
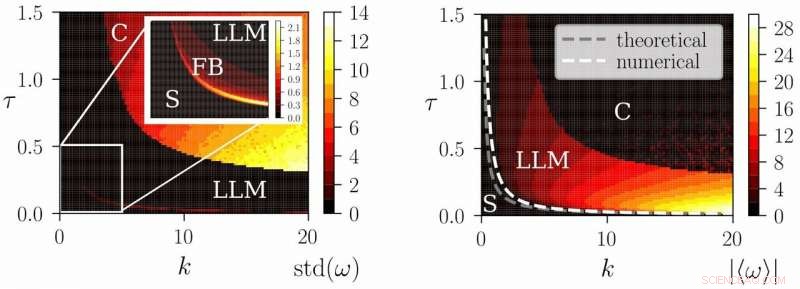
Fasediagram af systemet:dynamisk adfærd som en funktion af regulatorens parametre.
Sándor, Gros og deres kolleger udtænkte en controllerramme, hvor bevægelser ikke er stift defineret, men er snarere beskrevet af et sæt ligninger til styring af aktuatorer, der dynamisk ændrer sig, inkorporerer kroppens proprio-sensoriske informationer. De testede og forfinede derefter disse ligninger i LPZRobots simuleringsmiljø.
"På grund af robottens interaktion med dens omgivelser, flere selvorganiserede bevægelsesmønstre kan skabes, ", sagde Sándor. "Dette giver os mulighed for at skifte mellem disse adfærdsmæssige primitiver ved hjælp af et veldefineret kick-lignende kontrolsignal. Det er det, vi kalder "sparkkontrol". Endelig, som et bevis på konceptet, vi implementerede denne idé på robotter på hjul."
At koordinere sammentrækningen af de mange muskler i kroppen er en meget udfordrende opgave, som er medfødt erhvervet af de fleste mennesker og dyr. I deres undersøgelse, Sándor, Gros og deres kolleger forsøgte at udtænke en lettere metode til at indgyde motoriske færdigheder til robotter.
-
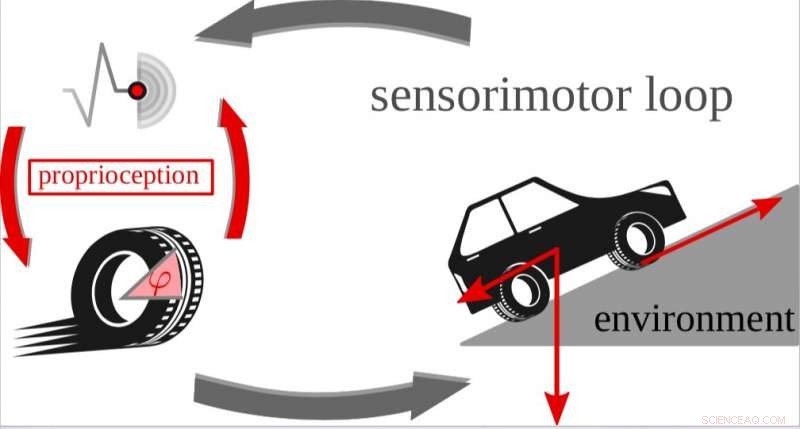
Skitse af en kompatibel sensorimotor sløjfe, i stand til at tilpasse sig miljøet. Kredit:Sándor et al.
-
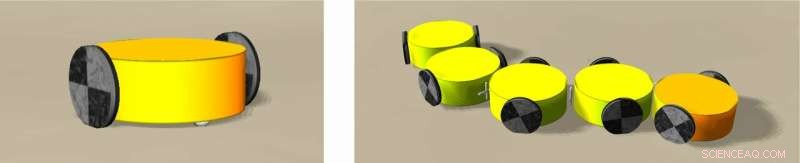
Simulerede robotter (én bil, 5 biler forbundet til et tog). Kredit:Sándor et al.
-
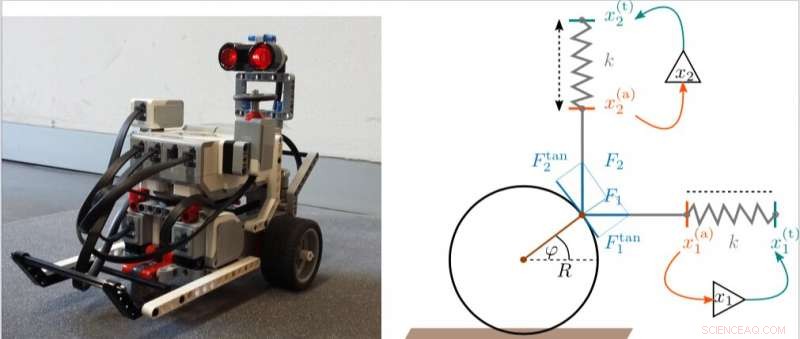
Lego-robot og kontrolmekanismen vi brugte. Kredit:Sándor et al.
-
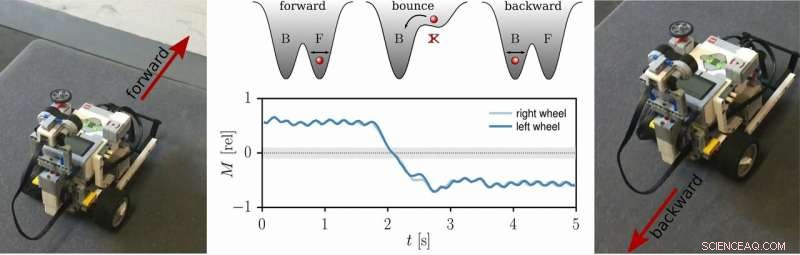
Viser, hvordan robotten selvstændigt ændrer bevægelsesretningerne, når den rammer en væg. Kredit:Sándor et al.
"Ville det ikke være meget nemmere, hvis hjernen bare ville give et kort kicksignal, og kroppen på enten et dyr eller robot ville udføre en velkoordineret bevægelse af sig selv?" sagde Gros. "Dette er nøgleideen bag kick control. Det kan realiseres, som vi opdagede, når robotten råder over selvorganiserede aktuatorer."
Forskerne evaluerede deres rammer på både simulerede og virkelige hjulrobotter, genererer dynamikken i forskellige hjul uafhængigt via lokale feedback-sløjfer. Disse feedback-løkker medieres af hastighedskodende neuroner, som behandler propriosensoriske input, der beskriver den faktiske rotationsvinkel for hvert hjul. Efterfølgende en simuleret transmissionsstang, der ligner dem, der bruges i damplokomotiver, omsætter ændringer i neural aktivitet til en rotationsbevægelse.
"Vi demonstrerer, hvordan selvorganiserede bevægelsesmønstre kan bruges til at generere kropslig bevægelse, ", sagde Sándor. "Brug af denne kontrolordning kan hjælpe med at forenkle komplekse beregninger, der skal udføres for at fuldføre forskellige bevægelsesopgaver. At kombinere det med andre metoder kan føre til kraftfulde værktøjer til at generere kompleks robotadfærd. Vores rammer kan også bidrage til forståelsen af dyrs og menneskers bevægelse."
Undersøgelsen udført af Sándor, Gros og deres kolleger kunne føre til en ny teknik til effektivt at kontrollere robotters bevægelser. Den vigtigste praktiske fordel ved deres ramme er, at den tildeler en del af beregningsbelastningen til robottens krop. Deres model kunne også bruges til at undervise i dynamiske systemer i gymnasiets fysikkurser, da det giver mulighed for interaktive og engagerende demonstrationer.
Forskerne planlægger nu at teste deres algoritmer på mere komplekse robotarkitekturer, inkorporerer forskellige sansemodaliteter i deres ligninger. For eksempel, de kunne anvende kick control til en hierarkisk organisation af controllere, hvor visuel information udløser en bestemt bevægelsestilstand.
"Vi arbejder i øjeblikket på at generalisere vores principper til robotter med ben, især hexapoder, og vores første resultater er lovende, " sagde Gros. "Vi undersøger også aktiveringen af sparkkontrol ved hjælp af sensorisk information."
© 2019 Science X Network
Sidste artikelSætte neurale netværk under lup
Næste artikelFacebook:fra Harvard -sovesal til globalt fænomen
 Varme artikler
Varme artikler
-
 En platform for Afrikas mobile innovatørerAfrika taler, som tilbyder udviklere stemme- og tekstfunktioner at tilføje til deres løsninger, beskæftiger omkring 160 mennesker og skalerer hurtigt rundt i Afrika. Kredit:Africas Talking Sam Gik
En platform for Afrikas mobile innovatørerAfrika taler, som tilbyder udviklere stemme- og tekstfunktioner at tilføje til deres løsninger, beskæftiger omkring 160 mennesker og skalerer hurtigt rundt i Afrika. Kredit:Africas Talking Sam Gik -
 Skulle du være bekymret for, at Google vil klare alle dine pligter?Kredit:CC0 Public Domain Google vil en dag kunne køre bil for dig. Det kan hjælpe dig med at skrive dine e-mails og afslutte dine tanker nu, automatisk. Og nu, i et uhyggeligt syn på fremtiden, de
Skulle du være bekymret for, at Google vil klare alle dine pligter?Kredit:CC0 Public Domain Google vil en dag kunne køre bil for dig. Det kan hjælpe dig med at skrive dine e-mails og afslutte dine tanker nu, automatisk. Og nu, i et uhyggeligt syn på fremtiden, de -
 Leder af Boeings 737 MAX -program for at gå på pension:selskabsnotatLederen af Boeings 737 -program går på pension, da selskabet forbereder sig på at overtale tilsynsmyndighederne til at lade flyet vende tilbage til service efter to dødelige styrt Lederen af B
Leder af Boeings 737 MAX -program for at gå på pension:selskabsnotatLederen af Boeings 737 -program går på pension, da selskabet forbereder sig på at overtale tilsynsmyndighederne til at lade flyet vende tilbage til service efter to dødelige styrt Lederen af B -
 Google reformerer regler for seksuel forseelseI denne 8. maj, 2018, fil foto, Google CEO Sundar Pichai taler på Google I/O -konferencen i Mountain View, Californien. Google lover at være mere kraftfuld og åben over for håndteringen af sager om
Google reformerer regler for seksuel forseelseI denne 8. maj, 2018, fil foto, Google CEO Sundar Pichai taler på Google I/O -konferencen i Mountain View, Californien. Google lover at være mere kraftfuld og åben over for håndteringen af sager om
- Territorial forvaltning og styring af den colombianske Amazonas af oprindelige folk
- Forskere undersøger ressourceknaphed og fattigdomsfælder i Tanzanias kyst
- Der er et insekt "apokalypse" - og dets virkelig dårlige
- Billede:Mackenzie-floden i Canadas nordvestlige territorier
- Ekstraplanar diffus ioniseret gas opdaget i en nærliggende galakse
- London-domstolen skal tage stilling til, om Uber skal fortsætte med at operere