


Partikelrobot fungerer som en klynge af simple enheder

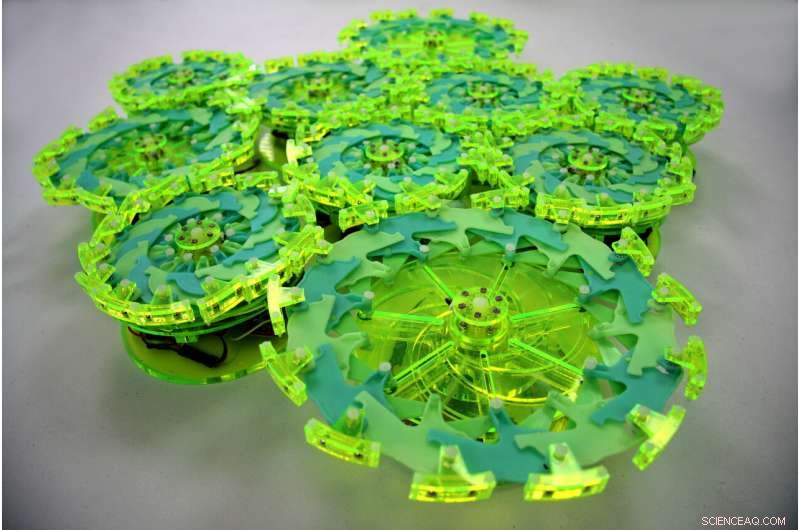
Forskere fra MIT og andre steder har udviklet beregningsmæssigt simple robotter, der forbinder sig i store grupper for at bevæge sig rundt, transport af genstande, og udføre andre opgaver. Kredit:Felice Frankel
At tage et signal fra biologiske celler, forskere fra MIT, Columbia University, og andre steder har udviklet beregningsmæssigt simple robotter, der forbinder sig i store grupper for at bevæge sig rundt, transport af genstande, og udføre andre opgaver.
Dette såkaldte "partikelrobotik"-system - baseret på et projekt af MIT, Columbia Engineering, Cornell University, og Harvard University-forskere – omfatter mange individuelle skiveformede enheder, der passende kaldes "partikler". Partiklerne er løst forbundet med magneter rundt om deres omkreds. Hver partikel kan kun gøre to ting:udvide og trække sig sammen. Men den bevægelse, når nøje timet, tillader de enkelte partikler at skubbe og trække hinanden i koordineret bevægelse. Indbyggede sensorer gør det muligt for klyngen at gravitere mod lyskilder.
I en Natur papir, forskerne demonstrerer en klynge af to dusin rigtige robotpartikler og en virtuel simulering på op til 100, 000 partikler, der bevæger sig gennem forhindringer mod en pære. De viser også, at en partikelrobot kan transportere genstande placeret i dens midte.
Partikelrobotter kan dannes i mange konfigurationer og flydende navigere rundt om forhindringer og presse sig gennem snævre huller. Især ingen af partiklerne kommunikerer direkte med eller stoler på hinanden for at fungere, så partikler kan tilføjes eller trækkes fra uden nogen indflydelse på gruppen. I deres papir, forskerne viser, at partikelrobotsystemer kan udføre opgaver, selv når mange enheder fejler.
Avisen repræsenterer en ny måde at tænke robotter på, som traditionelt er designet til ét formål, omfatter mange komplekse dele, og stop med at arbejde, når en del fejler. Robotter, der består af disse forenklede komponenter, siger forskerne, kunne muliggøre mere skalerbar, fleksibel, og robuste systemer.
"Vi har små robotceller, der ikke er så dygtige som enkeltpersoner, men som kan udrette meget som gruppe, " siger Daniela Rus, direktør for Computer Science and Artificial Intelligence Laboratory (CSAIL) og Andrew og Erna Viterbi professor i elektroteknik og datalogi. "Roboten i sig selv er statisk, men når den forbinder med andre robotpartikler, Pludselig kan robotkollektivet udforske verden og kontrollere mere komplekse handlinger. Med disse 'universelle celler, ' robotpartiklerne kan opnå forskellige former, global transformation, global bevægelse, global adfærd, og, som vi har vist i vores eksperimenter, følg lysgradienter. Det er meget kraftfuldt."
Sammen med Rus på papiret er:første forfatter Shuguang Li, en CSAIL postdoc; co-first forfatter Richa Batra og tilsvarende forfatter Hod Lipson, begge fra Columbia Engineering; David Brown, Hyun-Dong Chang, og Nikhil Ranganathan fra Cornell; og Chuck Hoberman fra Harvard.
På MIT, Rus har arbejdet på modulære, forbundne robotter i næsten 20 år, inklusiv en ekspanderende og sammentrækkende kuberobot, der kunne oprette forbindelse til andre for at bevæge sig rundt. Men den firkantede form begrænsede robotternes gruppebevægelser og konfigurationer.
I samarbejde med Lipsons laboratorium, hvor Li var kandidatstuderende, indtil han kom til MIT i 2014, forskerne gik efter skiveformede mekanismer, der kan rotere rundt om hinanden. De kan også forbinde og afbryde hinanden, og dannes i mange konfigurationer.
Hver enhed af en partikelrobot har en cylindrisk base, som rummer et batteri, en lille motor, sensorer, der registrerer lysintensitet, en mikrocontroller, og en kommunikationskomponent, der udsender og modtager signaler. På toppen er monteret et børnelegetøj kaldet en Hoberman Flight Ring - dens opfinder er en af avisens medforfattere - som består af små paneler forbundet i en cirkulær formation, der kan trækkes for at udvide og skubbes tilbage for at trække sig sammen. To små magneter er installeret i hvert panel.
Tricket var at programmere robotpartiklerne til at udvide sig og trække sig sammen i en nøjagtig rækkefølge for at skubbe og trække hele gruppen mod en destinationslyskilde. For at gøre det, forskerne udstyrede hver partikel med en algoritme, der analyserer udsendt information om lysintensitet fra hver anden partikel, uden behov for direkte partikel-til-partikel-kommunikation.
En partikels sensorer registrerer intensiteten af lys fra en lyskilde; jo tættere partiklen er på lyskilden, jo større intensitet. Hver partikel udsender konstant et signal, der deler dets opfattede intensitetsniveau med alle andre partikler. Lad os sige, at et partikelrobotsystem måler lysintensiteten på en skala fra niveau 1 til 10:Partikler tættest på lyset registrerer et niveau 10, og de længstliggende vil registrere niveau 1. Intensitetsniveauet, på tur, svarer til en bestemt tid, som partiklen skal udvide sig. Partikler, der oplever den højeste intensitet - niveau 10 - udvider sig først. Når disse partikler trækker sig sammen, de næste partikler i rækkefølge, niveau 9, derefter udvide. Den tidsindstillede ekspanderende og sammentrækkende bevægelse sker på hvert efterfølgende niveau.
Partikelrobotter er sammensat af løst koblede komponenter, eller partikler, der mangler en individuel identitet eller adresserbar position. De er kun i stand til en simpel bevægelse - ekspansion og sammentrækning. Imidlertid, når en gruppe af partikler er koordineret til at bevæge sig som et kollektiv, interessant adfærd observeres. Selv i amorfe konfigurationer, partikelrobotter udnytter statistiske mekaniske fænomener til at producere bevægelse. Kredit:Shuguang Li/Columbia Engineering
"Dette skaber en mekanisk ekspansion-sammentrækningsbølge, en koordineret skubbe- og trækbevægelse, der flytter en stor klynge mod eller væk fra miljøstimuli, " siger Li. Nøglekomponenten, Li tilføjer, er den præcise timing fra et delt synkroniseret ur blandt partiklerne, der muliggør bevægelse så effektivt som muligt:"Hvis du ødelægger det synkroniserede ur, systemet vil fungere mindre effektivt."
I videoer, forskerne demonstrerer et partikelrobotsystem, der består af rigtige partikler, der bevæger sig og skifter retning mod forskellige pærer, mens de tændes, og arbejder sig gennem et hul mellem forhindringer. I deres papir, forskerne viser også, at simulerede klynger på op til 10, 000 partikler opretholder bevægelsen, med halvdelen af deres hastighed, selv med op til 20 procent af enhederne fejlede.
"Det er lidt ligesom det ordsprogede "grå snask, '" siger Lipson, professor i maskinteknik ved Columbia Engineering, refererer til science-fiction-konceptet om en selvreplikerende robot, der omfatter milliarder af nanobots. "Den vigtigste nyhed her er, at du har en ny slags robot, der ikke har nogen centraliseret kontrol, intet enkelt fejlpunkt, ingen fast form, og dens komponenter har ingen unik identitet."
Det næste skridt, Lipson tilføjer, miniaturiserer komponenterne for at lave en robot, der består af millioner af mikroskopiske partikler.
Sidste artikelMIT-holds plukke- og placeringssystem er på et andet niveau
Næste artikelDataloger skaber programmerbart selvsamlende DNA
 Varme artikler
Varme artikler
-
 Hvornår flyver biler? Japan vil have luftbårne køretøjer til at letteJapans regering håber, at den private sektor vil hjælpe med at gøre flyvende biler til en realitet Det lyder måske som en kage i himlen, men Japans regering satser på en fremtid med flyvende biler
Hvornår flyver biler? Japan vil have luftbårne køretøjer til at letteJapans regering håber, at den private sektor vil hjælpe med at gøre flyvende biler til en realitet Det lyder måske som en kage i himlen, men Japans regering satser på en fremtid med flyvende biler -
 Google præciserer politikken for placeringssporingI denne 8. aug. 2018, filbillede en mobiltelefon viser en brugers rejser ved hjælp af Google Maps i New York. Dage efter en Associated Press-undersøgelse afslørede, at Google gemmer brugernes placerin
Google præciserer politikken for placeringssporingI denne 8. aug. 2018, filbillede en mobiltelefon viser en brugers rejser ved hjælp af Google Maps i New York. Dage efter en Associated Press-undersøgelse afslørede, at Google gemmer brugernes placerin -
 At sætte det smarte i produktionenKredit:istockphoto.com/chombosan Selvom smartphones og tablets er allestedsnærværende, mange af de virksomheder, der fremstiller vores daglige forbrugerprodukter, er stadig afhængige af papirspor
At sætte det smarte i produktionenKredit:istockphoto.com/chombosan Selvom smartphones og tablets er allestedsnærværende, mange af de virksomheder, der fremstiller vores daglige forbrugerprodukter, er stadig afhængige af papirspor -
 Historikeres arkivforskning ser ganske anderledes ud i den digitale tidsalderI dag, og ind i fremtiden, konsultation af arkivdokumenter betyder i stigende grad at læse dem på en skærm. Kredit:Shutterstock Vores samfunds historiske optegnelser gennemgår en dramatisk transfo
Historikeres arkivforskning ser ganske anderledes ud i den digitale tidsalderI dag, og ind i fremtiden, konsultation af arkivdokumenter betyder i stigende grad at læse dem på en skærm. Kredit:Shutterstock Vores samfunds historiske optegnelser gennemgår en dramatisk transfo
- Forbrydelse i vinstokkene:Alsace bekæmper druetyveri på hesteryg
- Er vores søer på randen af kvælning?
- Purdue lægemiddelopdagelse har til formål at finde bedre lægemiddelpas, undgå medicintragedier s…
- Sådan bestemmes minimumskoefficienten for statisk friktion
- Søer tredobler mængden af kulstof, de begraver som reaktion på menneskelig forstyrrelse af glob…
- Lyft -værdien springer til $ 15,1 mia. I ny finansieringsrunde