


En global bevægelsesplanlægningstilgang baseret på lokale erfaringer
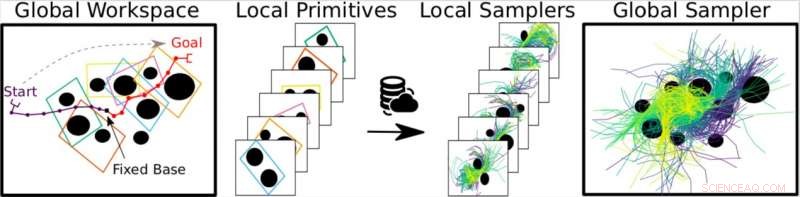
En illustration af den foreslåede ramme i en plan manipulator. Kredit:Chamzas, Shrivastava og Kavraki.
Mens mennesker kan udføre bevægelser naturligt og øjeblikkeligt, robotter kræver avancerede bevægelsesplanlægningsstrategier for at navigere i deres omgivelser. Bevægelsesplanlægning er således et nøgleområde inden for robotforskning, rettet mod at udvikle værktøjer og teknikker, der tillader robotter at operere autonomt i en række forskellige miljøer.
Mens tidligere undersøgelser har introduceret en række forskellige bevægelsesplanlægningsteknikker, især prøveudtagningsbaserede algoritmer, de fleste af dem fungerer ikke optimalt i alle miljøer. En vigtig begrænsning ved mange af disse tilgange er, at de tilnærmer forbindelsen mellem højdimensionelle rum med et lille antal prøver, hvilket hindrer deres ydeevne i scenarier, hvor områder, der er nødvendige for at forbinde rummet, har en lav sandsynlighed for at blive samplet. Dette kaldes almindeligvis "problemet med smalle passager".
For at imødegå begrænsningerne ved eksisterende bevægelsesplanlægningsmetoder, forskere ved Rice University, i Texas, har udviklet en ny tilgang, der nedbryder arbejdsområdet til lokale primitiver, huske deres lokale oplevelser i form af lokale prøvetagere og gemme disse i en database. Deres metode, skitseret i et papir, der er forududgivet på arXiv, er hovedsageligt et proof of concept, da den indtil videre kun er blevet testet i en ret forenklet geometrisk indstilling. Ikke desto mindre, disse forskeres arbejde har potentialet til at løse nogle centrale udfordringer, man støder på i bevægelsesplanlægningsforskning.
"Vores undersøgelse fokuserede udelukkende på det geometriske problem med bevægelsesplanlægning, "Constantinos Chamzas, en af de forskere, der har udført undersøgelsen, fortalte TechXplore . "I en nøddeskal, du har en robot og nogle forhindringer, og du vil finde en vej til at flytte din robot fra punkt A til punkt B uden at kollidere med forhindringerne."
Ud over disse generelle bevægelsesplanlægningsmuligheder, i virkelige scenarier (f.eks. mens de udfører huslige pligter) bør en robot også løse kontinuerligt gentagne bevægelsesplanlægningsforespørgsler. De fleste eksisterende bevægelsesplanlægningsmetoder tvinger robotter til at fuldføre virkelige opgaver ved at løse nye forespørgsler fra bunden, selvom en ny forespørgsel ligner en, der blev gennemført med succes tidligere.

Eksempel på en robot, der samler cylindre op fra en reol, som er en opgave med gentagne bevægelsesplanlægningsforespørgsler. Kredit:Chamzas, Shrivastava og Kavraki.
Forskere forsøger derfor at udvikle nye teknikker, der bruger løsningerne til tidligere bevægelsesplaner for at informere søgen efter en løsning på en ny lignende bevægelsesplanlægningsforespørgsel. Den tilgang, som Chamzas og hans kolleger har udtænkt, opnår dette ved at bruge tidligere miljørelateret viden, der specifikt retter sig mod tidligere stødte snævre passager for at tilpasse sin prøveudtagningsstrategi til det aktuelle problem.
"Under træningen den foreslåede metode deler det givne problem op i lettere delproblemer, løse hver enkelt for sig, og derefter gemmer disse underløsninger i en database i form af sampling distributioner, "Forklarede Chamzas." Når der opstår et nyt planlægningsproblem, det globale problem dekomponeres til lokale igen, og vores metode henter de relevante stikprøvefordelinger, der svarer til de lokale, for at skabe en global stikprøvefordeling, der guider søgningen meget mere informativt."
I det væsentlige, bevægelsesplanlægningstilgangen udtænkt af Chamzas og hans kolleger deler et problem op i underproblemer, kombinere traditionelle databasemetoder med informeret prøveudtagning. Dette adskiller det fra eksisterende tilgange, som typisk bruger en database med forudberegnede løsninger, der repareres ved runtime eller bruger modeller, der forsøger at udlede en god samplingsfordeling for et givet miljø.
"De to vigtigste bidrag fra vores undersøgelse er, at visse problemer, som tidligere var praktisk talt umulige at løse med traditionelle metoder, kan løses ved at blive dekomponeret, og at brug af denne kombination af databaser/sampling er mere effektiv i visse tilfælde end andre metoder, "Sagde Chamzas.
Indtil nu, forskerne har vurderet deres metode i indledende test med simple geometriske primitiver. Resultaterne er lovende, da deres metode tillod dem at løse problemer, som tidligere tilgange enten ikke var i stand til at løse eller løste meget dårligt.
I fremtiden, tilgangen foreslået af Chamzas og hans kolleger kunne hjælpe med at overvinde nogle af begrænsningerne ved eksisterende bevægelsesplanlægningstilgange, gør det muligt for robotter at overføre tidligere erhvervet viden til forskellige miljøer og dermed forbedre deres ydeevne. Forskerne planlægger nu at anvende den samme tilgang i mere komplicerede geometriske miljøer. De vil også gerne udforske måder, hvorpå deres metode kunne lære stikprøvefordelinger, frem for at tilpasse dem til ældre løsninger.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Online trove af Instagram influencer info ubevogtetOphævelse af oplysninger fra Instagram-konti er imod politikker på det foto- og videocentriske sociale netværk, der ejes af Facebook Instagram forsøgte mandag at finde ud af, hvordan private konta
Online trove af Instagram influencer info ubevogtetOphævelse af oplysninger fra Instagram-konti er imod politikker på det foto- og videocentriske sociale netværk, der ejes af Facebook Instagram forsøgte mandag at finde ud af, hvordan private konta -
 Amazon byder på 60% ejerandel i Indias Flipkart:rapportAmazon har gjort en stor for Indiens online -forhandler Flipkart, sætte det i konkurrence med Walmart om e-handelsdominans Amazon har afgivet et formelt tilbud om at erhverve en kontrollerende and
Amazon byder på 60% ejerandel i Indias Flipkart:rapportAmazon har gjort en stor for Indiens online -forhandler Flipkart, sætte det i konkurrence med Walmart om e-handelsdominans Amazon har afgivet et formelt tilbud om at erhverve en kontrollerende and -
 Undersøgelse viser, at sociale medier og søgemaskiner er bedre, end deres omdømme antyderKredit:CC0 Public Domain Digitale medier har fundamentalt ændret den måde, vi forbruger nyheder på. Det antages ofte, at brugen af sociale netværk og søgemaskiner har haft en negativ indvirkning
Undersøgelse viser, at sociale medier og søgemaskiner er bedre, end deres omdømme antyderKredit:CC0 Public Domain Digitale medier har fundamentalt ændret den måde, vi forbruger nyheder på. Det antages ofte, at brugen af sociale netværk og søgemaskiner har haft en negativ indvirkning -
 Disney+ har sine klassikere, plus Marvel og Star Wars, men ingen R-ratede film, lidt bingeingKredit:CC0 Public Domain Virksomheden, der fik sin berømmelse fra en stille tegneserie -kort fra 1928 med en animeret mus, satser banken på en ny streaming -fremtid med Disney+, som lanceres tirsd
Disney+ har sine klassikere, plus Marvel og Star Wars, men ingen R-ratede film, lidt bingeingKredit:CC0 Public Domain Virksomheden, der fik sin berømmelse fra en stille tegneserie -kort fra 1928 med en animeret mus, satser banken på en ny streaming -fremtid med Disney+, som lanceres tirsd