


En fortolkelig model til at forudsige de sekventielle bevægelser af interagerende agenter
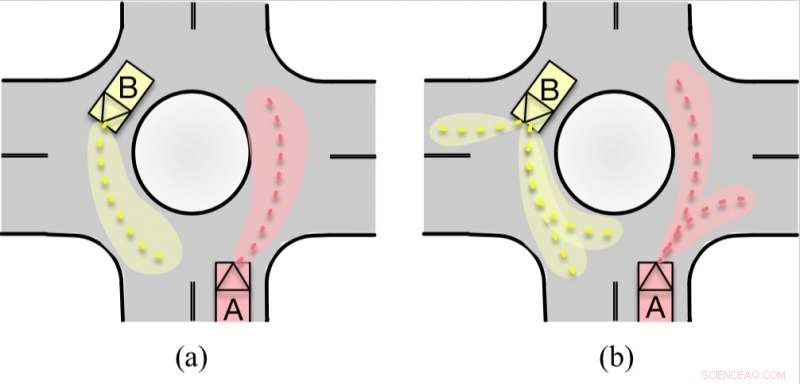
Demonstrationer af (a) single-modal og (b) multi-modal forudsagte distributioner. Kredit:Hu, Zhan &Tomizuka.
Forskere ved University of California (UC), Berkeley, for nylig har udviklet en generativ model, der kan forudsige de sekventielle bevægelser af par af interagerende midler, herunder selvkørende køretøjer samt køretøjer med menneskelige chauffører. Deres metode, skitseret i et papir, der på forhånd blev offentliggjort på arXiv, er fortolkelig, hvilket betyder, at det kan forklare logikken bag sine forudsigelser, hvilket fører til større pålidelighed og generaliserbarhed.
"For at autonome agenter kan fungere med succes i den virkelige verden, evnen til at forudse fremtidige bevægelser for omgivende enheder i scenen kan i høj grad forbedre deres sikkerhedsniveauer, tillader dem at undgå farlige situationer på forhånd, "Yeping Hu, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore.
Tidligere undersøgelser har opnået bemærkelsesværdige resultater med at forudsige adfærden hos individuelle agenter eller køretøjer. Ifølge Hu og hendes kolleger, imidlertid, betragtning af disse midler individuelt ofte er uhjælpsom og begrænsende, som i den virkelige verden (f.eks. på landevejen), disse midler interagerer typisk med hinanden, og deres tilstande er derfor koblet. I øvrigt, når den forudsagte horisont udvides, modellering af forudsigelsesusikkerheder og multimodale fordelinger for fremtidige sekvenser bliver stadig mere udfordrende.
"I vores undersøgelse, vi tog fat på denne udfordring ved at præsentere en multimodal probabilistisk forudsigelsesmetode, "Hu sagde." Den foreslåede metode er baseret på en generativ model og er i stand til i fællesskab at forudsige sekventielle bevægelser for hvert par interagerende midler. "
Som forklaret af Wei Zhan, en anden forsker involveret i undersøgelsen, denne fælles forudsigelse muliggør i sidste ende reaktionsforudsigelse af andre agenters bevægelser. Det kan give et svar på "hvad nu hvis" spørgsmål, f.eks. "Hvad ville andres mulige reaktioner være, hvis værtsautonome køretøj foretager en bestemt handling i fremtiden?" Reaktionsforudsigelse er ekstremt vigtig for selvkørende biler i stærkt interaktive kørescenarier.
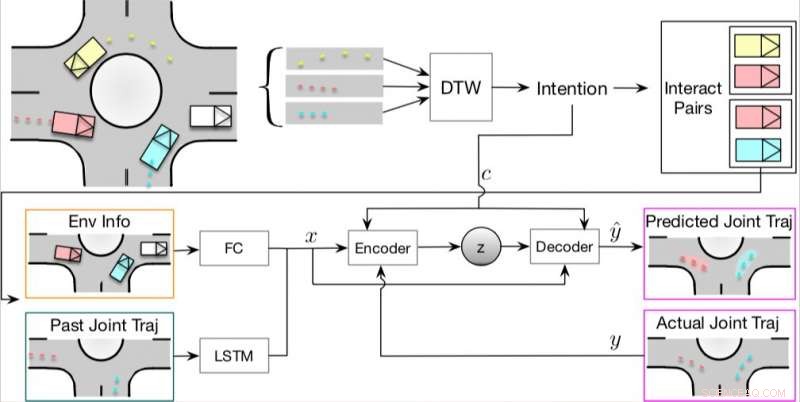
(a) Den overordnede struktur for den foreslåede metode. (b) Kort over rundkørsler over alle referencestier. Kredit:Hu, Zhan &Tomizuka.
Modellen udviklet af Hu og hendes kolleger er baseret på en nøglealgoritme, som har en lignende struktur som traditionelle varianteringsautoencodere (VAE'er). I deres undersøgelse, forskerne brugte deres model til at forudsige den interaktive adfærd mellem to køretøjer, kaldet A og B.
"Multimodalitet kan ses i både diskrete og kontinuerlige aspekter, "Forklarede Hu." Der kan være mange diskrete, intentioner på højt niveau, der er fastlagt i et menneskes sind, f.eks. drej til venstre/højre eller afkørsel ved en bestemt bane i rundkørselsscenariet. Også, under hver hensigt, der eksisterer flere kontinuerlige interaktioner såsom forskellige grader af pass/yield adfærd. Derfor, det er nødvendigt at tage fat på multimodaliteten, når vi forudsiger andre køretøjers fremtidige adfærd, hvilket kan føre os til mere præcise og rimelige forudsigelsesresultater. "
Virkelige bevægelsesdata i stærkt interaktive kørescenarier er det vigtigste aktiv og forudsætning for adfærds- og bevægelsesforudsigelsesforskning. Forskerne brugte en kompleks 7-vejs rundkørsel med tung trafik til at indsamle store mængder meget interaktive bevægelsesdata.
De data, de indsamlede, blev brugt til at træne og evaluere den foreslåede model, giver meget lovende resultater. Deres tilgang overgik bedre end tre alternative modeller, der normalt bruges til at forudsige bevægelse af autonome agenter, nemlig betinget VAE, multilayer perceptron (MLP) ensemble og Monte Carlo (MC) frafald. I fremtiden, deres laboratorium vil også offentliggøre et mere omfattende bevægelsesdatasæt.
"I vores seneste arbejde, vi viste den underliggende begrundelse for prøveudtagningsprocessen af de forudsagte resultater, "Sagde Hu." Selvom der stadig er lang vej til at forstå disse black-box-algoritmer fuldt ud (dvs. neurale netværk), vi forsøgte at give nogle meningsfulde oplysninger om sådan en black-box algoritme og forsøgte at gøre den foreslåede algoritme sikker at bruge. Hvis disse forudsigelsesalgoritmer en dag skal bruges i rigtige autonome køretøjer, tilstrækkelig begrundelse bag forudsigelsesalgoritmen vil helt sikkert være nødvendig. "
Den model, Hu og hendes kolleger har udtænkt, kan bidrage til at øge sikkerheden ved autonome køretøjer, giver dem mulighed for at forudsige interaktioner mellem andre køretøjer på vejen. I hendes næste studier, Hu planlægger at behandle sikkerhedssiden af forudsigelsesalgoritmen yderligere, samtidig med at man prøver at gøre forudsigelsesprocessen mere gennemsigtig.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Elektronisk handske giver robotter en følelse af berøringStanford-forskere udviklede den hudlignende sensor på fingerspidsen af denne robothånd, og programmerede den til at røre frugten uden skader. En dag håber de at oprette kontrolsystemer, der gør det
Elektronisk handske giver robotter en følelse af berøringStanford-forskere udviklede den hudlignende sensor på fingerspidsen af denne robothånd, og programmerede den til at røre frugten uden skader. En dag håber de at oprette kontrolsystemer, der gør det -
 Indiens forsvarswebsted hacket, tre andre regeringshjemmesider nedeStore indiske regeringsafdelingers websteder blev rapporteret enten utilgængelige eller ikke fundet Indiens forsvarsminister sagde, at ministeriets hjemmeside blev hacket fredag, med webportalerne
Indiens forsvarswebsted hacket, tre andre regeringshjemmesider nedeStore indiske regeringsafdelingers websteder blev rapporteret enten utilgængelige eller ikke fundet Indiens forsvarsminister sagde, at ministeriets hjemmeside blev hacket fredag, med webportalerne -
 Volkswagen skal bygge elbiler på fabrikken i TennesseeDr. Herbert Diess, DIREKTØR, Volkswagen AG, venstre, ser Bill Haslam, Guvernør i Tennessee viser sin trøje under mediernes forhåndsvisninger til North American International Auto Show i Detroit, Manda
Volkswagen skal bygge elbiler på fabrikken i TennesseeDr. Herbert Diess, DIREKTØR, Volkswagen AG, venstre, ser Bill Haslam, Guvernør i Tennessee viser sin trøje under mediernes forhåndsvisninger til North American International Auto Show i Detroit, Manda -
 Tweaking-værktøjer til at spore tweets over tidXiangliangs dynamiske beregningsmodeller kan analysere tweets for at identificere Twitter-brugeres interesser. Kredit:KAUST Dine indlæg på sociale medier afslører meget om dig. KAUST -forskere har
Tweaking-værktøjer til at spore tweets over tidXiangliangs dynamiske beregningsmodeller kan analysere tweets for at identificere Twitter-brugeres interesser. Kredit:KAUST Dine indlæg på sociale medier afslører meget om dig. KAUST -forskere har
- Biosfæren 2 regnskov lukket under tørkeeksperiment
- 2. styrt fornyer sikkerhedsbekymringerne for Boeings prisbelønnede nye jetfly
- Nye globale økonomiske udsigter optimistiske, men wild cards kunne sende tingene i spiral
- Små bobler tager et kvantespring
- Kan biologisk nedbrydelige forurenende stoffer forårsage miljøproblemer?
- NASA -kommunikationsnetværk til dobbelt rumstations datahastigheder