


En simpel teknik gør det muligt for robotter at genkende berøring og nærhed
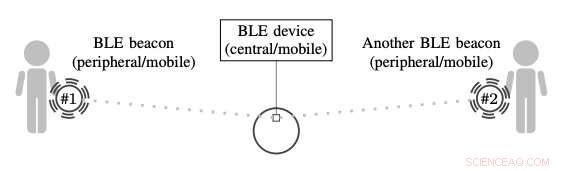
Dette tal viser det overordnede eksperimentelle setup. En central BLE -enhed bruges til passivt at scanne efter reklamer for perifere BLE -enheder. Folk kan være udstyret med en eller flere reklame BLE -enheder. Den centrale enhed beregner pakker med RSS -data og ID for modtagne reklamer. Disse pakker leveres via en kabelforbundet forbindelse til et andet system på robotens bord eller trådløst via Bluetooth -forbindelse til en anden maskine. Da forskerne ikke har adgang til robotens tavle, de brugte bluetooth -forbindelsen, hvilket gav ekstra latenstid. Kredit:Scheunemann et al.
Forskere ved University of Hertfordshire har for nylig foreslået en let og konfigurerbar teknik, der forbedrer en robots evne til at opfatte og interagere med mennesker i omgivelserne. Deres teknik, præsenteret i et papir, der på forhånd er offentliggjort på arXiv, bruger overkommelige Bluetooth low energy (BLE) -enheder. Blandt de mange mulige applikationer, det kan forbedre terapien til børn med autismespektrumforstyrrelse (ASD), tillader robotter at fungere som mæglere og overvåge børn i deres omgivelser.
"Jeg er interesseret i robotter, der kan interagere fuldstændigt autonomt uden ekstern kontrol og uden en ekstern computer, "Marcus M. Scheunemann, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Jeg startede mit arbejde på University of Hertfordshire for at udvikle robotter, der kan være mæglere under terapi for børn med autisme."
At udvikle robotter, der præcist kan genkende nærheden til og mellem børn, er en betydeligt udfordrende opgave. Det skyldes, at børn generelt er ret spontane i deres beslutningsprocesser, derfor, de kan bevæge sig meget og løbende ændre deres interaktionsstile. Dette gør det sværere for robotter at spore børn ved hjælp af traditionelle metoder såsom kameraer eller sensorer, især hvis en robot er mobil og har lidt beregningskraft.
De fleste eksterne sporingsenheder, der sender nærhedsoplysninger til robotter, har brug for mindst tre markører for at blive placeret på børn. Ud over, for at fungere korrekt skal de hele tiden være udvendigt slidt og permanent synlige.
Selvom oplysningerne fra mange eksisterende sporingsenheder typisk er nøjagtige, disse enheder kan være vanskelige at anvende på børn og begrænser typisk deres bevægelser til et enkelt udstyret rum. For at overvinde begrænsningerne ved eksisterende metoder, Scheunemann og hans kolleger udviklede en ny teknik, der gør det muligt for robotter at genkende berøring og nærhed til andre mennesker ved hjælp af BLE -enheder.
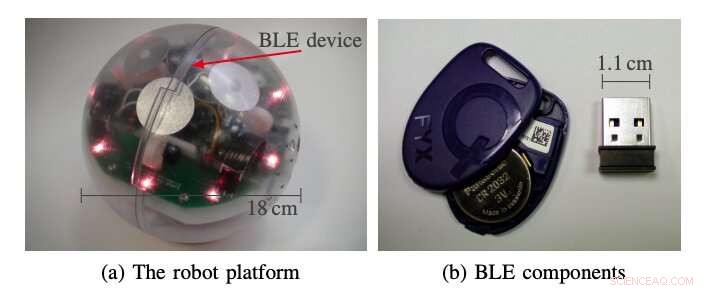
(a) Den mobile robotplatform QueBall kan bevæge sig frem og tilbage og vippe til venstre/højre. Det kan også udsende lyd og farver og registrerer berøring. Forskerne udviklede ikke denne robot; de brugte det bare som et eksempel. (b) Et selvdrevet og konfigurerbart reklamebelysning, der er beregnet til at blive fastgjort til personer (til venstre) og en central Bluetooth-enhed, eller BLE -scanner, det er udstyret med robotten til at scanne sine omgivelser for styrken af perifere signaler (højre). Kredit:Scheunemann et al.
"Brug af BLE er en overkommelig måde at omgå problemerne med eksisterende sporingsteknikker, "Sagde Scheunemann." Når et barn bærer mindst ét BLE -fyrtårn, en robot kan måle signalstyrken og udlede viden om, hvilket barn der interagerer på et givet tidspunkt, eller når det bliver rørt. Fyret kan være på størrelse med et møntcellebatteri og kan placeres i tøj eller hætter, uden at være synlig udefra, i modsætning til eksterne sporingsenheder. "
Den teknik, Scheunemann og hans kolleger har udviklet, kræver ikke et kamera og kan hurtigt beregne alle oplysninger ombord. Ud over, i modsætning til andre sporingsenheder, BLE-enhederne, som forskerne bruger, er billige og kan let købes på hylden.
For at teste deres teknik, forskerne udførte tre proof-of-concept-eksperimenter i et støjende laboratorium med en mobil sfærisk robot kaldet QueBall. Først, de brugte deres teknik til at forbedre robotens evne til at udlede oplysninger om individers nærhed i dets omgivende miljø.
I et andet forsøg, Scheunemann og hans kolleger brugte BLE -enhederne som berøringssensorer, giver QueBall mulighed for at genkende, hvornår den blev rørt. Endelig, de brugte deres teknik til at sætte robotten i stand til at skelne mellem forskellige interagerende individer.
"Den teknik, vi foreslår, gør det enkelt at have en robot som mægler til autistisk børneterapi, "Sagde Scheunemann." Ved hjælp af vores metode, en robot kan udlede nærhedsoplysninger om et givet barn, uden behov for at kalibrere et kamera til miljøet eller til ændringer i miljøet. Denne teknologi kan også skaleres til andre human-robot-interaktionsscenarier, hvor der er behov for nærhedsoplysninger til et menneske. "
I deres evalueringer, Scheunemann og hans kolleger fandt ud af, at observation af den rå modtagne signalstyrke (RSS) mellem forskellige BLE -enheder forbedrede en robots interaktioner med mennesker betydeligt. I fremtiden, deres teknik kunne fremme mere adaptiv adfærd i robotter, der opererer i forskellige indstillinger. For eksempel, det kunne lette ansættelsen af robotter som terapimæglere for børn med ASD.
"I vores fremtidige arbejde, vi planlægger at bruge denne teknologi til at udstyre robotter med BLE -scannere, så de let kan udlede oplysninger relateret til nærheden til og mellem interagerende mennesker. "
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Amazon taler for at regulere ansigtsgenkendelsesteknologiAmazon har sluttet sig til rækken af andre teknologivirksomheder, inklusive Microsoft og Google, ved at anerkende risiciene ved ansigtsgenkendelsessoftware og opfordre den føderale regering til at i
Amazon taler for at regulere ansigtsgenkendelsesteknologiAmazon har sluttet sig til rækken af andre teknologivirksomheder, inklusive Microsoft og Google, ved at anerkende risiciene ved ansigtsgenkendelsessoftware og opfordre den føderale regering til at i -
 Vender siden:Japans sidste personsøger-service slutter efter 50 årPersonsøgere var i højsædet i 90erne i Japan Enden på personsøger-æraen er tæt på i Japan efter fem årtier, da landets sidste udbyder mandag meddelte, at den ville skrotte sin service næste år. T
Vender siden:Japans sidste personsøger-service slutter efter 50 årPersonsøgere var i højsædet i 90erne i Japan Enden på personsøger-æraen er tæt på i Japan efter fem årtier, da landets sidste udbyder mandag meddelte, at den ville skrotte sin service næste år. T -
 Facebook:Var bedre til at kontrollere nøgenhed end hadefulde ytringerI denne 16. maj, 2012, fil foto, Facebook-logoet vises på en iPad i Philadelphia. Facebook mener, at dets politisystem er bedre til at skrubbe grafisk vold, umotiveret nøgenhed og terrorpropaganda fra
Facebook:Var bedre til at kontrollere nøgenhed end hadefulde ytringerI denne 16. maj, 2012, fil foto, Facebook-logoet vises på en iPad i Philadelphia. Facebook mener, at dets politisystem er bedre til at skrubbe grafisk vold, umotiveret nøgenhed og terrorpropaganda fra -
 Facebook fanget i en valgsikkerhed Catch-22I denne 1. maj 2018, fil foto Facebooks administrerende direktør Mark Zuckerberg holder hovedtalen på F8, Facebooks udviklerkonference i San Jose, Calif. Facebook Inc. rapporterer indtjening tirsdag,
Facebook fanget i en valgsikkerhed Catch-22I denne 1. maj 2018, fil foto Facebooks administrerende direktør Mark Zuckerberg holder hovedtalen på F8, Facebooks udviklerkonference i San Jose, Calif. Facebook Inc. rapporterer indtjening tirsdag,
- Salget på Black Friday i USA ramte rekord på 7,4 mia
- Kinas krig mod forurening viser lovende resultater, undersøgelse finder
- Sådan finder du fingeraftryk med et sort lys
- Opfindelse kan forbedre levering af kræftmedicin, reducere skadelige virkninger af kemoterapi
- Havniveaustigning truer arkæologiske og historiske steder
- Kontrol af vandkvaliteten ved hanen