


Hjælper robotter med at huske:Hyperdimensionel computarteori kan ændre måden AI fungerer på
Forskernes laboratorium, set af den dynamiske synsføler. Kredit:Perception and Robotics Group, University of Maryland.
Houston Astros 'José Altuve træder op til tallerkenen med 3-2, studerer kanden og situationen, får klarsignal fra tredje base, sporer boldens frigivelse, svinger ... og får en single op på midten. Bare endnu en tur til tallerkenen for den tre gange amerikanske ligamester i slag.
Kan en robot få et hit i den samme situation? Ikke sandsynligt.
Altuve har finpudset naturlige reflekser, års erfaring, kendskab til kandens tendenser, og en forståelse af banernes forskellige baner. Hvad han ser, hører, og føles problemfrit kombineret med sin hjerne og muskelhukommelse for at sætte gang i den svingning, der producerer hittet. Robotten, på den anden side, har brug for et koblingssystem til langsomt at koordinere data fra sine sensorer med dets motoriske evner. Og det kan ikke huske noget. Strike tre!
Men der kan være håb for robotten. Et papir af forskere fra University of Maryland, der netop er offentliggjort i tidsskriftet Science Robotics introducerer en ny måde at kombinere opfattelse og motoriske kommandoer ved hjælp af den såkaldte hyperdimensionelle beregningsteori, som fundamentalt kunne ændre og forbedre den grundlæggende kunstige intelligens (AI) opgave for sensorimotorisk repræsentation - hvordan agenter som robotter oversætter, hvad de fornemmer, til hvad de gør.
"Learning Sensorimotor Control with Neuromorphic Sensors:Toward Hyperdimensional Active Perception" blev skrevet af datalogi Ph.D. eleverne Anton Mitrokhin og Peter Sutor, Jr.; Cornelia Fermüller, en associeret forsker ved University of Maryland Institute for Advanced Computer Studies; og professor i datalogi Yiannis Aloimonos. Mitrokhin og Sutor rådes af Aloimonos.
Integration er den vigtigste udfordring inden for robotteknologi. En robotsensorer og aktuatorerne, der bevæger den, er separate systemer, forbundet med en central læringsmekanisme, der udleder en nødvendig handling givet sensordata, eller omvendt.
Det besværlige tredelte AI-system-hver del taler sit eget sprog-er en langsom måde at få robotter til at udføre sensorimotoriske opgaver. Det næste trin inden for robotik vil være at integrere en robots opfattelser med dets motoriske evner. Denne fusion, kendt som "aktiv opfattelse, "ville give robotten en mere effektiv og hurtigere måde at udføre opgaver på.
I forfatternes nye computingteori, en robots operativsystem ville være baseret på hyperdimensionale binære vektorer (HBV'er), som findes i et sparsomt og ekstremt højdimensionelt rum. HBV'er kan repræsentere forskellige diskrete ting - f.eks. et enkelt billede, et koncept, en lyd eller en instruktion; sekvenser bestående af diskrete ting; og grupperinger af diskrete ting og sekvenser. De kan redegøre for alle disse typer oplysninger på en meningsfuldt konstrueret måde, binder hver modalitet sammen i lange vektorer på 1'er og 0'er med samme dimension. I dette system, handlemuligheder, sensorisk input og andre oplysninger optager samme plads, er på samme sprog, og er smeltet sammen, skabe en slags hukommelse til robotten.
Det Science Robotics papir markerer første gang, at opfattelse og handling er blevet integreret.
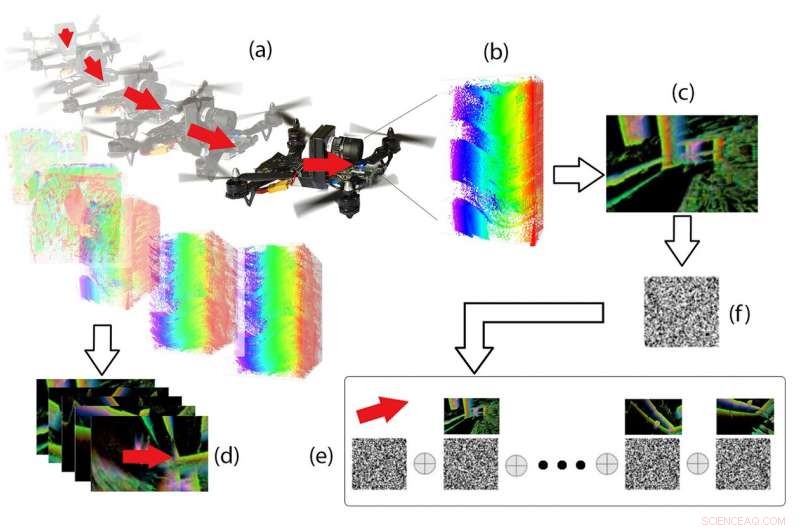
Hyperdimensionel pipeline. Fra begivenhedsdata (b) optaget på DVS under droneflyvning (a), "Hændelsesbilleder" (c) og 3D -bevægelsesvektorer (d) beregnes, og begge er kodet som binære vektorer og kombineret i hukommelsen via specielle vektoroperationer (e). I betragtning af et nyt begivenhedsbillede (f), den tilhørende 3D -bevægelse kan hentes tilbage fra hukommelsen. Kredit:Perception and Robotics Group, University of Maryland.
En hyperdimensionel ramme kan forvandle enhver sekvens af "øjeblikkelige" til nye HBV'er, og gruppere eksisterende HBV'er sammen, alle i samme vektorgængde. Dette er en naturlig måde at skabe semantisk betydningsfulde og informerede "minder" på. Kodningen af flere og flere oplysninger fører igen til "historie" -vektorer og evnen til at huske. Signaler bliver vektorer, indeksering oversættes til hukommelse, og læring sker gennem klynger.
Robotens minder om, hvad den har fornemmet og gjort tidligere, kan få den til at forvente fremtidig opfattelse og påvirke dens fremtidige handlinger. Denne aktive opfattelse ville gøre robotten i stand til at blive mere autonom og bedre i stand til at udføre opgaver.
"En aktiv sanser ved, hvorfor den ønsker at fornemme, vælger derefter, hvad der skal opfattes, og bestemmer hvordan, hvornår og hvor man skal opnå opfattelsen, "siger Aloimonos." Det vælger og fixerer på scener, øjeblikke i tiden, og afsnit. Derefter tilpasser den sine mekanismer, sensorer, og andre komponenter til at handle på det, den vil se, og vælger synspunkter, hvorfra man bedst kan fange, hvad den har til hensigt. "
"Vores hyperdimensionale ramme kan håndtere hvert af disse mål."
Anvendelser af Maryland -forskningen kan strække sig langt ud over robotik. Det ultimative mål er at kunne lave AI selv på en fundamentalt anderledes måde:fra begreber til signaler til sprog. Hyperdimensionel computing kunne give en hurtigere og mere effektiv alternativ model til de iterative neurale net- og dybe lærings -AI -metoder, der i øjeblikket bruges i computerapplikationer, såsom datamining, visuel genkendelse og oversættelse af billeder til tekst.
"Neurale netværksbaserede AI-metoder er store og langsomme, fordi de ikke kan huske, "siger Mitrokhin." Vores hyperdimensionelle teorimetode kan skabe minder, hvilket vil kræve meget mindre beregning, og burde gøre sådanne opgaver meget hurtigere og mere effektive. "
Bedre bevægelsesregistrering er en af de vigtigste forbedringer, der er nødvendige for at integrere en robots sansning med dens handlinger. Brug af en dynamisk synsføler (DVS) i stedet for konventionelle kameraer til denne opgave har været en nøglekomponent i test af den hyperdimensionelle computarteori.
Digitale kameraer og computervisionsteknikker fanger scener baseret på pixels og intensiteter i rammer, der kun findes "i øjeblikket". De repræsenterer ikke bevægelse godt, fordi bevægelse er en kontinuerlig enhed.
En DVS fungerer anderledes. Det "tager ikke billeder" i sædvanlig forstand, men viser en anden konstruktion af virkeligheden, der er tilpasset formålene med robotter, der skal adressere bevægelse. Det fanger ideen om at se bevægelse, især kanterne på genstande, når de bevæger sig. Også kendt som en "silicium nethinde, "Denne sensor, der er inspireret af pattedyrssyn, registrerer asynkront ændringer i belysningen, der forekommer ved hver DVS -pixel. Sensoren rummer en lang række lysforhold, fra mørkt til lyst, og kan løse meget hurtig bevægelse med lav latens-ideelle egenskaber til realtidsapplikationer inden for robotik, såsom autonom navigation. De data, det akkumulerer, er meget bedre egnet til det integrerede miljø i den hyperdimensionale computarteori.
En DVS registrerer en kontinuerlig strøm af begivenheder, hvor en hændelse genereres, når en individuel pixel registrerer en bestemt foruddefineret ændring i logaritmen for lysintensiteten. Dette opnås ved analog kredsløb, der er integreret på hver pixel, og hver begivenhed rapporteres med sin pixelplacering og tidsstempel for mikrosekundnøjagtighed.
"Dataene fra denne sensor, begivenhedsskyerne, er meget sparsommere end sekvenser af billeder, "siger Cornelia Fermüller, en af forfatterne til Science Robotics -papiret. "Desuden, begivenhedsskyerne indeholder de vigtige oplysninger til kodning af rum og bevægelse, konceptuelt konturerne i scenen og deres bevægelse. "
Udsnit af hændelsesskyer er kodet som binære vektorer. Dette gør DVS til et godt værktøj til implementering af teorien om hyperdimensionel computing til fusion af opfattelse med motoriske evner.
En DVS ser sparsomme begivenheder i tide, at give tæt information om ændringer i en scene, og giver mulighed for nøjagtige, hurtig og sparsom opfattelse af de dynamiske aspekter af verden. Det er en asynkron differentialsensor, hvor hver pixel fungerer som et fuldstændigt uafhængigt kredsløb, der sporer lysets intensitetsændringer. Når detektering af bevægelse virkelig er den slags syn, der er nødvendig, DVS er det foretrukne værktøj.
Sidste artikelVirtual reality -spil simulerer oplevelser med race
Næste artikelDen kriseramte Nissan ryster om bord, holder chef
 Varme artikler
Varme artikler
-
 Salget af elbiler blev tredoblet sidste år. Her er hvad vi kan gøre for at holde dem i vækstKredit:CC0 Public Domain I alt blev der solgt 6718 elbiler i Australien i 2019. Det er tre gange så mange som i 2018, men det er stadig en lille øl. Mere end en million fossildrevne lette køretøje
Salget af elbiler blev tredoblet sidste år. Her er hvad vi kan gøre for at holde dem i vækstKredit:CC0 Public Domain I alt blev der solgt 6718 elbiler i Australien i 2019. Det er tre gange så mange som i 2018, men det er stadig en lille øl. Mere end en million fossildrevne lette køretøje -
 Facebook tilslutter blomstrende forretningsversion til PortalFacebook sagde, at det nu har tre millioner betalte brugere på sin Workplace -platform, et separat socialt netværk for virksomheder Facebook sagde tirsdag, at dens Portal -smartskærme ville blive
Facebook tilslutter blomstrende forretningsversion til PortalFacebook sagde, at det nu har tre millioner betalte brugere på sin Workplace -platform, et separat socialt netværk for virksomheder Facebook sagde tirsdag, at dens Portal -smartskærme ville blive -
 Seks regler for forbedring af bybustjenesterSmart busbrug kan transformere offentlig transport i byer, som EMBARQ gør i Brasilien. Kredit:EMBARQ Brasil/Flickr, CC BY-NC Offentlig transport, der er sikker, effektivt og effektivt er en kernep
Seks regler for forbedring af bybustjenesterSmart busbrug kan transformere offentlig transport i byer, som EMBARQ gør i Brasilien. Kredit:EMBARQ Brasil/Flickr, CC BY-NC Offentlig transport, der er sikker, effektivt og effektivt er en kernep -
 Viruslockdowns sender det europæiske bilsalg ned med 55 %Window shopping var alt, hvad de fleste europæiske forbrugere kunne gøre i sidste måned, da ikke-essentielle virksomheder er blevet lukket for at dæmme op for spredningen af den nye coronavirus, før
Viruslockdowns sender det europæiske bilsalg ned med 55 %Window shopping var alt, hvad de fleste europæiske forbrugere kunne gøre i sidste måned, da ikke-essentielle virksomheder er blevet lukket for at dæmme op for spredningen af den nye coronavirus, før
- Begrænsning af udvinding af fossile brændstoffer for at holde den globale opvarmning under 1,5°C-…
- Ny undersøgelse afslører indsigt i naturen af den ultraviolet-lyse stjerne Barnard 29
- Mars Madness forudsigelser: Statistikker, der hjælper dig med at udfylde en vindende beslag
- Et spring fremad med hensyn til at estimere afgrødernes vandforbrug
- Tesla 2019-salget ramte mål, stige over 50 % i forhold til året før
- Brug af kuldioxidaffald til at adskille metaller fra malme