


En social opfattelsesordning til adfærdsplanlægning af autonome biler
Kredit:Sun et al.
For at navigere i dynamiske miljøer, autonome køretøjer (AV'er) bør være i stand til at behandle alle tilgængelige oplysninger og bruge dem til at generere effektive kørestrategier. Forskere ved University of California, Berkeley, har for nylig foreslået en social opfattelsesordning til planlægning af autonome bilers adfærd, som kunne være med til at udvikle AV'er, der er bedre rustet til at håndtere usikkerhed i deres omgivende miljø.
"Min forskning har fokuseret på, hvordan man designer menneskelignende køreadfærd til autonome biler, "Lysende sol, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Vores mål er at bygge AV'er, der ikke kun forstår menneskelig adfærd, men også udføre på en lignende måde i flere aspekter, herunder opfattelse, ræsonnement og handling."
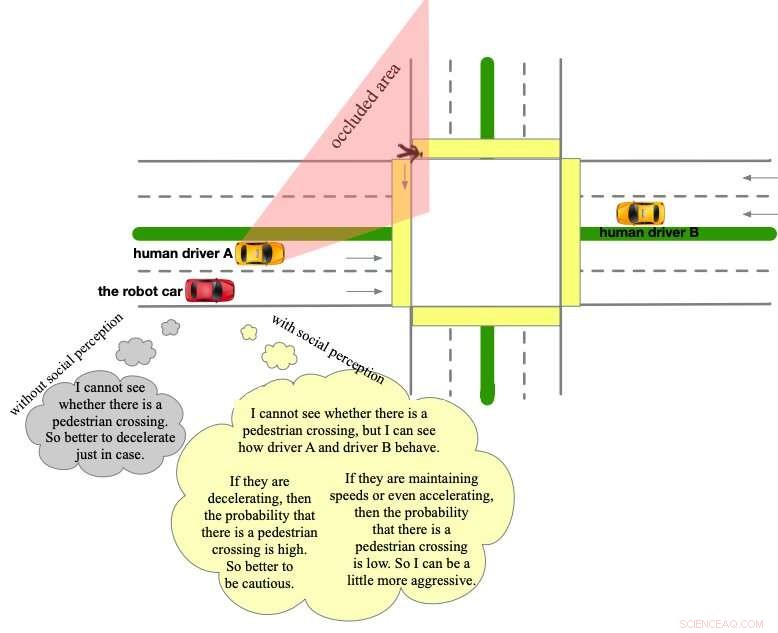
Sun og hendes kolleger observerede, at menneskelige chauffører har en tendens til at behandle andre køretøjer som dynamiske forhindringer, ofte udlede yderligere information fra deres adfærd på vejen. Disse oplysninger er generelt okkluderede miljøoplysninger eller fysisk uopdagelige sociale oplysninger.
"Det ville være meget vigtigt og gavnligt for AV'er at opføre sig på samme måde, da dette ville gøre dem mere intelligente, mere menneskelignende og i sidste ende sikrere, " sagde Sun. "I dette arbejde, vi lader AV'er behandle alle andre vejdeltagere som dynamiske og distribuerede sensorer."
Den sociale opfattelsesordning, der er foreslået af Sun og hendes kolleger, behandler i det væsentlige alle køretøjer og forhindringer på vejen som sensorer fordelt i et sensornetværk. Dette gør det muligt for AV'er at observere både individuel adfærd og gruppeadfærd, ved at bruge deres observationer til ensartet at opdatere forskellige typer usikkerheder inden for et "belief space". Ordningen fokuserer især på fysiske tilstandsusikkerheder (f.eks. forårsaget af okklusioner eller begrænset sensorrækkevidde) og sociale adfærdsmæssige usikkerheder (f.eks. lokale kørselspræferencer).
Ordningen integrerer derefter opdaterede sociale opfattelser med en sandsynlig planlægningsramme baseret på modelprædiktiv kontrol (MPC), hvis omkostningsfunktion læres via invers forstærkningslæring (IRL). Denne kombination mellem et probabilistisk planlægningsmodul og socialt forbedret opfattelse gør det muligt for køretøjerne at generere defensiv adfærd, der er socialt kompatibel og dermed ikke alt for streng.
"Ved at observere andres adfærd og sammenligne dem med tidligere adfærdsmodeller, AV'er kan ræsonnere om mulige tilstande for de uopdagelige variabler ved kun at bruge sine egne sensorer, " sagde Sun. "Dette kan hjælpe AV'erne med at reducere perceptionsusikkerheder, ligesom mennesker gør. Sammenlignet med andre eksisterende tilgange, ideen i dette arbejde udvider effektivt AV'ernes perceptionsevne uden yderligere hardware, og kan bidrage til at skabe sikrere og mere effektive manøvrer."
Sun og hendes kolleger evaluerede deres rammer i en række simuleringer med repræsentative scenarier med sensorokklusioner. De fandt ud af, at ved at efterligne menneskers sociale opfattelsesmekanismer, perceptionsmodulet opdagede færre usikkerheder, i sidste ende generere sikrere og mere effektiv AV-adfærd via en ikke-konservativ forsvarsplanlægger.
"Praktisk set, denne gode funktion kan gøre AV'er mere effektive ved tilstedeværelse af okklusioner, samt mere tilpasningsdygtige i nye køremiljøer, fordi de hurtigt kan udlede og lære om den fysisk uopdagelige sociale information i deres omgivelser, " forklarede Sun.
I fremtiden, den sociale opfattelsesordning, som dette team af forskere har udarbejdet, kunne være med til at danne grundlag for udviklingen af selvkørende biler, der kan navigere i konstant skiftende miljøer mere effektivt. Sun og hendes kolleger planlægger nu at udvikle deres rammer yderligere, ændre nogle af dens antagelser og gøre det nemmere at anvende i virkelige situationer.
"For at udlede yderligere usikker information fra andre vejdeltageres adfærd, AV'er bør være udstyret med tidligere adfærdsmodeller, der kan tilnærme andres faktiske adfærd, " Sun forklarede. "I det nuværende arbejde, vi antager, at alle andre vejdeltagere er rationelle optimerere og tilnærmer deres adfærdsgenereringsmodeller via belønningsfunktioner. I vores fremtidige arbejde, vi vil slække på antagelsen om rationalitet for at gøre tilnærmelsen mere praktisk."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Europa bøder Google 1,7 milliarder dollars i kartelsag (opdatering)EUs konkurrencekommissær Margrethe Vestager taler under en mediekonference i EUs hovedkvarter i Bruxelles. Onsdag, 20. marts 2019. EU-tilsynsmyndigheder har ramt Google med en bøde på 1,49 milliarder
Europa bøder Google 1,7 milliarder dollars i kartelsag (opdatering)EUs konkurrencekommissær Margrethe Vestager taler under en mediekonference i EUs hovedkvarter i Bruxelles. Onsdag, 20. marts 2019. EU-tilsynsmyndigheder har ramt Google med en bøde på 1,49 milliarder -
 Apple afslører premium iPhone XS, sundhedsfunktioner til ur (opdatering)Apple har afsløret et nydesignet smartwatch Apple afslørede onsdag tre nye iPhones i et forsøg på at styrke sin plads på premium smartphone-markedet. sammen med et opgraderet smartwatch, der tager
Apple afslører premium iPhone XS, sundhedsfunktioner til ur (opdatering)Apple har afsløret et nydesignet smartwatch Apple afslørede onsdag tre nye iPhones i et forsøg på at styrke sin plads på premium smartphone-markedet. sammen med et opgraderet smartwatch, der tager -
 Robotter læser følelserWoody, en billig social robot, læser følelserne på menneskets ansigt, baseret på algoritmerne, der er udviklet af forsker Kiju Lee og hendes team ved Case Western Reserve University. Kredit:Case Weste
Robotter læser følelserWoody, en billig social robot, læser følelserne på menneskets ansigt, baseret på algoritmerne, der er udviklet af forsker Kiju Lee og hendes team ved Case Western Reserve University. Kredit:Case Weste -
 Pentagon vedtager nye mobiltelefonrestriktionerI denne 3. juni, 2011, fil foto, Pentagon ses fra luft fra Air Force One. Forsvarsministeriet har godkendt nye restriktioner for brugen af mobiltelefoner og nogle andre elektroniske enheder i Pentag
Pentagon vedtager nye mobiltelefonrestriktionerI denne 3. juni, 2011, fil foto, Pentagon ses fra luft fra Air Force One. Forsvarsministeriet har godkendt nye restriktioner for brugen af mobiltelefoner og nogle andre elektroniske enheder i Pentag
- Hvad laver en taser til kroppen?
- NASA flyver store ubemandede fly i det offentlige luftrum uden jagtfly for første gang
- Hvordan man laver forskel med global opvarmning
- Spormetaller i luften giver store stænk på livet under havet
- Nogle bærbare Apple-computere er forbudt at flyve med fly på grund af brandfare
- Sådan beregnes volumen og omkreds af en cirkel