


Neural Lander bruger AI til at lande droner jævnt

Nyt system anvender et dybt neuralt netværk til at overvinde udfordringen med jord-effekt turbulens. Kredit:California Institute of Technology
Det er svært at lande droner med flere rotorer jævnt. Kompleks turbulens skabes af luftstrømmen fra hver rotor, der hopper fra jorden, efterhånden som jorden vokser stadig tættere under en nedstigning. Denne turbulens er ikke godt forstået, og den er heller ikke let at kompensere for, især for autonome droner. Derfor er start og landing ofte de to sværeste dele af en droneflyvning. Droner slingrer typisk og bevæger sig langsomt mod en landing, indtil strømmen til sidst afbrydes, og de taber den resterende afstand til jorden.
Hos Caltechs Center for Autonome Systemer og Teknologier (CAST), eksperter i kunstig intelligens er gået sammen med kontroleksperter for at udvikle et system, der bruger et dybt neuralt netværk til at hjælpe autonome droner med at "lære", hvordan de lander mere sikkert og hurtigt, samtidig med at den sluger mindre strøm. Systemet de har skabt, døbt "Neural Lander, "er en læringsbaseret controller, der sporer dronens position og hastighed, og ændrer sin landingsbane og rotorhastighed i overensstemmelse hermed for at opnå den jævnest mulige landing.
"Dette projekt har potentialet til at hjælpe droner med at flyve mere jævnt og sikkert, især i nærvær af uforudsigelige vindstød, og spiser mindre batteristrøm, da droner kan lande hurtigere, " siger Soon-Jo Chung, Bren professor i rumfart i afdelingen for ingeniørvidenskab og anvendt videnskab (EAS) og forsker ved JPL, som Caltech administrerer for NASA. Projektet er et samarbejde mellem Chung og Caltech kunstig intelligens (AI) eksperter Anima Anandkumar, Bren professor i edb og matematiske videnskaber, og Yisong Yue, adjunkt i databehandling og matematiske videnskaber.
Et papir, der beskriver Neural Lander, blev præsenteret på Institute of Electrical and Electronics Engineers (IEEE) International Conference on Robotics and Automation den 22. maj. Medforfattere af papiret er Caltech-kandidatstuderende Guanya Shi, hvis ph.d. forskning er i fællesskab overvåget af Chung og Yue, samt Xichen Shi og Michael O"Connell, hvem er ph.d. studerende i Chungs Aerospace Robotics and Control Group.
Dybe neurale netværk (DNN'er) er AI-systemer, der er inspireret af biologiske systemer som hjernen. Den "dybe" del af navnet refererer til det faktum, at datainput er churnet gennem flere lag, som hver behandler indgående information på en anden måde for at pirre stadig mere komplekse detaljer. DNN'er er i stand til automatisk læring, hvilket gør dem velegnede til gentagne opgaver.
For at sikre, at dronen flyver problemfrit under vejledning af DNN, holdet brugte en teknik kendt som spektral normalisering, som udjævner neuralnettets output, så det ikke laver voldsomt varierende forudsigelser, når input eller betingelser skifter. Forbedringer i landing blev målt ved at undersøge afvigelse fra en idealiseret bane i 3-D rum. Der blev udført tre typer test:en lige lodret landing; en faldende lysbue; og flyvning, hvor dronen skimmer hen over en ødelagt overflade – såsom over kanten af et bord – hvor effekten af turbulens fra jorden ville variere kraftigt.
Det nye system reducerer lodret fejl med 100 procent, giver mulighed for kontrollerede landinger, og reducerer sideafdrift med op til 90 procent. I deres eksperimenter, det nye system opnår faktisk landing i stedet for at sidde fast omkring 10 til 15 centimeter over jorden, som umodificerede konventionelle flyveledere ofte gør. Yderligere, under skimmetesten, Neural Lander producerede en meget jævnere overgang, da dronen gik fra at skumme hen over bordet til at flyve i det frie rum ud over kanten.
"Med mindre fejl, Neural Lander er i stand til en hurtigere, glattere landing og glider glat over jorden, " siger Yue. Det nye system blev testet på CASTs tre etager høje flyveplads, som kan simulere et næsten ubegrænset udvalg af udendørs vindforhold. Åbnede i 2018, CAST er en 10, 000 kvadratmeter anlæg, hvor forskere fra EAS, JPL, og Caltechs afdeling for geologiske og planetariske videnskaber forenes for at skabe den næste generation af autonome systemer, mens vi fremmer områderne for droneforskning, autonom udforskning, og bioinspirerede systemer.
"Denne tværfaglige indsats bringer eksperter fra maskinlæring og kontrolsystemer. Vi er knap begyndt at udforske de rige forbindelser mellem de to områder, " siger Anandkumar.
Udover dets åbenlyse kommercielle anvendelser - Chung og hans kolleger har indgivet patent på det nye system - kan det nye system vise sig at være afgørende for projekter, der i øjeblikket er under udvikling hos CAST, herunder en autonom medicinsk transport, der kunne lande på vanskeligt tilgængelige steder (såsom en fast trafik). "Vigtigheden af at være i stand til at lande hurtigt og gnidningsløst, når man transporterer en skadet person, kan ikke overvurderes, " siger Morteza Gharib, Hans W. Liepmann professor i luftfart og bioinspireret teknik; direktør for CAST; og en af hovedforskerne i luftambulanceprojektet.
Artiklen har titlen "Neural Lander:Stable Drone Landing Control Using Learned Dynamics."
 Varme artikler
Varme artikler
-
 Deepfakes kaldte ny valgtrussel, uden let løsningHouse Intelligence Committee formand Adam Schiff, D-Californien, venstre, hilser vidne Clint Watts, en cybersikkerheds- og efterretningsekspert hos Foreign Policy Research Institute, ved en høring om
Deepfakes kaldte ny valgtrussel, uden let løsningHouse Intelligence Committee formand Adam Schiff, D-Californien, venstre, hilser vidne Clint Watts, en cybersikkerheds- og efterretningsekspert hos Foreign Policy Research Institute, ved en høring om -
 Hold af mobile 3-D printrobotter kunne reparere broer på Jorden og bygge dem til MarsEt multidisciplinært robotteam bestående af professorer ved NYU Tandon School of Engineering er ved at designe kontrolsystemer til 3D-printere på robotarme oven på mobilen, roving platforme. Fungerer
Hold af mobile 3-D printrobotter kunne reparere broer på Jorden og bygge dem til MarsEt multidisciplinært robotteam bestående af professorer ved NYU Tandon School of Engineering er ved at designe kontrolsystemer til 3D-printere på robotarme oven på mobilen, roving platforme. Fungerer -
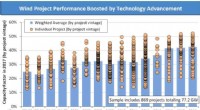 Rapport bekræfter vindteknologiske fremskridt fortsætter med at presse vindenergipriserne nedVindprojektets ydeevne styrket af teknologisk fremskridt. Kredit:Berkeley Lab Priser på vindenergi er fortsat attraktive, ifølge en årlig rapport udgivet af det amerikanske energiministerium og ud
Rapport bekræfter vindteknologiske fremskridt fortsætter med at presse vindenergipriserne nedVindprojektets ydeevne styrket af teknologisk fremskridt. Kredit:Berkeley Lab Priser på vindenergi er fortsat attraktive, ifølge en årlig rapport udgivet af det amerikanske energiministerium og ud -
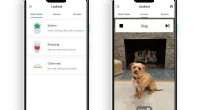 Klippe, saks, blomst, boks. Lookout informerer blindeSkærmbillede af Lookouts tilstande inklusive, Udforske, Handle ind, ”” Hurtiglæsning ”Andet skærmbillede af Lookout, der registrerer en hund i kamerarammen. Kredit:Google Det ser ud til, at Micro
Klippe, saks, blomst, boks. Lookout informerer blindeSkærmbillede af Lookouts tilstande inklusive, Udforske, Handle ind, ”” Hurtiglæsning ”Andet skærmbillede af Lookout, der registrerer en hund i kamerarammen. Kredit:Google Det ser ud til, at Micro
- Problemer med brygning ?:Brexit -udfordring for Guinness forsyningskæde
- Microsoft og Sony går sammen om videospil i skyen, men hvad betyder det for gamere?
- Ny undersøgelse afslører, at folk er mere tilbøjelige til at donere, når de bliver mindet om der…
- Hvordan en gruppe skoleelever opdagede lyden af solstorme
- Hvordan man identificerer hveps og bier
- Mønstre for tvangsmæssig smartphonebrug foreslår, hvordan man kan slippe af med vanen