


Hold af mobile 3-D printrobotter kunne reparere broer på Jorden og bygge dem til Mars
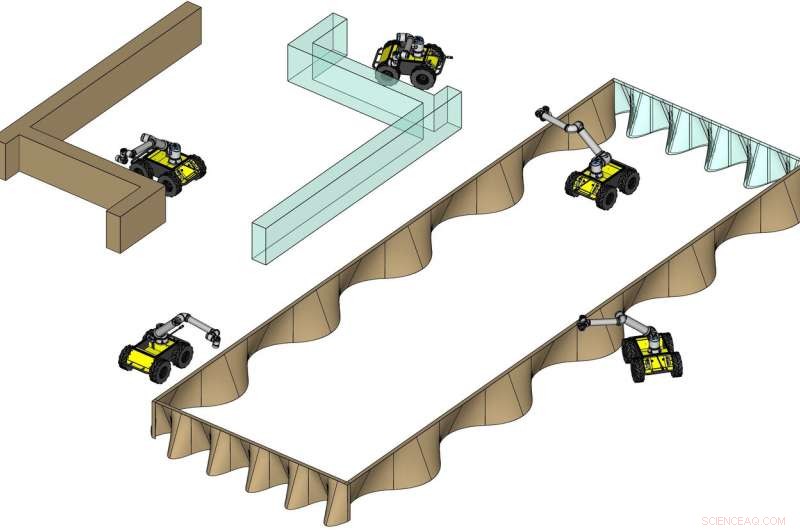
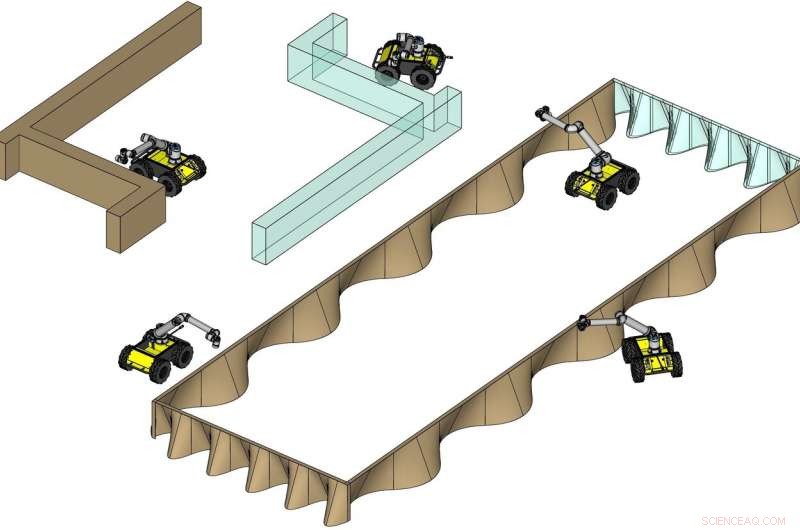
Et multidisciplinært robotteam bestående af professorer ved NYU Tandon School of Engineering er ved at designe kontrolsystemer til 3D-printere på robotarme oven på mobilen, roving platforme. Fungerer i teams -- et koncept kaldet collective additive manufacturing (CAM) -- disse printere, med maskinlæring og anden kunstig intelligens (AI)-funktioner, kunne reparere civile strukturer; arbejde i havdybder og katastrofezoner; eller endda gå til rummet for at arbejde på månen, Mars, og videre. Kredit:NYU Tandon
Kommerciel 3-D-print – eller additiv fremstilling (AM) – er en blomstrende industri. Men hvis printere blev befriet fra den typiske opsætning, der involverede en ubevægelig boks og et portal, og sat fri til at arbejde i roving, samarbejdshold, AM-virksomheden kan være meget større med mange flere applikationer, herunder som robotmurere på byggepladser og reparation af smuldrende by- og landlig civil infrastruktur.
Et multidisciplinært robotteam på NYU Tandon School of Engineering, vært af NYU's Center for Urban Science and Progress (CUSP) og støttet af et 1,2 millioner dollars tilskud fra National Science Foundation (NSF), arbejder på at gøre konceptet til virkelighed ved at designe autonome systemer til 3-D-printere på robotarme knyttet til mobil, roving platforme. Fungerer i teams – et koncept kaldet collective additive manufacturing (CAM) – disse printere, med maskinlæring og anden kunstig intelligens (AI)-funktioner, kunne reparere broer, tunneler og andre civile strukturer; arbejde i havdybder og katastrofezoner; eller endda gå til rummet for at arbejde på månen, Mars, og videre.
Forskerne, Chen Feng, Maurizio Porfiri, Ludovic Righetti, og Weihua Jin, professorer ved Institut for Bygnings- og Byteknik, Mekanik og rumfartsteknik, og elektro- og computerteknik, vil fokusere på tre områder, der er afgørende for at gøre 3-D-print CAM-teams levedygtige:autonomi, styring, realtidssystemer og netværk:
- Planlægning og lokalisering:Printere skal være i stand til at lokalisere sig i forhold til hinanden og de strukturer, de bygger, efterhånden som de ændrer sig og vokser, og gør det uden at stole på globale positioneringssystemer, især til udenjordiske applikationer
- Model Predictive Control:Den mobile base og manipulatoren skal være både effektiv og stabil nok til at opnå udskrivning, der er både hurtig og af høj kvalitet, og i stand til at tilpasse sig i realtid til uventede eller uønskede variationer i de virkelige forhold på stedet, eller i uventede variationer i, hvordan printerhovedet afsætter cement eller andet materiale
- Udskrivning og koordinering:Synkronisering af bevægelsen af flere printere ved hjælp af design af de dele, der skal udskrives, og selve de faktiske udviklende strukturer som kort til den fysiske koordinering af udskrivningsrobotter
Feng forklarede, at målet er nøjagtighed, effektivitet, og tilpasningsevne til miljøet og til realtidsforhold – snarere den måde, en navigationsapp omdirigerer et køretøj på, som den fornemmer har afveget fra en kortlagt kurs. I modsætning til den typiske GPS-baserede navigationstjeneste, imidlertid, justeringerne skal være lynhurtige og nøjagtige til et par millimeter, ikke et par dusin fod. Han tilføjede, at holdets unikke kombination af ekspertise inden for robotteknologi, kunstig intelligens, kontrol teori, og dynamiske systemer gør udfordringerne overkommelige.
Feng vil fokusere på planlægning og lokalisering, tackle sådanne udfordringer som, hvordan man gør robotten i stand til at identificere, hvornår og hvornår den ikke har brug for en høj grad af præcision i at lokalisere sig selv.
"Roboten skal kunne bevæge sig hurtigt til printområdet, observere de virkelige forhold - såsom ujævnt underlag, da den virkelige verden ikke er plan - så lav kompensation med det samme, " sagde han. "Og selvom vi ønsker at have en højere grad af nøjagtighed i strukturområdet, jo længere du er fra strukturen, jo mindre har du brug for, " forklarede han. "Dette vil involvere en ny form for proaktiv lokalisering."
NYU Tandon professorer Chen Feng, Ludovic Righetti og Maurizio Porfiri designer systemer til kollektiv additiv fremstilling, hvor hold af mobile 3D-printrobotter arbejder sammen om at reparere eller bygge strukturer, eller endda arbejde på månen eller Mars. Kredit:NYU Tandon
Righetti vil arbejde på optimale styringsalgoritmer i realtid for hver mobile printer, for at give robotten mulighed for hurtigt at tilpasse sig miljøet.
"Hver robot skal observere, hvad der bliver udskrevet, selvstændigt associere det med projektdesignet, og genkend øjeblikkeligt, hvis den trykte struktur har afviget fra den, og hvor meget, og hele tiden beslutte, hvad der er de næstbedste handlinger for at sikre korrekt udskrivning af strukturen, " han sagde.
Porfiri vil udvikle en matematisk ramme, der giver robotterne mulighed for autonomt at koordinere deres respektive handlinger inden for det udviklende fysiske miljø, gør det muligt for flere mobile printere samtidig at skabe en struktur med højere effektivitet. Denne evne ville være særlig vigtig på steder som Mars, hvor der ikke er nogen fjernserver tæt nok på til at kontrollere robotternes koordinerede indsats uden tidsforsinkelse.
"Forskelligt fra droner, der flyver i formation eller autonome biler, der holder afstand til hinanden, vores mobile printere efterlader et unikt fodaftryk i det fysiske miljø:det objekt, der udskrives. Mit arbejde vil udnytte netop dette fodaftryk til at etablere effektive algoritmer til koordinering og kollektiv udskrivning."
Jin vil hjælpe teamet med at udvikle nye kompositmaterialer, der egner sig til mobil 3-D betonprint. Holdet planlægger at demonstrere effektiviteten af algoritmerne ved 3D-print i den virkelige verden af de nye betoner ved hjælp af mobile printere, som de vil bygge på NYU Tandon.
"For at frigøre det fulde potentiale af kollektiv additiv fremstilling, flere videnskabelige grænser skal rykkes, sikre optimal udrulning af flere mobile robotter, der udskriver store strukturer i henhold til en konstrueret, virtuelt design, " sagde Feng.
Projektet omfatter en industriworkshop om CAM, en udendørs offentlig udstilling, overkommelig/åbent uddannelsessæt på CAM, K-12 desktop-skala CAM konkurrence, iværksætteraktiviteter og en mangfoldighedsindsats for studerende med alle baggrunde.
Sidste artikelBig Techs øko-løfter bremser ikke dets jagt på Big Oil
Næste artikelBlockchain konceptet
 Varme artikler
Varme artikler
-
 En maskinlæringsmetode til beholdningsbegrænsede dynamiske priserKredit:iStock I 1933, William R. Thompson offentliggjorde en artikel om en bayesisk modelbaseret algoritme, der i sidste ende ville blive kendt som Thompson-prøveudtagning. Denne heuristik blev st
En maskinlæringsmetode til beholdningsbegrænsede dynamiske priserKredit:iStock I 1933, William R. Thompson offentliggjorde en artikel om en bayesisk modelbaseret algoritme, der i sidste ende ville blive kendt som Thompson-prøveudtagning. Denne heuristik blev st -
 Internettet kan klare stigningen i USA og Europas lockdown:NokiaAI vil tjene til at udvikle et netværkskontrolsystem, der ikke kun registrerer og reagerer på problemer, men også kan forudsige og undgå dem. Kredit:CC0 Public Domain Frygten for, at internetnetvæ
Internettet kan klare stigningen i USA og Europas lockdown:NokiaAI vil tjene til at udvikle et netværkskontrolsystem, der ikke kun registrerer og reagerer på problemer, men også kan forudsige og undgå dem. Kredit:CC0 Public Domain Frygten for, at internetnetvæ -
 Er vi nået til Peak Car?Myldretiden i Vancouver, B.C. Har Nordamerika nået Peak Car? Kredit:StoneMonkeyswk/Shutterstock.com General Motors har annonceret, at de lukker fem produktionsfaciliteter og dræber seks køretøjspl
Er vi nået til Peak Car?Myldretiden i Vancouver, B.C. Har Nordamerika nået Peak Car? Kredit:StoneMonkeyswk/Shutterstock.com General Motors har annonceret, at de lukker fem produktionsfaciliteter og dræber seks køretøjspl -
 Tesla i Autopilot -tilstand satte fart på, før den styrtede nedI denne fredag, 11. maj kl. 2018, foto frigivet af South Jordan Police Department viser en trafikkollision med en Tesla Model S sedan med en brandvæsenets mekanikerbil stoppet ved rødt lys i South Jor
Tesla i Autopilot -tilstand satte fart på, før den styrtede nedI denne fredag, 11. maj kl. 2018, foto frigivet af South Jordan Police Department viser en trafikkollision med en Tesla Model S sedan med en brandvæsenets mekanikerbil stoppet ved rødt lys i South Jor
- Et strejf af guld og sølv
- Et unikt billede af migrationsmønstre i Sydafrika kan hjælpe byplanlægningen
- Stigende havniveauer vil sætte skub i moderate oversvømmelser i nogle områder, alvorlige oversvø…
- Bange for højder i rummet:NASA astronaut detaljerer flyvning
- Kobolt rammer overskrifter, da Glencore lukker nøgleminen
- Selvsamlende nanomateriale giver vej til mere effektiv, overkommelig udnyttelse af solenergi