


REPLAB:En billig benchmarkplatform til robotlæring
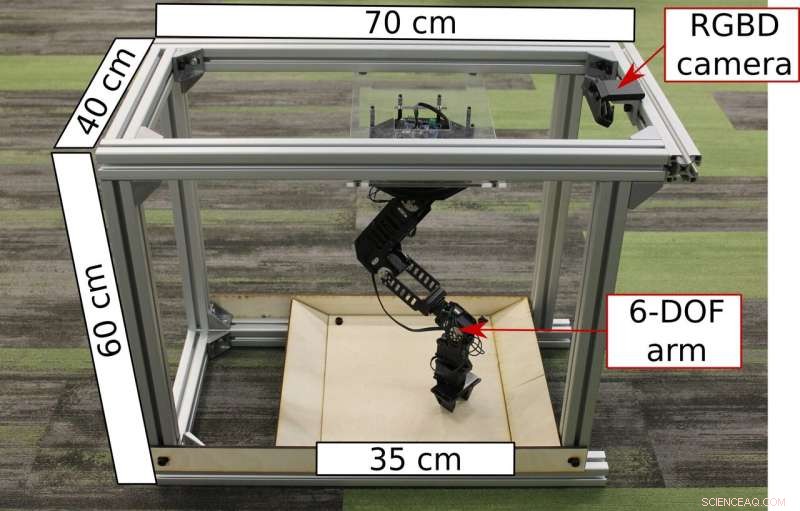
Et REPLAB-celle-nærbillede med anmærkninger. Kredit:Yang et al.
Forskere ved UC Berkeley har udviklet en reproducerbar, lavpris og kompakt benchmark platform til at evaluere robotteknologiske læringstilgange, som de kaldte REPLAB. Deres seneste undersøgelse, præsenteret i et papir, der er forududgivet på arXiv, blev støttet af Berkeley DeepDrive, Office of Naval Research (ONR), Google, NVIDIA og Amazon.
"Maskinlæringsbaserede tilgange er begyndt at blive populære inden for robotteknologi for nylig, men der er i øjeblikket ingen nem måde at sammenligne tilgange på på grund af store forskelle i hardwareopsætningerne, der bruges i forskellige laboratorier, "Brian Yang, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "For eksempel, i at forstå forskning, alt fra typen af arm eller griber ned til materialet, som griberen er lavet af, påvirker gribeevnen, så selvom du får bedre grebsnøjagtighed end en metode fra sidste år, det er ikke klart, om det er på grund af bedre kontrol eller bare bedre hardware."
I de seneste år, der har været et stigende behov for standardiserede foranstaltninger og benchmark-platforme til at evaluere maskinlæringstilgange til robotteknologi. At etablere effektive benchmarks kan nogle gange være udfordrende, især til robotteknologi, hvor robotter forventes at generalisere lærte modeller til nye objekter og situationer. Den nye benchmark-platform, der er udviklet på UC Berkeley, giver en billig og let reproducerbar løsning til at teste robotteknologiske objektmanipulationstilgange.
"Andre anvendelser af maskinlæring såsom computersyn og naturlig sprogbehandling har haft stor gavn af at have datasæt og benchmarks, da de driver forskningsfokus på vigtige problemer, give en måde at kortlægge et forskningssamfunds fremskridt, og hjælpe med hurtigt at identificere, udbrede, og forbedre ideer, der fungerer godt, "Dinesh Jayaraman, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Vi designede REPLAB til at tjene denne funktion for robotlæringsforskningssamfundet."
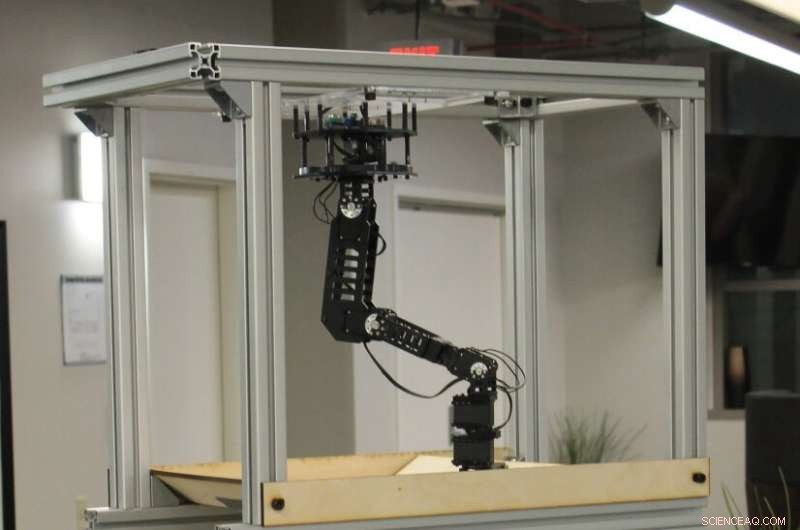
To REPLAB-celler stablet oven på hinanden. Kredit:Yang et al.
REPLAB har flere komponenter, inklusive en robotarm, et kamera og et arbejdsområde, placeres i et kubisk rum på 70 x 40 x 60 cm. Platformen koster cirka 2000 dollars at bygge og kan samles på få timer. Dets kompakte og billige design kunne give flere forskere mulighed for, selv dem med et begrænset budget, at evaluere deres rammer og tilgange.
"REPLAB er en fuldt standardiseret hardwareplatform til robotmanipulation, der er designet med let vedtagelse i tankerne, " Jayaraman forklarede. "Den indeholder en enkelt lavprisarm (Trossen WidowX), et RGB-D-kamera (Intel Realsense SR300) og et standardiseret, kompakt arbejdsområde, der er nemt at samle på få timer ved hjælp af vores samlevejledning. Alt sammen, en hel REPLAB-celle koster omkring 2k USD (sammenlignet med standardarmopsætninger, der koster 40-50k), optager omkring 10 gange mindre plads end en standardarmopsætning."
Ud over selve platformen, forskerne foreslog en skabelon til et forståeligt benchmark, der inkluderer en opgavedefinition og evalueringsprotokol, præstationsmål og et datasæt på 92, 000 grebsforsøg. Grundlinjerne for dette benchmark blev etableret via implementeringen, evaluering og analyse af flere eksisterende gribetilgange.
"Fordi vi har denne standardiserede hardwareplatform, vi er også i stand til at dele en open source softwarepakke med implementeringer af forskellige robotlæringsalgoritmer (indtil videre, overvågede læringsalgoritmer til at gribe og forstærke læringsalgoritmer til 3D-punktrækkevidde), " sagde Jayamaran. "Hvis du konstruerer din egen REPLAB-celle, du kan downloade et Docker-billede, der indeholder disse implementeringer og køre dem ud af boksen på din celle."
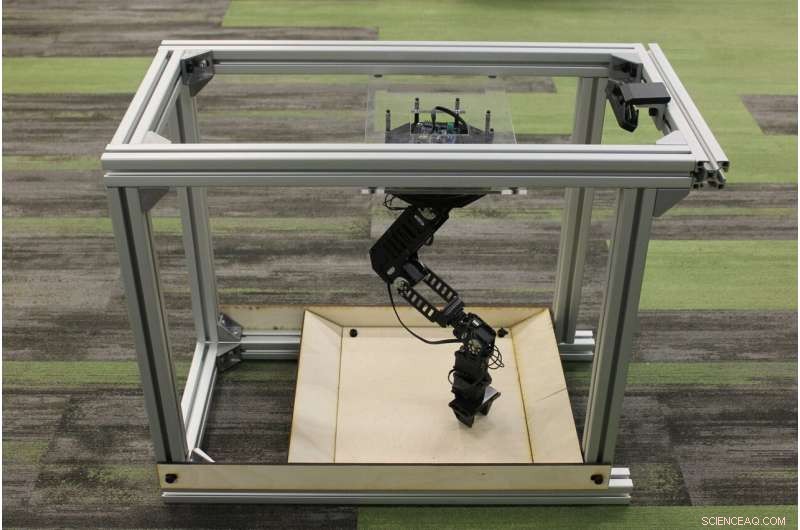
En REPLAB-celle uden anmærkninger. Kredit:Yang et al.
Indtil nu, forskerne har primært udført evalueringer med det formål at verificere gennemførligheden af REPLAB som platform for reproducerbar forskning i robotteknologi, med fokus på to særlige opgaver:gribe og 3-D punkt nå. Med andre ord, de har brugt deres platform til at implementere og evaluere flere dybe overvågede læringstilgange til disse særlige gribeopgaver. Deres resultater tyder på, at platformen udsætter eksisterende algoritmer for noget understuderede udfordringer, der er afgørende for udviklingen af robotter, der klarer sig godt i naturen, såsom støjende aktivering.
"Vi har også bekræftet, at resultaterne forbliver konsistente på tværs af flere REPLAB-celler, hvilket er vigtigt for at tænke på REPLAB-baserede algoritmeimplementeringer og -evalueringer som reproducerbare, " sagde Jayamaran. "Vi tror på, at REPLAB vil lette konsistente og reproducerbare fremskridtsmålinger for robotlæring, sænke barrieren for adgang til robotteknologi for forskere inden for beslægtede discipliner som machine learning, og opmuntre delbar kode og data på tværs af forskere."
Den nye platform introduceret af Yang, Jayaraman og deres kolleger kunne snart give flere forskere mulighed for at evaluere tilgange til en bred vifte af manipulationsopgaver. Ligesom andre benchmank platforme, imidlertid, for at lykkes, brugen af REPLAB bør involvere robotlæringsforskningssamfundet som helhed.
"Mens vi investerer i at vedligeholde platformen i mange år fremover, vi inviterer til bidrag fra samfundet, såsom nye algoritmeimplementeringer, datasæt, og benchmarks og til vores open source platform, " sagde Jayaraman. "Den store vision er at nå et punkt, hvor en ny avanceret robotindlæringsalgoritme frigives, en forsker, der sidder hvor som helst i verden, ville være i stand til at downloade, vurdere, gentage og forbedre en implementering inden for få dage. Vi tror, at REPLAB hjælper med at fremskynde forskningen ved at gøre to ting:at sænke adgangsbarrieren og give mange flere mennesker mulighed for at deltage i den nyeste forskning, og tillader denne form for hurtig iteration og forbedring gennem kodedeling."
I deres fremtidige arbejde, forskerne ved UC Berkeley planlægger at udvikle deres platform yderligere, tilføjelse af en komplet REPLAB cellesimulator og algoritmer til robust kontrol, og samtidig tackle nye manipulationsudfordringer. De håber også at udvide det officielle REPLAB github-repo og docker-billede, herunder implementeringer af mere state-of-the-art algoritmer.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Rapporten sigter mod uudnyttet arbejdsstyrke for Israels voksende højteknologiske sektorKvinder, Arabere og ultraortodokse er underrepræsenteret i Israels teknologisektor, ifølge en nylig rapport Væksten i Israels magtfulde højteknologiske sektor modsvares ikke af tilstrækkelige stig
Rapporten sigter mod uudnyttet arbejdsstyrke for Israels voksende højteknologiske sektorKvinder, Arabere og ultraortodokse er underrepræsenteret i Israels teknologisektor, ifølge en nylig rapport Væksten i Israels magtfulde højteknologiske sektor modsvares ikke af tilstrækkelige stig -
 Arkader søger at tage virtual reality gaming mainstreamVirtual reality har været langsom til virkelig at tage fart, dels på grund af den høje pris på top-end headsets og udfordringerne ved at opsætte komplekse systemer derhjemme Spillere iført headset
Arkader søger at tage virtual reality gaming mainstreamVirtual reality har været langsom til virkelig at tage fart, dels på grund af den høje pris på top-end headsets og udfordringerne ved at opsætte komplekse systemer derhjemme Spillere iført headset -
 Udnyttelse af havenergi på alle skalaer, fra et landsbymikronet til et stort tidevandsindløbLevi Kilcher og Bob Lewis forbereder sig på at lancere StableWing havturbulensmålingsplatformen i den vestlige passage af Maine. Kredit:Levi Kilcher, NREL Nationens største, men mindst tætbefolked
Udnyttelse af havenergi på alle skalaer, fra et landsbymikronet til et stort tidevandsindløbLevi Kilcher og Bob Lewis forbereder sig på at lancere StableWing havturbulensmålingsplatformen i den vestlige passage af Maine. Kredit:Levi Kilcher, NREL Nationens største, men mindst tætbefolked -
 Maskinlæring leder efter nyttige data i amerikanske tordenvejrsrapporterEt tordenvejrs hyldesky nærmer sig Iowa State campus. Kredit:Bill Gallus Bill Gallus har været kendt for at jagte en sommerstorm eller to. Men han behøvede ikke at gå efter denne. Den 17. juli 20
Maskinlæring leder efter nyttige data i amerikanske tordenvejrsrapporterEt tordenvejrs hyldesky nærmer sig Iowa State campus. Kredit:Bill Gallus Bill Gallus har været kendt for at jagte en sommerstorm eller to. Men han behøvede ikke at gå efter denne. Den 17. juli 20
- NASAs Aqua -satellit ser tropisk cyklon Mekunu styrke
- En fosfolipidvej fra planter til parasitter
- Opdagelse af bakteriel enzymaktivitet kan føre til nye sukkerbaserede lægemidler
- Undersøgelse:Beboere forlod store metroer under pandemien til familien
- Edinburgh Zoo:panda Tian Tian føder ikke i år
- Sammensmeltet billedbehandling afslører skrift fra det sjette århundrede skjult inde i bogbinding