


Autonome både kan målrette og låse hinanden fast
MIT -forskere har givet deres flåde af autonome "roboats" muligheden for automatisk at målrette og hænge fast i hinanden - og blive ved med at prøve, hvis de fejler. Roboterne er designet til at transportere mennesker, samle skrald, og samler sig selv til flydende strukturer i kanalerne i Amsterdam. Kredit:Massachusetts Institute of Technology
Amsterdam byder på en fremtid, hvor flåder af autonome både krydser sine mange kanaler for at transportere varer og mennesker, samle skrald, eller samles i flydende etaper og broer. For at fremme den vision, MIT -forskere har givet deres flåde af robotbåde nye muligheder - som udvikles som en del af et igangværende projekt - der lader dem målrette og hænge fast i hinanden, og fortsæt med at prøve, hvis de fejler.
Omkring en fjerdedel af Amsterdams overfladeareal er vand, med 165 kanaler, der snor sig langs travle bygader. For flere år siden, MIT og Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute) gik sammen om "Roboat" -projektet. Ideen er at bygge en flåde af autonome robotbåde - rektangulære skrog udstyret med sensorer, thrustere, mikrokontrollere, GPS -moduler, kameraer, og anden hardware - der giver intelligent mobilitet på vandet for at lindre overbelastning i byens travle gader.
Et af projektets mål er at skabe roboatenheder, der leverer on-demand transport på vandveje. Et andet mål er at bruge roboatenhederne til automatisk at danne "pop-up" strukturer, såsom fodbroer, præstationsfaser, eller endda madmarkeder. Strukturerne kunne derefter automatisk adskilles på fastsatte tidspunkter og reformere til målstrukturer for forskellige aktiviteter. Derudover roboatenhederne kunne bruges som smidige sensorer til at indsamle data om byens infrastruktur, og luft- og vandkvalitet, blandt andet.
I 2016, MIT -forskere testede en roboat -prototype, der krydsede rundt i Amsterdams kanaler, Bevæger sig fremad, baglæns, og lateralt langs en forprogrammeret sti. Sidste år, forskere designet billige, 3D-trykt, en kvart udgave af bådene, som var mere effektive og smidige, og blev udstyret med avancerede banesporingsalgoritmer.
I et papir fremlagt på den internationale konference om robotteknologi og automatisering, forskerne beskriver roboatenheder, der nu kan identificere og oprette forbindelse til dockingstationer. Kontrolalgoritmer leder roboats til målet, hvor de automatisk forbinder til en tilpasset låsemekanisme med millimeterpræcision. I øvrigt, robotten bemærker, om den har savnet forbindelsen, bakker op, og prøver igen.
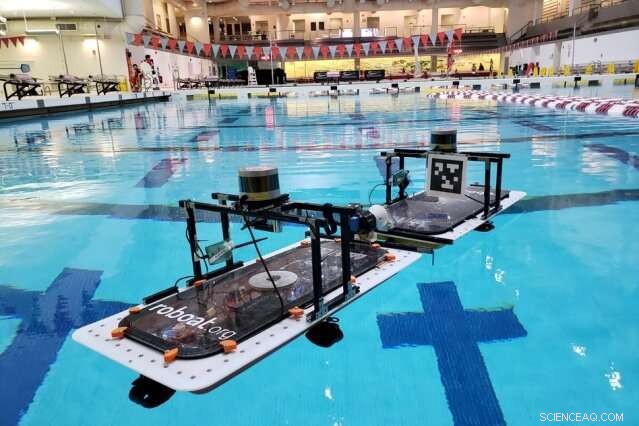
Forskerne testede låseteknikken i en swimmingpool ved MIT og i Charles River, hvor vandet er hårdere. I begge tilfælde, roboatenhederne var normalt i stand til at oprette forbindelse på cirka 10 sekunder, omkring 1 meter væk, eller de lykkedes efter et par mislykkede forsøg. I Amsterdam, systemet kan især være nyttigt til skraldespand natten over. Roboat -enheder kunne sejle rundt om en kanal, lokalisere og låse på platforme med affaldscontainere, og trække dem tilbage til indsamlingsfaciliteter.
"I Amsterdam, kanaler blev engang brugt til transport og andre ting, vejene nu bruges til. Veje nær kanaler er nu meget overbelastede - og har støj og forurening - så byen ønsker at tilføje mere funktionalitet tilbage til kanalerne, "siger første forfatter Luis Mateos, en kandidatstuderende i Institut for Bystudier og Planlægning (DUSP) og en forsker i MIT Senseable City Lab. "Selvkørende teknologier kan spare tid, omkostninger og energi, og forbedre byen fremad. "
"Målet er at bruge roboat -enheder til at bringe nye muligheder til live på vandet, "tilføjer medforfatter Daniela Rus, direktør for datalogi og kunstig intelligenslaboratorium (CSAIL) og Andrew og Erna Viterbi professor i elektroteknik og datalogi. "The new latching mechanism is very important for creating pop-up structures. Roboat does not need latching for autonomous transportation on water, but you need the latching to create any structure, whether it's mobile or fixed."
Joining Mateos on the paper are:Wei Wang, a joint postdoc in CSAIL and the Senseable City Lab; Banti Gheneti, a graduate student in the Department of Electrical Engineering and Computer Science; Fabio Duarte, a DUSP and Senseable City Lab research scientist; and Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, tilbage, and sides. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Typisk, this would generate a 3-D map for boat motion, including roll, pitch, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. Ved hjælp af disse oplysninger, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Hvis, imidlertid, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, sige, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. I starten all roboat units will be given a code to stay exactly a meter apart. Derefter, the code changes to direct the first roboat to latch. After, the screen switches codes to order the next roboat to latch, og så videre. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " han siger, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT -forskning, innovation og undervisning.
Sidste artikelForbliver tændt til siliciumbaseret elektronik
Næste artikelBeskytter vores energiinfrastruktur mod cyberangreb
 Varme artikler
Varme artikler
-
 Forskere afmystificerer centralisering i cryptocurrency-minedriftIllustration af centralisering i Blockchain Mining. Flere store minepuljer dominerer processen. De resterende ressourcer er spredt blandt Oceanic Miners. Kredit:SUTD Blockchain-teknologi er blevet
Forskere afmystificerer centralisering i cryptocurrency-minedriftIllustration af centralisering i Blockchain Mining. Flere store minepuljer dominerer processen. De resterende ressourcer er spredt blandt Oceanic Miners. Kredit:SUTD Blockchain-teknologi er blevet -
 Air France-KLM udnævner midlertidige ledere efter administrerende direktørers hurtige exitStrejker har kostet Air France hundredvis af millioner af euro i år Air France-KLM udnævnte tirsdag finansdirektør Frederic Gagey til sin midlertidige CEO efter Jean-Marc Janaillacs pludselige exi
Air France-KLM udnævner midlertidige ledere efter administrerende direktørers hurtige exitStrejker har kostet Air France hundredvis af millioner af euro i år Air France-KLM udnævnte tirsdag finansdirektør Frederic Gagey til sin midlertidige CEO efter Jean-Marc Janaillacs pludselige exi -
 Ny AI ser som et menneske, udfylde de tomme felterDataloger ved University of Texas i Austin har lært en kunstig intelligensagent, hvordan man gør noget, som normalt kun mennesker kan gøre - tage et par hurtige glimt rundt og udlede hele dets miljø.
Ny AI ser som et menneske, udfylde de tomme felterDataloger ved University of Texas i Austin har lært en kunstig intelligensagent, hvordan man gør noget, som normalt kun mennesker kan gøre - tage et par hurtige glimt rundt og udlede hele dets miljø. -
 Kunstværker af en algoritme er på auktion, så betyder det, at AI nu er kreativ?Ville du købe et maleri skabt af kunstig intelligens? Kredit:Oplagt Et maleri genereret af kunstig intelligens vil blive sat til salg på auktion senere på måneden – hvilket igen rejser spørgsmålet
Kunstværker af en algoritme er på auktion, så betyder det, at AI nu er kreativ?Ville du købe et maleri skabt af kunstig intelligens? Kredit:Oplagt Et maleri genereret af kunstig intelligens vil blive sat til salg på auktion senere på måneden – hvilket igen rejser spørgsmålet
- Stivelse kan erstatte almindelig plast i fødevareemballage
- Sådan konverteres milligram pr. Liter til dele pr. Million
- Tid, forældre bruger sammen med børn, er nøglen til akademisk succes
- IBM siger, at tab af AI -debat stadig er en sejr
- Carbyne-morfer, når de strækkes:Beregninger viser, at kulstof-atomkæden ville gå metal til halvl…
- Oktoberfest minder øger livsglæde, kunde loyalitet