


Anvendelse af aktiv inferens kropsopfattelse på en humanoid robot
Kredit:Oliver, Lanillos og Cheng.
En central udfordring for robotforskere er at udvikle systemer, der kan interagere med mennesker og deres omgivende miljø i situationer, der involverer forskellige grader af usikkerhed. Faktisk, mens mennesker hele tiden kan lære af deres erfaringer og opfatte deres krop som en helhed, når de interagerer med verden, robotter har endnu ikke disse muligheder.
Forskere ved det tekniske universitet i München har for nylig gennemført en ambitiøs undersøgelse, hvor de forsøgte at anvende "aktiv slutning, "en teoretisk konstruktion, der beskriver evnen til at forene opfattelse og handling, til en menneskelig robot. Deres undersøgelse er en del af et bredere EU-finansieret projekt kaldet SELFCEPTION, som bygger bro mellem robotik og kognitiv psykologi med det formål at udvikle mere opfattende robotter.
"Det oprindelige forskningsspørgsmål, der udløste dette arbejde, var at give humanoide robotter og kunstige midler generelt kapaciteten til at opfatte deres krop, som mennesker gør, "Pablo Lanillos, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Hovedmålet var at forbedre deres evner til at interagere under usikkerhed. Under paraplyen af Selfception.eu Marie Skłodowska-Curie-projektet definerede vi oprindeligt en køreplan for at inkludere nogle karakteristika af menneskelig perception og handling i robotter."
I deres undersøgelse, Lanillos og hans kolleger forsøgte at få en bedre forståelse af menneskelig perception og modellerede den derefter til en humanoid robot. Dette viste sig at være en meget vanskelig opgave, så mange detaljer om, hvordan sensorisk information (visuel, taktile, osv.) behandles af mennesker, er stadig ukendte. Forskerne hentede inspiration fra Hermann Von Helmholtz og Karl Fristons arbejde, især fra deres teori om aktiv inferens, som er blandt de mest indflydelsesrige neurovidenskabskonstruktioner.
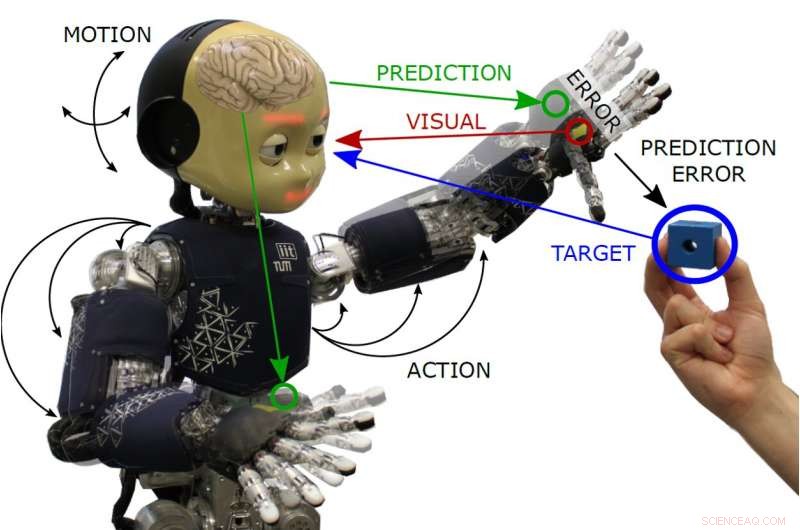
"I det væsentlige, vi foreslår, at robotten konstant nærmer sig sin krop ved hjælp af dens ufuldkomne indlærte modeller, "Guillermo Oliver, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Algorithmen, baseret på princippet om fri energi, præsenterer opfattelse og handling, der arbejder for et fælles mål:at reducere forudsigelsesfejlen. I denne tilgang handling gør, at sensoriske data bedre svarer til forudsigelsen fra den indre model."
Lanillos, Oliver og professor Gordon Cheng var de første til at anvende aktiv slutning på en rigtig robot. Faktisk, indtil nu, aktiv inferens blev kun testet teoretisk eller i simuleringer, der delvist var forudindtaget af forenkling af de anvendte modeller.
Deres tilgang forsøger at reproducere menneskers evne til at ændre deres handlinger (f.eks. deres gang) i særlige situationer, for eksempel, når de nærmer sig en metro -rulletrappe, men pludselig opdager, at den er ødelagt eller ude af drift, og tilpasse deres bevægelser i overensstemmelse hermed. Opfattelses- og kontrolalgoritmen udviklet af Lanillos, Oliver og Cheng gentager en lignende mekanisme i robotter.
For eksempel, i en rækkevidde, hvor en robot skal røre ved et objekt, modellen skaber en fejl i den ønskede håndplacering, der udløser en handling mod objektet. Ligevægten (eller minimering) opnås, når robotens hånd og objektet er på samme sted.
"Denne tilgang er sjælden i roboticsamfundet, men giver medførlighed, tillader kombination af sensorisk information fra forskellige kilder og tillader indstilling af pålideligheden af hver sensorinformation, afhængig af præcisionen, " sagde Oliver.
Forskerne brugte deres algoritme til iCub, en open source kognitiv humanoid robot udviklet som en del af et andet EU-finansieret projekt, og evaluerede dens ydeevne i opgaver, der involverede dobbeltarmsrækkende og aktiv hovedsporing. I deres tests, robotten var i stand til at udføre avanceret og robust rækkevidde adfærd, samt aktiv hovedsporing af objekter i dets synsfelt.
"Den humanoide robot var i stand til at udføre robuste to-arms rækkevidde og visuelle sporingsopgaver af et objekt ved hjælp af den samme matematiske model, " sagde Oliver. "Med denne type algoritme, vi vil gerne ændre det nuværende syn på input-output perception pipeline (f.eks. state-of-the-art neurale netværk) ved at håndhæve ideen om close loop perception, hvor frem og tilbage passerer behandles online, og inkludere handling som en anden uundgåelig variabel."
Lanillos, Oliver og Cheng er de første til at implementere en model baseret på princippet om fri energi på en ægte humanoid robot. Deres resultater tyder på, at det er muligt at validere sådanne modeller i den virkelige verden, som det er at analysere fordelene ved disse modeller i nærvær af støjende sensorisk information, okklusioner eller når kun delvis information er tilgængelig. Forskerne planlægger nu at anvende deres model på andre robotter og teste dens generaliserbarhed.
"På lang sigt, vi ønsker at muliggøre udviklingen af kunstige midler med samme evner til kropstilpasning og interaktion som mennesker, " sagde Lanillos. "I mellemtiden, vi udvikler nye bio-inspirerede kunstig intelligens-algoritmer. I fremtiden, vi vil også bruge denne model til at undersøge kropsejerskab og agentur, og hvem ved, vi kan en dag muliggøre selvgenkendelse i maskiner."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Apple opdaterer iOS12 med nye emojis, gruppe FaceTime-videoopkaldKredit:CC0 Public Domain Ud over den nye iPad, MacBook Air og Mac Mini opdateres, Apple gav også verden nye emoji, evnen til at foretage FaceTime-videoopkald med flere personer, og nogle fede foto
Apple opdaterer iOS12 med nye emojis, gruppe FaceTime-videoopkaldKredit:CC0 Public Domain Ud over den nye iPad, MacBook Air og Mac Mini opdateres, Apple gav også verden nye emoji, evnen til at foretage FaceTime-videoopkald med flere personer, og nogle fede foto -
 Feds skal lette reglerne for droneflyvninger over menneskemængder og om nattenI denne 29. april, 2018, fil foto, en droneoperatør hjælper med at hente en drone efter at have fotograferet over Hart Island i New York. Føderale embedsmænd planlægger at lette restriktionerne for at
Feds skal lette reglerne for droneflyvninger over menneskemængder og om nattenI denne 29. april, 2018, fil foto, en droneoperatør hjælper med at hente en drone efter at have fotograferet over Hart Island i New York. Føderale embedsmænd planlægger at lette restriktionerne for at -
 Ure kan gå en lille gøg med skift af elnetDenne tirsdag, 30. juni, 2015-filbillede viser et vægur i New York. Indkoblede ure kan miste eller vinde så meget som syv et halvt minut mellem maj og november 2018 på grund af den amerikanske regerin
Ure kan gå en lille gøg med skift af elnetDenne tirsdag, 30. juni, 2015-filbillede viser et vægur i New York. Indkoblede ure kan miste eller vinde så meget som syv et halvt minut mellem maj og november 2018 på grund af den amerikanske regerin -
 EU godkender IBMs køb på 34 mia. USD af Red HatIBMs forbindelse med Red Hat bliver en af de største teknologifusioner nogensinde EUs magtfulde antitrustmyndighed godkendte torsdag IBMs opkøb af open source-softwarevirksomheden Red Hat, en af
EU godkender IBMs køb på 34 mia. USD af Red HatIBMs forbindelse med Red Hat bliver en af de største teknologifusioner nogensinde EUs magtfulde antitrustmyndighed godkendte torsdag IBMs opkøb af open source-softwarevirksomheden Red Hat, en af
- Den type sukker, der bruges til at søde fåremælkskefir, kan forbedre forbrugernes accept
- Hvordan havbundens forvitring driver den langsomme kulstofcyklus
- Qubit i et krystalgitter af bornitrid er en passende sensor
- Er Rossby-bølgerne skyld i, at Jordens magnetfelt driver vestpå?
- Mænd er mere tilbøjelige til at begå voldelige forbrydelser. Hvorfor er det sådan, og hvordan æ…
- Hvordan de blomster, du køber til din mor til Mors Dag, kan være knyttet til den amerikanske krig …