


Øjne til autopiloten:Succesfuld automatisk landing med synsassisteret navigation

Kredit:Andreas Dekiert / C2Land
Automatiske landinger har længe været standardprocedure for kommercielle fly. Mens større lufthavne har den nødvendige infrastruktur til at sikre sikker navigation af flyet, dette er normalt ikke tilfældet i mindre lufthavne. Forskere ved det tekniske universitet i München (TUM) og TU Braunschweig har nu demonstreret en fuldstændig automatisk landing med synsassisteret navigation, der fungerer korrekt uden behov for jordbaserede systemer.
I store lufthavne gør Instrument Landing System (ILS) det muligt for kommercielle fly at lande automatisk med stor præcision. Antenner sender radiosignaler til autopiloten for at sikre, at den navigerer sikkert til landingsbanen. Procedurer er også ved at blive udviklet, som vil tillade automatisk landing baseret på satellitnavigation. Også her kræves et jordbaseret forstærkningssystem.
Imidlertid, systemer som disse er ikke tilgængelige for almindelig luftfart i mindre lufthavne, hvilket er et problem i tilfælde af dårlig sigtbarhed - så kan fly simpelthen ikke flyve. "Automatisk landing er afgørende, især i forbindelse med luftfartens fremtidige rolle, siger Martin Kügler, forskningsassistent ved TUM Chair of Flight System Dynamics. Det gælder for eksempel ved automatiseret flytransport fragt og selvfølgelig når passagerer bruger automatiserede flyvende taxaer.
Kamerabaseret optisk referencesystem
I projektet "C2Land, "støttet af den tyske forbundsregering, TUM-forskere har indgået et samarbejde med Technische Universität Braunschweig om at udvikle et landingssystem, som lader mindre fly lande uden assistance fra jordbaserede systemer.

Kredit:TU Braunschweig
Autopiloten bruger GPS-signaler til at navigere. Problemet:GPS-signaler er modtagelige for måleunøjagtigheder, for eksempel på grund af atmosfæriske forstyrrelser. GPS-modtageren i flyet kan ikke altid pålideligt registrere sådanne interferenser. Som resultat, nuværende GPS-indflyvningsprocedurer kræver, at piloterne overtager kontrollen i en højde på ikke mindre end 60 meter og lander flyet manuelt.
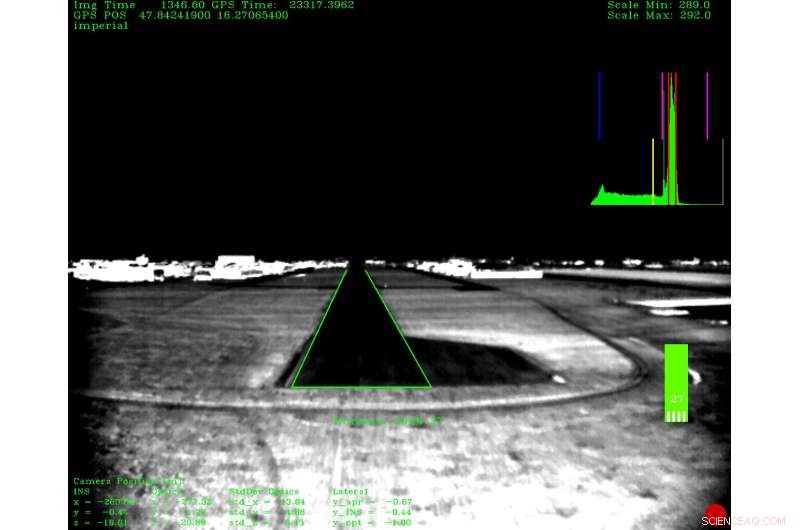
For at gøre fuldstændig automatiserede landinger mulige, TU Braunschweig-teamet designede et optisk referencesystem:Et kamera i det normale synlige område og et infrarødt kamera, der også kan levere data under forhold med dårlig sigtbarhed. Forskerne udviklede skræddersyet billedbehandlingssoftware, der lader systemet bestemme, hvor flyet er i forhold til landingsbanen baseret på de kameradata, det modtager.
TUM forskningsfly har Fly-by-Wire-system
TUM-teamet udviklede hele det automatiske kontrolsystem for TUMs egne forskningsfly, en modificeret Diamond DA42. Flyet er udstyret med et Fly-by-Wire system, der muliggør kontrol ved hjælp af en avanceret autopilot, også udviklet af TUM-forskerne.
Kredit:TU Braunschweig
For at muliggøre automatiske landinger, yderligere funktioner blev integreret i softwaren, såsom sammenligning af data fra kameraerne med GPS-signaler, beregning af en virtuel glidebane for landingsindflyvningen samt flyvestyring for forskellige faser af indflyvningen.
Vellykket landing i Wiener-Neustadt
I slutningen af maj kunne holdet se, da forskningsflyet lavede en fuldstændig automatisk landing på Diamond Aircraft-flyvepladsen. Testpiloten Thomas Wimmer er fuldstændig overbevist af landingssystemet:"Kameraerne genkender allerede landingsbanen i stor afstand fra lufthavnen. Systemet guider derefter flyet gennem landingsindflyvningen helt automatisk og lander det præcist på banens midterlinje. ."
Sidste artikelNy tilgang til energistrategi tegner sig for usikkerhed
Næste artikelNår bekvemmelighed møder overvågning:AI i hjørnebutikken
 Varme artikler
Varme artikler
-
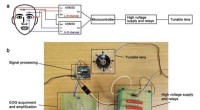 Kontaktlinse:Du blinker og zoomer indSkematisk og foto af systemopsætningen. Kredit: Avancerede funktionelle materialer (2019). DOI:10.1002/adfm.201903762 Forskere er i nyhederne i denne uge på grund af deres bløde biomimetiske lins
Kontaktlinse:Du blinker og zoomer indSkematisk og foto af systemopsætningen. Kredit: Avancerede funktionelle materialer (2019). DOI:10.1002/adfm.201903762 Forskere er i nyhederne i denne uge på grund af deres bløde biomimetiske lins -
 Internetspil Fortnite tilbage med et nyt kapitelPå dette filbillede taget den 12. juni, 2018, folk myldrer udstillingsområdet til overlevelsesspillet Fortnite på den 24. Electronic Expo, eller E3 2018, i Los Angeles Fans af internet-gaming-sens
Internetspil Fortnite tilbage med et nyt kapitelPå dette filbillede taget den 12. juni, 2018, folk myldrer udstillingsområdet til overlevelsesspillet Fortnite på den 24. Electronic Expo, eller E3 2018, i Los Angeles Fans af internet-gaming-sens -
 Foxconns hoved træder tilbage, overvejer præsidentvalgetI denne 2. feb. 2019, fil foto, Terry Gou, formand for Hon Hai Precision Industry Co. Ltd., også kendt som Foxconn, holder en tale under virksomhedens årlige karneval for ansatte i Taipei, Taiwan. Che
Foxconns hoved træder tilbage, overvejer præsidentvalgetI denne 2. feb. 2019, fil foto, Terry Gou, formand for Hon Hai Precision Industry Co. Ltd., også kendt som Foxconn, holder en tale under virksomhedens årlige karneval for ansatte i Taipei, Taiwan. Che -
 Calciumbatterier:Nye elektrolytter, forbedrede egenskaberZhirong Zhao-Karger (venstre) og Zhenyou Li (højre) fra POLiS (Post Lithium Storage) Cluster of Excellence lykkedes med at producere lovende elektrolytter til calciumbatterier. Kredit:Markus Breig/KIT
Calciumbatterier:Nye elektrolytter, forbedrede egenskaberZhirong Zhao-Karger (venstre) og Zhenyou Li (højre) fra POLiS (Post Lithium Storage) Cluster of Excellence lykkedes med at producere lovende elektrolytter til calciumbatterier. Kredit:Markus Breig/KIT
- Disruption er overvurderet med hensyn til innovation
- Hvordan du var med til at skabe krisen i private data
- Risikoen for cascading naturkatastrofer er stigende
- Unge studerendes læsefærdigheder gik i stå under pandemien
- Hyundai investerer 300 millioner dollars for at hjælpe Indias Ola med at kæmpe mod Uber
- Træt af videokonferencer? Forskning tyder på, at du har ret til at stille spørgsmålstegn ved det…