


En ny robotmanet, der er i stand til at udføre 3D-fremdrift og manøvrer
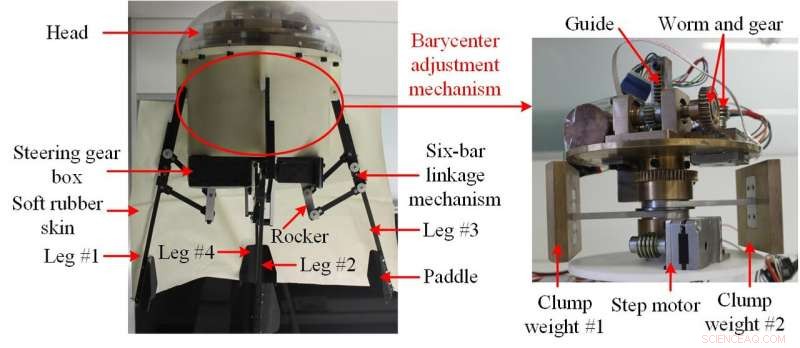
Den mekaniske konstruktion af robotmaneterne. Kredit:© Science China Press
Som inspirationskilde, vanddyr som fisk, hvaler, og vandmænd kunne inspirere til innovative designs til at forbedre den måde, menneskeskabte systemer fungerer på og interagerer med vandmiljøer. Vandmænd i naturen driver sig gennem deres omgivelser ved radialt at ekspandere og sammentrække deres klokkeformede kroppe for at skubbe vand bag dem, som kaldes jetfremdrivning.
I modsætning til den herskende opfattelse, at vandmænd beskrives som ineffektive svømmere, maneter har vist sig at være en af de mest energisk effektive svømmere. Det er, det har vist sig, at maneter-lignende svømning vil have en bemærkelsesværdig fremdriftsfordel, hvis der kræves lavenergi-fremdrift. Derfor, vandmændenes bevægelser har tiltrukket betydelig interesse i løbet af det sidste årti i forbindelse med bioinspirerede undervandsbiler.
For nylig, forskere fra Institute of Automation, Det kinesiske videnskabsakademi i Beijing, Kina har med succes udviklet en ny robot-vandmand, der er i stand til at udføre tredimensionelle maneter-lignende fremdrift og manøvrer baseret på en læringsbaseret metode til forstærkning.
Ved at kombinere de seneste fremskridt inden for mekatronisk design, materialer, elektronik, og kontrolmetoder, forskere gør en integreret indsats for at udvikle smarte aktuatorer til at fremstille forskellige robotmaneter. Generelt, sådanne robotmaneter er ofte bundet og meget langsommere i hastighed i sammenligning med den slags, der aktiveres af konventionelle elmotorer. De fleste eksisterende robotmaneter kan ikke frit justere deres tre-aksede holdning, som har en negativ effekt på frisvømmende fremdrift og sandsynlige anvendelser.
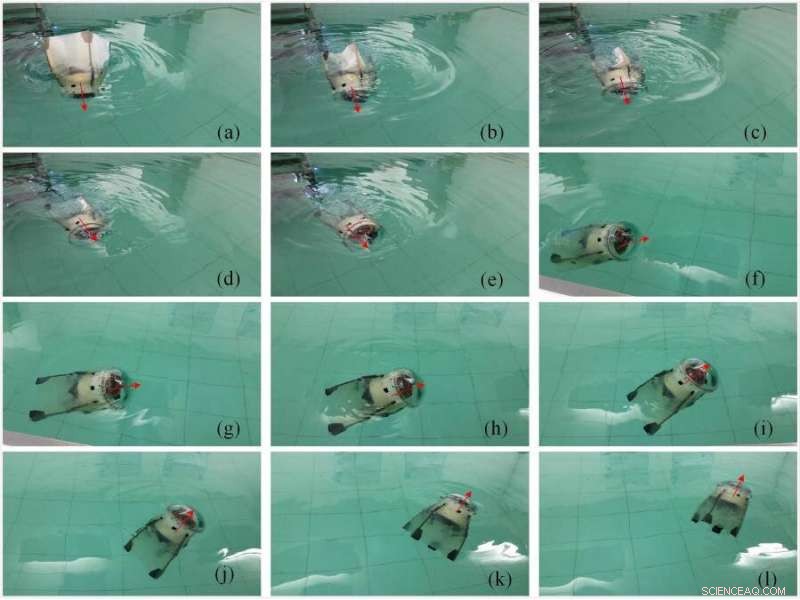
Snapshots af robotmanetler, der udfører en hybridbevægelse, der fletter lodret og vandret svømning. Kredit:© Science China Press
For at løse dette problem, forskergruppen ledet af prof. Junzhi Yu fra Institute of Automation, Det Kinesiske Videnskabsakademi, har undersøgt, hvordan et bioinspireret motordrevet maneterlignende robotsystem, der er i stand til 3D-bevægelse, er designet og kontrolleret.
De designede robotmaneter er modelleret efter Aurelia aurita (almindeligvis betegnet månemaneter), som har en relativt stor forskydning og er særligt velegnet til brug med stor lastkapacitet. Den er cirka 138 mm høj og vejer cirka 8,2 kg. Som illustreret i figur 1, robotmaneterne er halvkugleformede og består af et klokkeformet stift hoved, et cylindroid hovedhulrum, fire separate seks-stangs koblingsmekanismer, og en blød gummihud. For at øge manøvredygtigheden af robotmaneterne, en barycenter justeringsmekanisme, der er samlet inde i hulrummet, introduceres. Ved at justere to klumpvægte i lodret eller vandret retning eller i en kombination af de to, holdningsregulering opnås.
"Det er meget svært at etablere en præcis dynamisk model til vandmændslignende svømning, da det er en meget ikke -lineær, stærk kobling, og tidsvarierende system, "sagde prof. Junzhi Yu." Parametriske usikkerheder og ydre forstyrrelser i dynamiske vandmiljøer, på samme tid, forårsage vanskeligheder med at udlede kontrollove ved at løse det inverse kinematikproblem. "Derfor, der foreslås en forstærkningsindlæringsbaseret lukket kredsløb holdningskontrolmetode til robotmaneterne, som kan løse et optimalt beslutningskontrolproblem gennem direkte interaktion med miljøet, især uden behov for dynamisk modellering.
Endelig, forslaget om forstærkningsindlæringsbaseret holdningskontrolmetode gør autonom holdningsregulering mulig. "I sammenligning med de fleste andre robot -vandmænd, den indbyggede robot viser en høj grad af strukturfleksibilitet og manøvredygtighed, "Påpeger Yu. Han understregede også, at denne selvkørende robotmanet med 3D-bevægelse har store konsekvenser for bioinspireret design af jetfremdrivningssystem med stor smidighed.
 Varme artikler
Varme artikler
-
 BA kæmper for at løse tyveri af passagerbankoplysningerDatabruddet involverede 380, 000 bankkort British Airways vil økonomisk kompensere kunder, hvis bankkortdata blev stjålet i et sofistikeret og ondsindet hack, Det sagde administrerende direktør Al
BA kæmper for at løse tyveri af passagerbankoplysningerDatabruddet involverede 380, 000 bankkort British Airways vil økonomisk kompensere kunder, hvis bankkortdata blev stjålet i et sofistikeret og ondsindet hack, Det sagde administrerende direktør Al -
 Japan beordrer Facebook til at forbedre databeskyttelsenFacebook sagde i begyndelsen af denne måned, at hackere fik adgang til personlige data fra 29 millioner brugere i et brud på verdens førende sociale netværk Den japanske regering beordrede manda
Japan beordrer Facebook til at forbedre databeskyttelsenFacebook sagde i begyndelsen af denne måned, at hackere fik adgang til personlige data fra 29 millioner brugere i et brud på verdens førende sociale netværk Den japanske regering beordrede manda -
 Google Maps giver dig mulighed for at planlægge blandede rejseformer for komplicerede, ture med fle…Kredit:CC0 Public Domain Hvis din daglige rejse til arbejde kræver, at du cykler til busstoppestedet eller togstationen, før du tager en Uber til dit job, kan det blive nemmere at planlægge din ru
Google Maps giver dig mulighed for at planlægge blandede rejseformer for komplicerede, ture med fle…Kredit:CC0 Public Domain Hvis din daglige rejse til arbejde kræver, at du cykler til busstoppestedet eller togstationen, før du tager en Uber til dit job, kan det blive nemmere at planlægge din ru -
 Forskere udvikler elektroniske skins, der trådløst aktiverer helt bløde robotterGendannet version af e-skin pair-systemet til bløde robotter. Kredit:Soft Robotics Research Center, Seoul National University Et forskerhold fra Seoul National University har udviklet et hudlignen
Forskere udvikler elektroniske skins, der trådløst aktiverer helt bløde robotterGendannet version af e-skin pair-systemet til bløde robotter. Kredit:Soft Robotics Research Center, Seoul National University Et forskerhold fra Seoul National University har udviklet et hudlignen
- Ny metode til mælkepulver giver bedre skummiddel
- Forskere fanger et billede af negativ kapacitans i aktion
- Forbrugerne brugte mindre på slik og desserter, når de handlede online
- At komme sammen, falde fra hinanden, og starter forfra, batteristil
- Rejeinspireret kamera muliggør muligvis undervandsnavigation
- Moder Natur løber løbsk på Kinas smaragdsø