


Forskere udvikler elektroniske skins, der trådløst aktiverer helt bløde robotter
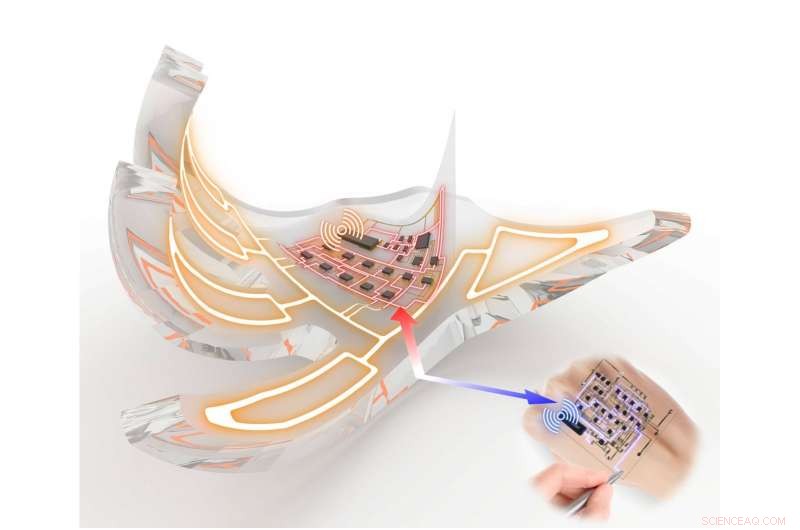
Gendannet version af e-skin pair-systemet til bløde robotter. Kredit:Soft Robotics Research Center, Seoul National University
Et forskerhold fra Seoul National University har udviklet et hudlignende elektronisk system, der er blødt, tynd, let og kan trådløst aktivere bløde robotter gennem en simpel lamineringsproces.
De udviklede et elektronisk skin (e-skin) par som et todelt, trådløst blødt køresystem baseret på fuldt printbar, strækbar hybridelektronik. Den ene del er e-skin til input sensing på en menneskelig side, og den anden til aktivering af bløde robotter. E-skindene er bløde (samme materiale til målrobotkroppen), tynd ( <1 mm), og letvægts (~0,8 g) og har også den rumligt fragmenterede kredsløbskonfiguration med en række miniature-IC-komponenter (standarddimension, <1,5 mm × 1,5 mm). Derfor, de kan strækkes og tilpasses den dynamiske overflade som menneskehud eller bløde robotter.
Den elektroniske funktionalitet af dette system er baseret på trådløs kommunikation mellem huden. E-skin-parret kan udføre trådløs kommunikation af fire-stats kontrolsignalet i en afstand på mere end 5 m, og den indlejrede kodningsmekanisme gør kommunikationen mellem huden støjtolerant.
De foreslåede e-skins kan være bløde, kompakt, og reversibelt samlet i bløde robotrammer for at aktivere muskellignende bløde aktuatorer uden at forstyrre deres bløde bevægelser. Fordelene ved denne e-skin-medierede bløde robotkonstruktion inkluderer koadaptiv bevægelse, der hjælper robotten med at passere igennem og/eller operere i meget begrænsede rum, hvis tværsnit er endnu mindre end robotstørrelsen. Desuden, det foreslåede e-skin-par og det tilsvarende trådløse inter-skin-kommunikationskoncept kan trådløst aktivere flere typer bløde robotter gennem reversibel samling af e-skinene.
Forskerne skriver bl. "Bløde robotter har store fordele ved organisk at integrere alle robotkomponenter uden stive grænser, men de nuværende bløde robotdesigner er stadig afhængige af stive komponenter for det meste i drivende dele. Denne e-skin åbner en ny vej for blød robotmontering. Den er blød, tynd, og let nok til, at en robot ikke kan opfattes, men det kan aktivere robotten som et kørende skin."
Forskningen vil blive offentliggjort i det 18. nummer af Videnskab robotik den 30. maj, 2018.
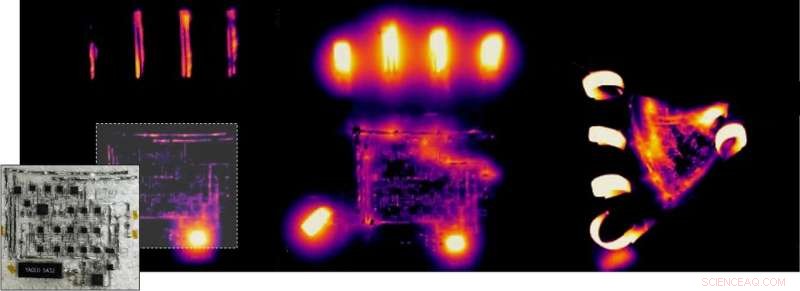
Billeder af betjeningen af den e-skin-integrerede fuldbløde robot. Kredit:Soft Robotics Research Center, Seoul National University
 Varme artikler
Varme artikler
-
 Mozilla -chef beklager internets vanedannende kvalitetMozilla -chef Mitchell Baker udtrykte utilfredshed med, hvordan internettet appellerede til de mørkere aspekter af menneskelig natur Webbrugere bliver trukket ind i et forhold til internettet, der
Mozilla -chef beklager internets vanedannende kvalitetMozilla -chef Mitchell Baker udtrykte utilfredshed med, hvordan internettet appellerede til de mørkere aspekter af menneskelig natur Webbrugere bliver trukket ind i et forhold til internettet, der -
 Online myteforbrydere bekæmper bølgen af falske nyheder i IndienAt afsløre falske nyheder, før det spredes, er en herculean opgave i Indien, hvor en anslået kvart milliard mennesker bruger sociale medier Som sorg og forargelse over voldtægten og drabet på en o
Online myteforbrydere bekæmper bølgen af falske nyheder i IndienAt afsløre falske nyheder, før det spredes, er en herculean opgave i Indien, hvor en anslået kvart milliard mennesker bruger sociale medier Som sorg og forargelse over voldtægten og drabet på en o -
 Feltforsøg validerer vindmøllens vågestyringspåvirkning i stor skalaNRELs eksperimentelle design til vågestyringsfeltkampagnen inkorporerede lidarmålinger af atmosfæriske forhold. Kredit:Andrew Scholbrock, NREL Hvis hver drejning af hjulet er en revolution, så er
Feltforsøg validerer vindmøllens vågestyringspåvirkning i stor skalaNRELs eksperimentelle design til vågestyringsfeltkampagnen inkorporerede lidarmålinger af atmosfæriske forhold. Kredit:Andrew Scholbrock, NREL Hvis hver drejning af hjulet er en revolution, så er -
 Det spanske leveringsfirma Glovo er ude for at erobre verdenGlovo, i modsætning til sine vigtigste rivaler, leverer mere end bare mad Med en ambitiøs 27-årig chef og en voksende hær af computeringeniører, Den spanske start-up Glovo jagter international væk
Det spanske leveringsfirma Glovo er ude for at erobre verdenGlovo, i modsætning til sine vigtigste rivaler, leverer mere end bare mad Med en ambitiøs 27-årig chef og en voksende hær af computeringeniører, Den spanske start-up Glovo jagter international væk
- Boeing, Airbus, GE blandt de største tabere fra det amerikanske Iran-skifte
- For at vende tilbage til månen, astronauter har brug for nye rumdragter
- Når dårlige økonomiske rådgivere sker for gode mennesker
- Rumteknologi forudser tørke flere måneder i forvejen
- Robotflåde dykker efter klimasvar i marin sne
- Mere benplads, mindre samtale for Uber-ryttere, der betaler