


Selvfoldende Rollbot baner vejen for helt ubundne bløde robotter
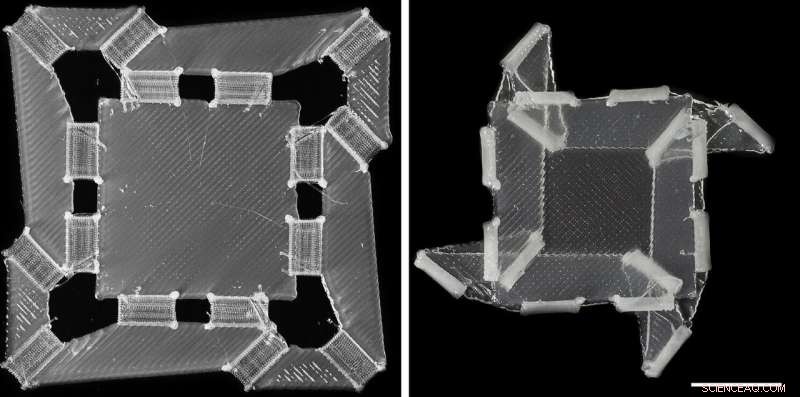
Firkantet twist origami enhed. Kredit:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
De fleste bløde robotter er i dag afhængige af ekstern strøm og kontrol, holde dem bundet til off-board systemer eller rigget til med hårde komponenter. Nu, forskere fra Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) og Caltech har udviklet bløde robotsystemer, inspireret af origami, som kan bevæge sig og ændre form som reaktion på ydre stimuli, baner vejen for fuldstændig ubundne bløde robotter.
Forskningen er publiceret i Videnskab robotik .
"Evnen til at integrere aktive materialer i 3D-trykte objekter muliggør design og fremstilling af helt nye klasser af blødt robotstof, " sagde Jennifer A. Lewis, Hansjorg Wyss professor i biologisk inspireret ingeniørvidenskab ved SEAS og medforfatter af undersøgelsen.
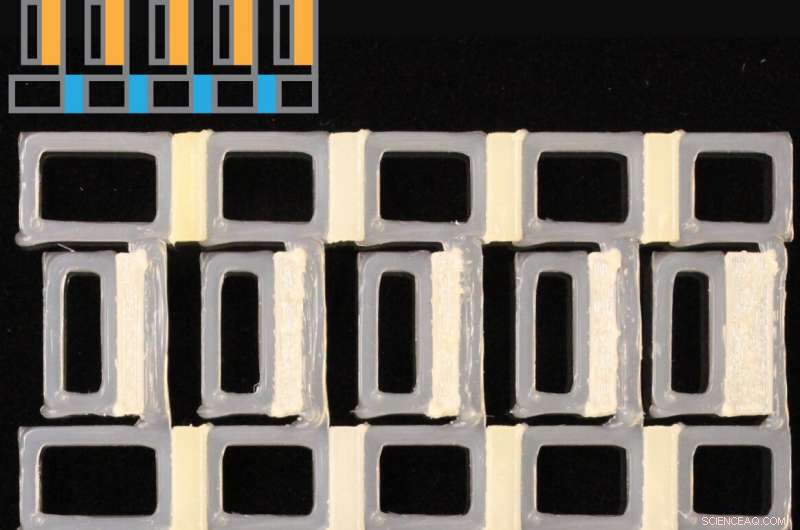
Forskerne henvendte sig til origami for at skabe multifunktionelle bløde robotter. Gennem sekventielle folder, origami kan kode flere former og funktionaliteter i en enkelt struktur. Ved at bruge materialer kendt som flydende krystal elastomerer, der ændrer form, når de udsættes for varme, forskerholdet 3-D-printede to typer bløde hængsler, der foldes ved forskellige temperaturer og dermed kan programmeres til at folde i en bestemt rækkefølge.
"Med vores metode til 3D-print af aktive hængsler, vi har fuld programmerbarhed over temperaturrespons, mængden af drejningsmoment hængslerne kan udøve, deres bøjningsvinkel, og fold orientering. Vores fremstillingsmetode letter integration af disse aktive komponenter med andre materialer, " sagde Arda Kotikian, en kandidatstuderende ved SEAS og Graduate School of Arts and Sciences og medførsteforfatter af papiret.
"Ved at bruge hængsler bliver det nemmere at programmere robotfunktioner og kontrollere, hvordan en robot vil ændre form. I stedet for at få hele kroppen af en blød robot deformeret på måder, der kan være svære at forudsige, du behøver kun at programmere, hvordan nogle få små områder af din struktur vil reagere på ændringer i temperatur, " sagde Connor McMahan, en kandidatstuderende ved Caltech og med-førsteforfatter af papiret.
For at demonstrere denne metode, Kotikian, McMahan, og holdet byggede flere bløde enheder, inklusive en ubundet blød robot med tilnavnet "Rollbot". Rollbot begynder som et fladt ark, cirka 8 centimeter lang og 4 centimeter bred. Når den placeres på en varm overflade, omkring 200°C, et sæt hængsler foldes, og robotten krøller sig til et femkantet hjul.
Et andet sæt hængsler er indlejret på hver af de fem sider af hjulet. Et hængsel folder, når det er i kontakt med den varme overflade, at drive hjulet til at dreje til den næste side, hvor det næste hængsel folder. Når de ruller af den varme overflade, hængslerne folder sig ud og er klar til næste cyklus.
"Mange eksisterende bløde robotter kræver en tøjring til eksterne strøm- og kontrolsystemer eller er begrænset af mængden af kraft, de kan udøve. Disse aktive hængsler er nyttige, fordi de tillader bløde robotter at operere i miljøer, hvor tøjringene er upraktiske og løfte genstande mange gange tungere end hængslerne, " sagde McMahan.
En anden enhed, når de placeres i et varmt miljø, kan foldes til en kompakt foldet form, der ligner en papirclips og folde sig ud, når den er afkølet.
"Disse ubundne strukturer kan kontrolleres passivt, "sagde Kotikian." Med andre ord, alt, hvad vi skal gøre, er at udsætte strukturerne for specifikke temperaturmiljøer, og de vil reagere i henhold til, hvordan vi programmerede hængslerne."
Mens denne forskning kun fokuserede på temperaturresponser, flydende krystal elastomerer kan også programmeres til at reagere på lys, pH, fugt og andre ydre stimuli.
Selvkørende Rollbot vist i sin trykte konfiguration (ovenfor) og i sin foldede konfiguration (nedenfor). Kredit:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
"Dette værk viser, hvordan kombinationen af responsive polymerer i en arkitektonisk komposit kan føre til materialer med selvaktivering som reaktion på forskellige stimuli. I fremtiden, sådanne materialer kan programmeres til at udføre stadig mere komplekse opgaver, udvisker grænserne mellem materialer og robotter, " sagde Chiara Daraio, Professor i maskinteknik og anvendt fysik ved Caltech og medforfatter af undersøgelsen.
 Varme artikler
Varme artikler
-
 Vil falske tilhængere af sociale medier afspore den blomstrende marketingvirksomhed med influencer?Kredit:Greg Grinnell/Northeastern University Kendte personer, stjerner på sociale medier, og andre online personligheder har ramt deres troværdighed i de seneste måneder, da millioner af deres føl
Vil falske tilhængere af sociale medier afspore den blomstrende marketingvirksomhed med influencer?Kredit:Greg Grinnell/Northeastern University Kendte personer, stjerner på sociale medier, og andre online personligheder har ramt deres troværdighed i de seneste måneder, da millioner af deres føl -
 USA's told på bilimport er et tveægget sværdTruede amerikanske toldsatser på importerede køretøjer udgør en risiko for indenlandske såvel som udenlandske producenter USAs præsident Donald Trumps trussel om at beskatte importerede biler i de
USA's told på bilimport er et tveægget sværdTruede amerikanske toldsatser på importerede køretøjer udgør en risiko for indenlandske såvel som udenlandske producenter USAs præsident Donald Trumps trussel om at beskatte importerede biler i de -
 Ligesom Uber, men for organer:første nyre leveret med droneDette billede fra University of Maryland Medical Center (UMMC) viser en dronelanding, da den leverer en nyre til transplantation på UMMC i Baltimore, Maryland, den 19. april, 2019. En nyre, der er
Ligesom Uber, men for organer:første nyre leveret med droneDette billede fra University of Maryland Medical Center (UMMC) viser en dronelanding, da den leverer en nyre til transplantation på UMMC i Baltimore, Maryland, den 19. april, 2019. En nyre, der er -
 Deepfakes:Hvad feer og aliens kan lære os om falske videoerKredit:Meyer_solutions/Shutterstock.com Deepfake er navnet, der gives til videoer skabt gennem kunstigt intelligente deep learning-teknikker. Også omtalt som ansigtsbytte, processen involverer ind
Deepfakes:Hvad feer og aliens kan lære os om falske videoerKredit:Meyer_solutions/Shutterstock.com Deepfake er navnet, der gives til videoer skabt gennem kunstigt intelligente deep learning-teknikker. Også omtalt som ansigtsbytte, processen involverer ind
- Træer til vandkvalitetskreditter
- Ændringer i ikke-ekstrem nedbør kan have ikke så subtile konsekvenser
- Droner tæller omkostningerne ved 2017 f.Kr. naturbrande
- En ny måde at observere laserinteraktioner på kan forbedre laserbaseret fremstilling
- Virus, orkansæson forsinkelse fjernelse af ødelagt lastskib
- Red træerne:Uendelig byggeri i byer truer byskoven